



Abstract: This paper introduces the working principle of MTS displacement sensor, the installation method and the application in TMEIC V-TOOL control system. It mainly introduces the data acquisition process of MTS displacement sensor and classifies the alarm information to help the technician to locate the fault quickly.
Key words: MTS displacement sensor Position detection V-TOOL control PLC
【中图分类号】TP212.9 【文献标识码】B 文章编号1606-5123(2018)01-0000-00
1 引言
随着我国国民经济的快速发展,钢铁行业朝着高集成全自动控制方向大步迈进。为了保证钢铁制造的安全、稳定快速,要求轧钢设备具有高精度、快速响应的能力。这就对设备的位置控制技术提出了更高的要求。经过技术的不断进步和改进,现在较为先进的位置控制系统中绝大多数采用具有非接触式测量、适应恶劣环境且可靠性高的磁致伸缩位移式传感器。下面以MTS位移传感器为例,介绍一下磁致伸缩位移式传感器的工作原理以及在TMEIC V-TOOL控制系统中的应用。
2 MTS位移传感器的工作原理
2.1 工作原理
MTS位移传感器的工作原理如图1所示。
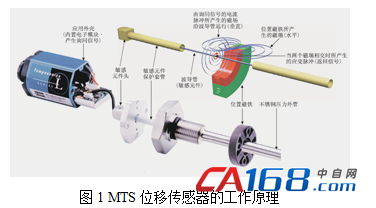
MTS位移传感器是用磁致伸缩的原理,利用两个不同的磁场相交时产生一个应变脉冲信号,然后计算这个信号被探测的时间周期,从而换算出准确的位置。这两个磁场一个来自活动磁铁,另一个来自传感器头的电子部件产生的电流脉冲。这个询问信号脉冲沿着传感器内以磁致伸缩材料制成的波导管,以声音的速度运行。当两个磁场相交时,波导管产生磁致伸缩现象,产生一个应变脉冲。这个返回信号脉冲很快被电子头的感测电路探测到。从产生询问信号的一刻到返回信号被探测到所需的时间周期乘以固定的声音速度,便能准确的计算出磁铁的位置变动。这个过程是连续不断的,所以每当活动磁铁被带动时,新的位置就会被很快的感测出来。
2.2 信号输出
由于输出信号是一个真正的绝对位置输出,而不是比例的或需要再放大处理的信号,所以不存在信号飘移或变值的情况,因此不必像其它位移传感器一样需要定期重标和维护。
2.3 环境健壮性
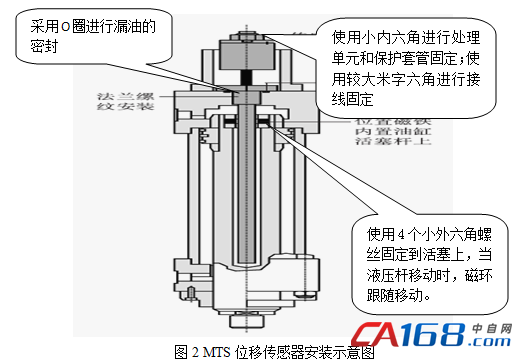
磁致伸缩位移传感器利用非接触方法检测活动磁铁的位移,由于磁铁和传感器并无直接接触,因此传感器在恶劣的工业环境下,例如易受油渍、溶液、尘埃或其他的污染,并不构成问题。此外,传感器更能承受高温、高压和高振荡的环境。传感器输出信号为绝对数值,所以假使电源中断重接也不会对数据接收构成问题,更无须重新归回零位。最后,由于传感元件都是非接触的,所以就算感测过程是不断重复的,也不会对传感器造成任何磨损。因此磁致伸缩位移传感器非常适合这种工作在比较恶劣环境轧机设备。现场安装示意如图2所示。
3 MTS在TMEIC V-TOOL 中的应用
3.1 系统通讯
TMEIC V-TOOL 控制系统中是首钢京唐2250轧线自动化控制系统的核心。本系统是一个高精度、高响应的控制系统,要求位置检测元件能够提供稳定快速可靠的测量数据。因此选用
了美国MTS公司的 RHS系列的位移传感器,采用串连同步接口(SSI)方式与TMEIC V-TOOL控制系统连接,如图3所示。
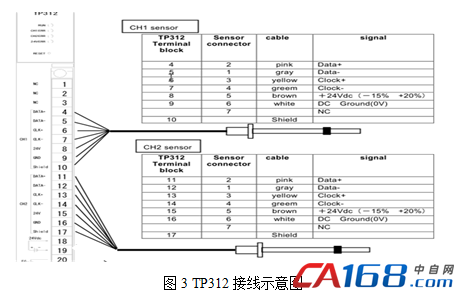
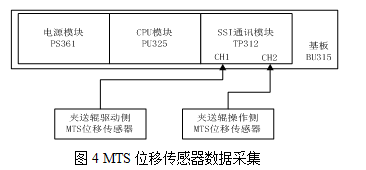
TMEIC V-TOOL控制系统中通过专门的板卡TP312来接收采集MTS位移传感器检测数据,然后再通过TP312把数据传送给CPU进行数据的运算处理,把处理结果通过指令发送给相应的执行元件,来实现对相应设备快速准确控制。TMEIC公司根据MTS厂家给定的位置传感器工作原理研制出TP312板卡,专门用于采集具有SSI输出形式的R系列MTS位移传感器的检测信号,该板卡具有2通道,能够同时接收2路MTS位移传感器信号。如图4所示。
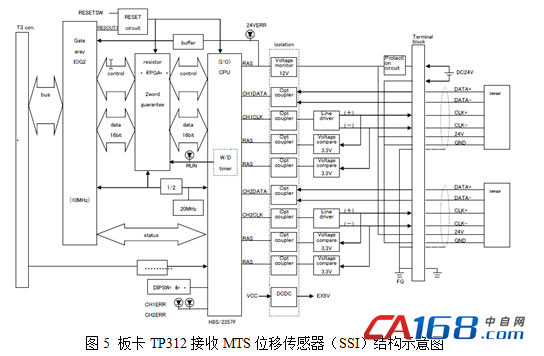
MTS公司提供的SSI同步串行接口数字输出方式,能够取代绝对值编码器,并且该输出方式能够减少所需电缆的数目,例如,一个24位的编码器需要25条线作为通讯,而SSI形式只需要4条便可。因为信号是串连的24或25位,所以只需由控制器时钟(一般为25MHz)发出一组25或26个的时钟脉冲便可,如图5所示。
3.2 传感器零点设定
传感器的零点可以根据需要在有效区内任意设定,零点的成功设置直接影响到该传感器的正确应用。将传感器零点时的脉冲数保存起来,以备位移采集时使用。
3.3 位移量的采集计算
由于本系统中,应用的位移零点都设定在某一端。所以程序设计中不存在判别移动方向问题。当设备移动时,通过读取站点地址的低位、中位脉冲数相加再加上预置时的脉冲数既是当前的非线性化的位置值,再减去偏差值除以固定系数就是工程实际值。
3.4 MTS位置传感器和TP312报警的关系
(1)通过测试得出的MTS位置传感器和TP312报警的关系如表1所示。
表1 MTS和TP312报警关系
|
序号 |
故障 |
位置传感器反馈 |
TP312状态字 |
|
1 |
CH1数据线(粉灰)全掉或单独掉 |
16777215/16777215 |
9216 |
|
2 |
CH2数据线(粉灰)全掉或单独掉 |
16777215/16777215 |
12288 |
|
3 |
CH1和CH2数据同时断 |
16777215/16777215 |
13312 |
|
4 |
CH1时钟线正或负掉1个 |
数据乱闪/正常 |
0 |
|
5 |
CH1时钟线同时掉(黄绿) |
0/正常 |
9216 |
|
6 |
CH2时钟线单独掉1根 |
正常/数据闪烁 |
0 |
|
7 |
CH2时钟线全掉 |
正常/0 |
12288 |
|
8 |
CH2数据和时钟掉 |
正常/16777215 |
12288 |
|
9 |
CH1数据和时钟掉 |
16777215/正常 |
9216 |
|
10 |
CH1和CH2时钟线同时掉 |
0/0 |
13312 |
|
11 |
CH1和CH2数据线同时掉 |
16777215/16777215 |
13312 |
|
12 |
CH1数据掉和CH2时钟掉 |
16777215/乱闪 |
9216 |
|
13 |
CH1时钟掉和CH2数据掉 |
乱闪/16777215 |
12288 |
|
14 |
模块断电 |
16777215/16777215 |
29696 |
|
15 |
CH1电源+断和CH2电源+断 |
16777215/16777215 |
13312 |
|
16 |
CH1电源正常,CH2电源+断 |
正常/16777215 |
28672 |
|
17 |
模块松动 |
保持出故障那一刻的数据 |
0 |
|
18 |
CPU HALT/ERROR |
保持出故障那一刻的数据 |
0 |
|
19 |
时钟虚接 |
数据闪烁 |
0 |
|
20 |
数据虚接 |
正常/16777215互闪 |
9216/0互闪 |
|
21 |
电源虚接 |
正常/16777215互闪 |
9216/0互闪 |
(2)板卡TP312接收处理MTS位移传感器数据状态与报警数据如表2所示。
表2 TP312接收处理MTS位移传感器数据状态与报警数据

