



Abstract: With the speed sensorless control technology is widely used in the field of electric traction, the system reliability and security more and more attention. The stable operation is the key to accurate access to speed information.In this paper, the sliding mode theory was applied to vector control system. The rotor speed is estimated by a sliding mode observer instead of the traditional velocity sensor, analysis of the error. The adaptive law of the rotational speed is derived from the theory of liyapunov stability theory. Finally, matlab/simulink simulation platform is used to verify the feasibility of the system. The results show that when the motor is stable,the speed error is small, the recognition degree is high,and the current is stable, the torque ring should be fast.
Key words: Electric traction; Sliding mode observer; Speed identification
【中图分类号】TM922【文献标识码】B 【文章编号】1561-0330(2018)02-0000-00
1 引言
高速铁路的发展作为国家发展战略的重点,是国民经济的大动脉,不断追求安全稳定、节能增效的控制策略成为近年来的研究热点。由于动车组列车运行的工况复杂,能否准确地获取转速信息是保证安全稳定的前提。在现代电力牵引控制系统中,由于速度传感器的安装,增大了系统的体积和重量,不利于列车轻量化的实现,同时,它的造价昂贵且易受外界工作环境影响[1]。因此,为弥补速度传感器的缺陷,对无速度传感器的研究在电力牵引系统中就显得尤为重要[2]。
采用无速度传感器,同时保证列车安全可靠地运行,首先,要对转速信息进行精准的识别,现阶段,全阶自适应法[3]和模型参考自适应法(MRAS)是电力牵引领域中应用较广的两种辨识转速的方法。全阶自适应状态观测器法是以系统理想模型为基础建立的[4-5],在实际运行中,电机因参数的变化而带来转速估算的误差,低速时尤为明显[6]。MRAS法调速范围广,但在电压计算时引入了纯积分环节,使系统增益系数调节复杂,低速时不能保证对转速的精确估计[7]。文献[8]采用定子电流MRAS法,通过对比真实值和估算值,设计自适应律,该方法虽然减弱了饱和积分对转速的影响,但计算过程中不可避免磁链的相互耦合,进而造成输出电流值存在不稳定区间。文献[9][10]引入低通滤波器,虽然解决了饱和积分和磁链耦合的问题,但在抑制直流偏移时引起了定子磁链的相位误差。
基于滑模观测器的控制策略,其本质上是对转速的变化采取非线性控制,在电机运行过程中,受电机参数变化影响较小[11-12],降低外界因素的干扰;此外,滑模控制律只与滑模面系数有关,实现解耦的同时简化了系统模型;文献[13]分别介绍了几种不同趋近律的变结构控制,并对PID算法及指数趋近律做了仿真对比,结果证实了滑模控制具有控制精度高的优势;文献[14]采用一般趋近律的滑模控制,利用Lyapunov稳定性理论求得转速自适应律,并引入比例积分以提升系统的动态性能。文献[15]通过两个等效控制的自适应观测器相互作用,减弱系统对电机参数准确性的依赖,但由于系统电流模型中没有速度反馈信息,造成电机低速时转速估计值不能很好地跟踪实际值。
本文针对动车组列车大功率牵引电机的矢量控制系统,用低通滤波器代替电流模型中的积分项,以包含转速信息的定子电流为可调模型,不包含转速信息的定子电压为参考模型,根据李雅普诺夫函数判断该控制策略的可行性,进而设计出转速的自适应律,并采用基于速度反馈的闭环控制,使转速估计值可以不断接近实际值,最后利用simulink软件搭出系统仿真模块,模拟动车组列车轻载启动的情况,对提出的滑模观测器进行实验验证。
2 滑模状态观测器
2.1 异步电机的数学模型


