



1
引言
随着现代交通的日益发达和汽车工业的不断发展,道路条件的不断改善,汽车速度的不断提高,随之而来的是交通事故频繁发生。汽车在道路行驶中,如遇恶劣天气、路况较差、交通拥堵或驾驶员疲劳等情况,极易发生汽车追尾,甚至连环交通事故。这给人民的生命财产安全带来了极大威胁,也突显出了设计汽车智能主动防撞安全系统的必要性和迫切性。所以本文中关于设计车载防撞预警系统就显得非常重要。
据统计,约有一半的汽车交通事故是因为汽车偏离正常的行驶车道引起的。研究表明,驾驶员在碰撞前0.5秒得到预警,就可以避免至少60%的追尾碰撞事故、30%的迎面碰撞事故;如果有1.5秒的预警时间,则可避免90%的事故发生。驾驶员心神烦乱、注意力不集中或驾驶疲劳极易导致高事故发生率。
我们研究发现发生车祸最常见的两种场景:
①在高速公路中行驶,当前车发生意外而车速减小时,后面的车通常不能直观的观测到前车状况,当知晓前车状况时已不及刹车从而造成严重的交通事故。
②在具有多路支口公路行驶,当本车正常行驶,由于路面状况不便观察或者因为车辆本身视角原因,前方侧面路口突然行驶出一辆汽车,这样非常容易造成车祸。
综上所述,本系统功能有:
(1)采用激光测距雷达,记录并显示车运行的数据。激光测距雷达能够检测前方车速、检测本身车速、智能预算、预测最低报警。
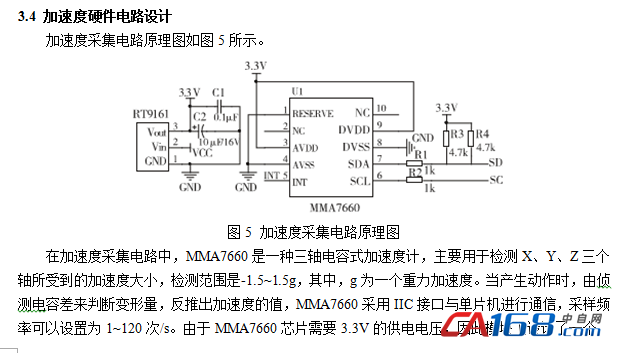
(2)通过四位数码管实时显示当前的速度、相对速度、距离等数据,数据能够从四位数码管上直接读取。
(3)通过LED指示灯观看比较直观的距离,使其一目了然。
2 工作原理
汽车的防追尾碰撞安全系统由两个部分组成。第一部分是防追尾碰撞警报系统,该系统在探测到路面上出现危险情况时提前发出警报。第二部分是防追尾自动制动系统,该系统只在传感器探测到行驶情况为极度危险时才起作用,本系统侧重预警。
系统由目标识别系统和危险估计系统组成。
目标识别系统将激光雷达传感器的信息经融合处理后,估计出本车前方距离最近的车辆或障碍物的距离和相对速度,并将此信号传送给危险估计系统。
危险估计系统根据路面状况(湿/干)、本车的状况(如车速、转向角及横向摆动速率)、距前车的距离和相对速度以及司机的反应状况计算出“安全距离值”,并将实际测量![]() 的与安全距离值
的与安全距离值![]() ,报警器发出警告信号。当
,报警器发出警告信号。当![]() 等于或小于
等于或小于![]() 时,自动启动制动控制系统。
时,自动启动制动控制系统。
在控制单元设计方面,“安全距离值”的确定将是一个至关重要的。在确定该距离时,有时还得考虑驾驶员的反应时间、路面干湿状况等,并且通过模糊推理将评估结果送到危险警示系统和刹车控制系统中。预警系统整体框图如图1所示。
