


Abstract: Aiming at the problem that the control system is not accurate and working load fluctuation is large, it is proposed to use the fuzzy self-adjusting PID control method to the control system of roller press. The fuzzy controller is analyzed and designed, including the fuzzification of inputs and outputs, the selection of membership functions, the establishment of fuzzy control rules, fuzzy reasoning, ambiguity resolution, and the determination of quantization factors and scale factors. The system is simulated by MATLAB/Simulink, and the results show that the control system has fast response, small overshoot, strong robustness and small oscillation, which meets the requirement of stable working load of roller press in complicated working environment..
Keyword: Roller Press Fuzzy Self-Adjusting PID Control SIMULINK
【中图分类号】{TG375+.21} 【文献标识码】B 文章编号1606-5123(2018)02-0000-00
1 引言
辊压机是一种高效节能粉磨设备,被广泛应用于水泥、矿山、冶金、化工等行业脆性物料的粉磨[1]。但由于目前手动控制或采用常规的控制方法已经不能满足辊压机在复杂工况下工作,因而无法保证辊压机在稳定运行条件下其生产效率的提高。因此,提高辊压机控制系统的稳定性显得尤其重要。大多数辊压机的工作过程都呈现非线性,当工作过程或环境发生变化,控制器需要作相应的调整来保证控制质量时,采用常规的PID控制方法虽然算法简单、可靠性好,但难以实时调整PID参数[2]。所以,本文采用模糊自调整PID控制方法,通过对PID参数的在线调整,能够对控制目标进行实时控制,增强了辊压机的工作稳定性,提高了工作效率。
2 辊压机模糊自调整PID控制系统原理
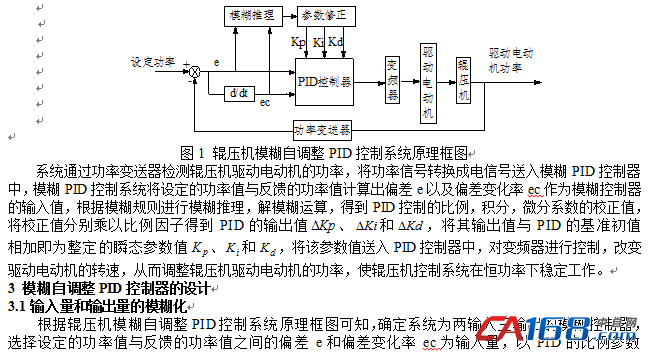
模糊自调整PID控制器是运用模糊数学的基本理论和方法,利用模糊逻辑并按照一定的模糊规则对PID控制的比例,积分,微分系数进行在线调整以达到理想的控制效果[3]。对于辊压机自动控制系统来说,其主要的控制目标是实现辊压机工作负荷稳定,即控制辊压机驱动电动机的功率恒定。辊压机模糊自调整PID控制系统原理框图如图1所示。
参考文献
[1]海洋.辊压机半终粉磨系统的操作与控制[J].新世纪水泥导报,2017,(01):65-67.
[2]述彦,师宇,冯忠绪. 基于模糊PID控制器的控制方法研究[J].机械科学与术,2011,30(01):166-172.
[3]艳艳,钱蕾,冯金龙. 基于Matlab的模糊PID控制系统设计及仿真[J]. 电子科技,2015,(02):119-122.
[4]爱民.模糊控制技术[M].西安:安电子科技大学出版社,008.
[5]以伦,姬光青,邱鹏程.液压张紧装置伺服控制系统设计[J].仪表技术与传感器,2016,08):67-70.
[6]载椿.基于模糊PID控制的农用无人机稳定平台控制算法研究[D].浙江大学,2016.
[7]香恩.液压挖掘机节能模糊控制系统研究[D].吉林大学,2004.
作者简介
郭唤唤 (1990-) 女 研究生在读 研究方向:机电一体化方向




共0条 [查看全部] 网友评论