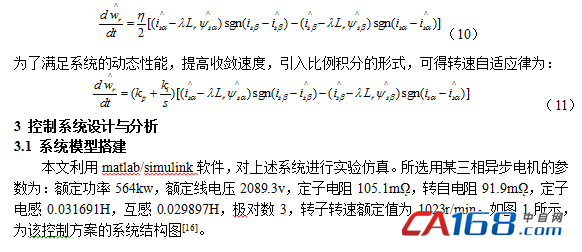
构成双闭环反馈,辅以电压前馈控制,保证当电机转矩达到给定时,三相电流输出值平滑稳定且无明显脉动。SMO模块以逆变器输出的三相电压、电流为输入量,通过前文对状态变量地推导及矩阵计算,结合滑模变结构控制原理,推导出转速观测值,并与真实值比较,使滑模观测器中计算出的转速估计值不断地接近实际值。
3.2 实验结果分析
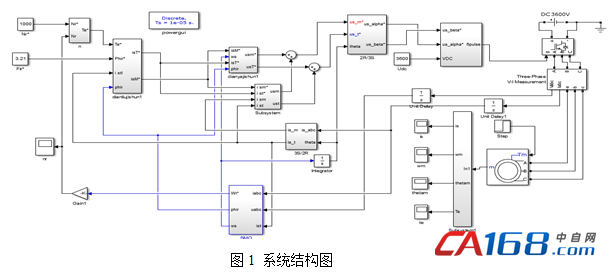
本文模拟动车组列车轻载启动的情况,给定电机的额定转速为1000 r/min,给定负载转矩2000N·m,仿真时长为2s。如图2可知(实线代表转速的实际值,虚线代表转速的观测值),在电机还未达到额定转速时,由于观测器自身存在一定的延时现象,所以造成转速的观测值有很小的滞后误差,但在整个大功率的交流调速系统中,该滞后误差不影响列车的安全运行,可以满足动态性能的要求。
4 结语
本文将滑模控制理论应用在大功率的牵引传动系统中,对系统轻载启动进行仿真研究,实验结果表明,系统在启动过程中,虽然转速存在一定的滞后误差,但整体上不影响系统的动态响应能力,且转矩响应速度快,磁链可以在比较短的时间内建立。当系统达到稳定运行时,采用滑模观测器可以保证对转速值的精确辨识,电流值稳定,不会产生额外的谐波干扰。
参考文献
[1] Wang K, Chen B, Shen G, et al. Online Updating of Rotor Time Constant Based on Combined Voltage and Current Mode Flux Observer for Speed-sensorless AC Drives[J]. IEEE Transactions on Industrial Electronics, 2014, 61(9): 4583-4593.
[2]苟立峰.用于地铁车辆的无速度传感器矢量控制策略研究[D]. 北京交通大学, 2015: 2-3.
[3]杨美霞.基于城铁的异步电机无速度传感器控制技术研究[D]. 北京交通大学, 2013: 3-4.
[4]李彬郎,张斌,秦帅.全阶状态观测器在转速辨识系统中的应用改进[J].电气传动,2015,45(3): 7-8.
[5]李明才.感应电机宽范围无速度传感器矢量控制系统研[D].清华大学, 2003.
[6]奚国华,沈红平,喻寿益,等.异步电机无速度传感器直接转矩控制系统[J].中国电机工程学报, 2007, 27(21): 76-82.
[7]丁荣军,桂卫华.无速度传感器控制技术及其在大功率牵引传动中的应用研究[J].铁道学报, 2008, 30(1): 76-77.
[8]张笠君,阮毅,吴晓新,等.基于定子电流的MRAS转速估计方案[J].电机与控制应用,2014, 41(10): 6-7.
[9]Nik R N I, Adbul H M Y. An improved stator flux estimation in steady state operation for direct torque control of induction machines[J]. IEEE Transactions on Industry Applications, 2002,38(1): 110-116.
[10]Vranka P, Griva G, Profumo F. Practical improvement of simple U-I flux estimator for sensor less F. O. Controllers operation in the low speed region[C]// Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society. Aachen, Germany: IEEE, 1998: 1615-1620.
[11]Mihai Comanescu,Longya Xu. sliding-Mode MRAS Speed Estimators for Sensorless Vector Control of Induction Machine[J]. IEEE Trans. Ind.Appl., 2006, 53(1): 146-153
[12]A. Benchaib, A. Rachid,E. Audrezet,M. Tadjine.Real-time sliding mode observer and control of an induction motor[J]. IEEE Trans.Ind.Electron, 1999 ,46(1): 128-137.
[13]余香.基于混合滑模变结构的异步电机矢量控制系统研究[D].河北工程大学, 2014.
[14]李卓,卢子广.基于滑模观测器的异步电机无速度传感器控制[J].电气传动.2006,46(7): 12-15.
[15]蔡焱钢,南余荣.一种用于无速度传感器异步电机控制的自适应滑模观测器[J].电机与控制应用, 2008, 35(1): 13-16.
[16]周明磊,游小杰,王琛琛.电力机车牵引传动系统矢量控制[J].电工技术学报,2011,13(9): 110-115.
作者简历
褚方舟(1992-) 男 硕士在读 研究方向为动车组牵引交流传动系统,滑模变结构控制






共0条 [查看全部] 网友评论