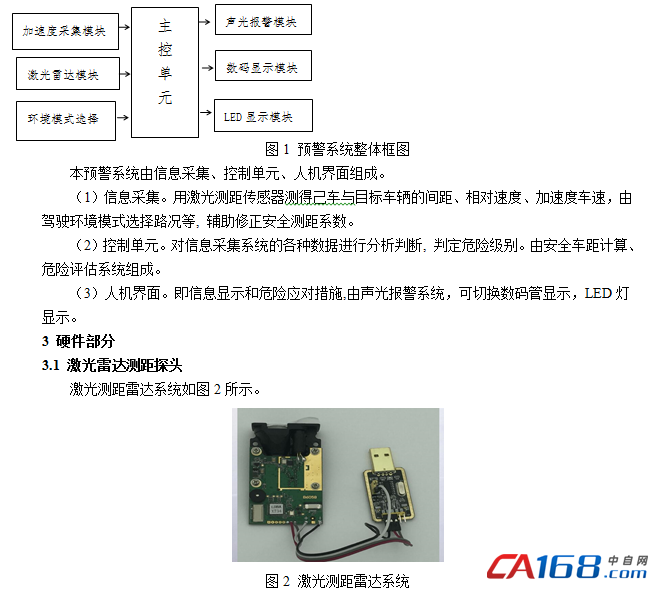
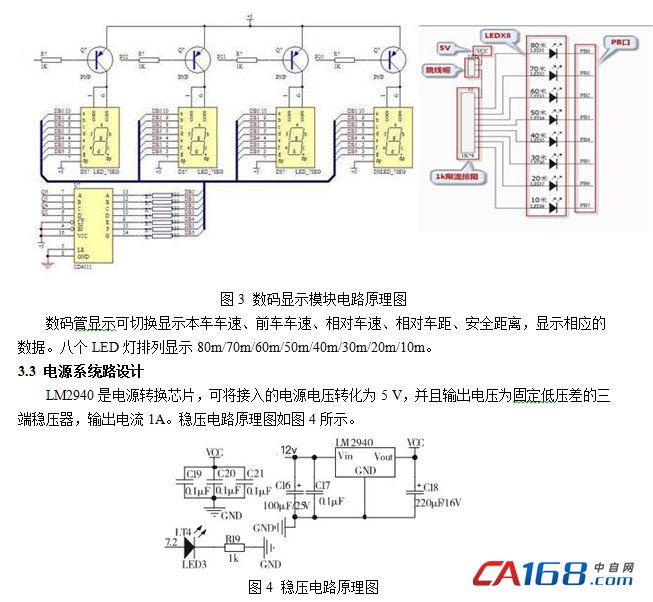
测距探头用了探测本车与前方障碍物的距离,它是由激光测距系统和集光定位系统两部分组成,集光定位用于调整探头的方向。探头特点:探测距离远,抗干扰性强,不受昼夜光线影响。测量范围0.03-100米,测量精度±1mm,测量时间:0.3-3秒,激光类型:635nm<1mW,接口为串口RS-232 TTL供电电压:3.3V(2.8-3.2V)。
3.2 显示系统电路设计
数码显示模块电路原理图如图3所示。
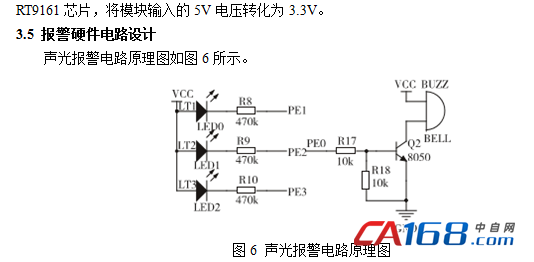
蜂鸣器用于声音报警,三极管8050的作用是信号放大,以提高蜂鸣器的报警声音。发光二极管分为“红”、“黄”、“绿”三种颜色。当发光二极管的绿灯亮,蜂鸣器不发声;当发光二极管的黄灯,亮蜂鸣器持续发出“滴”声;当发光二极管的红灯亮,蜂鸣器持续发出连续“滴滴滴”声。
3.6 环境模式设置
环境模式原理图如图7所示。
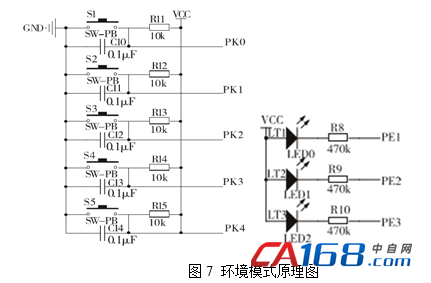
图7中:S1代表显示数据选择(本车车速、前车车速、相对车速、相对车距、安全距离);S2代表环境模式(晴天、雨天、雾天);S3演示模式开关;S4 数据设置(可自由设置车速数据);S5数据设置。
3.7 制动电机
反复验证防撞预警效果后,确保行车安全,后续加装制动电机。制动执行机构如图8所示。

6 系统调试
本系统安装简单,用户可自行安装,将设计系统安装到汽车上,进行测试,并显示车辆实时速度,实时距离等,实时安全距离预警。经反复测试,系统不是很稳定。
参考文献:
[1]杨翠萍.官慧峰.高速公路汽车防撞系统的安全行车距离研究[J].自动化仪表, 2008(9).
[2]侯德藻,刘刚等.新型汽车主动避撞安全距离模型[J].汽车工程, 2005(02).
[3]罗新闻.混合制动系统及其EBD/ABS控制研究[J].河北工业大学,2007(7).
[4]李朋.汽车主动防撞系统控制模式的研究[D].南京航空航天大学, 2012.
[5]刘树峰,吕钊钦.多路况下汽车防碰撞及行人保护预警系统设计[J].山东农业大学学报:自然科学版,2014(2).
[6]孔金生,赵亮.汽车防碰撞安全控制系统的研究综述[J].河南科技大学学报自然科学版,2014(7).
作者简介
陈帅华 (1979—) 女 高级实验师/讲师 研究方向:嵌入式教学及硬件开发。






共0条 [查看全部] 网友评论