(3)通过研究MTS位移传感器和TP312报警的关系,发现并找到有规律的东西,总结发现,当数据和时钟同时出现故障时,数据故障优先,报警信息以数据发生故障的通道优先。比如当CH1数据故障,CH2时钟故障时,报警信息是9216,读数分别为CH1 16777215,CH2数据闪烁。上述故障为缺少磁环,或者磁环破裂和损坏所导致的现象。根据以上总结统计出来的板卡TP312的状态,非常容易判断出现场哪里出现了故障,能够及时准确的帮助技术人员锁定故障并采取有效的措施预计解决,避免了现场故障导致生产事故的发生。因为MTS位移传感器一般都是应用在高精度的位置控制设备中,一旦MTS位移传感器发生故障,将会造成V-TOOL PLC无法准确接收数据,无法准确判断出现场设备具体的位置状态,这就会容易导致位置控制异常,并且严重的会造成设备的严重损害及生产事故。
4 结束语
自应用这种MTS位移传感器以来,其可靠的稳定性、精度的准确性以及安装的便捷性为重轨轧机的快节奏、大负荷生产以及高质量标准提供了有力保障。实践证明,应用磁致伸缩位移传感器具有非常低的故障率,并且为生产的全集成自动化提供了有力保障。
参考文献(略)
作者简介
刘顺东 (1978-) 男 工学学士 高级工程师 研究方向:自动化控制与检测技术






共0条 [查看全部] 网友评论