



Abstract: This article is based on Rockwell MICRO850 programmable controller, 1024 ball
screw slider, Kinetix3 servo motor, PowerFlex525 Frequency converter and PVC600 touch screen
and other components. Through the host computer and PLC communication, enter the running
program, set the parameters. The specified position information X is input from the PVC touch
screen, and the servo motor is rotated by driving the ball screw slider so that the object to be
executed will move to the designated position X at the fastest speed with an error of not more than
±
realization of motion control system closed-loop control, has reached the system fast
quasi-stability requirements.
Key words: MICRO800 CCW Motion control
【中图分类号】TK323 【文献标识码】B 文章编号1606-5123(2018)04-0000-00
1 引言
运动控制系统是机电技术的核心组成部分。在印刷,包装,纺织等工业领域运用十分广泛。运动控制系统的精确性,稳定性和快速性至关重要。本文基于罗克韦尔MICRO850可编程控制器,设计了高精准度和高速的行程控制系统。
2 系统硬件架构
2.1 MICRO850平台介绍
MICRO850控制器是罗克韦尔公司全新推出的一款微型PLC。拥有嵌入式运动功能和Connected Components Workbench软件编程、RUT应用项目、和人机界面连接的Ether/IP通信功能。能够根据需要帮助实现更高密度和更高精度的模拟量和数字量I/O。
本系统以MICRO800平台为控制核心,通过RSlink软件建立控制器、变频器和触摸屏之间的以太网通信,利用Connected Components Workbench软件编程对控制器进行编程,以控制伺服电机运动实现丝杠滑块的精准运动。
2.2 运动控制硬件结构组成
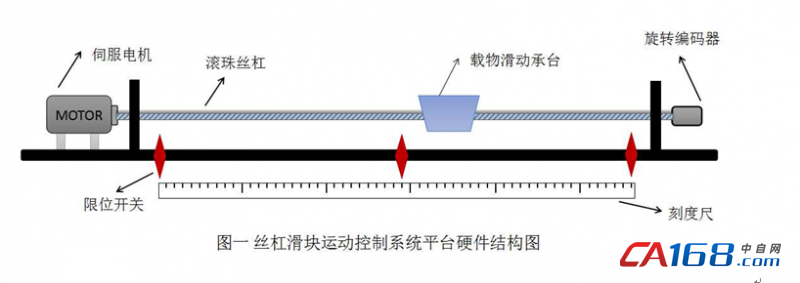
采用1024滚珠丝杠,丝杆直径12mm ,每转动一圈载物滑动承台滑块行进距离4mm ,有效行程为600mm。滚珠丝杠一侧为伺服电机带动丝杠旋转从而实现载物滑动承台在X轴方向做直线运动,另一侧用AB两相增量型光电旋转编码器做位置和速度反馈。丝杠下侧有零点光电开关及终点光电开关传感器信号指示滑块位置;另有1个行程开关可在行程范围内滑动,用于指定特殊位置;两端设有限位开关,超出行程时进行保护。丝杠滑台侧面贴有刻度尺,用于指示滑块位置,精度1mm。
2.3 工业以太网通信的实现
本设计通过路由器组建局域网以太网来实现MICRO800控制器,PowerFlex525变频器,PVC600触摸屏以及上位机之间的通讯,如图2所示。
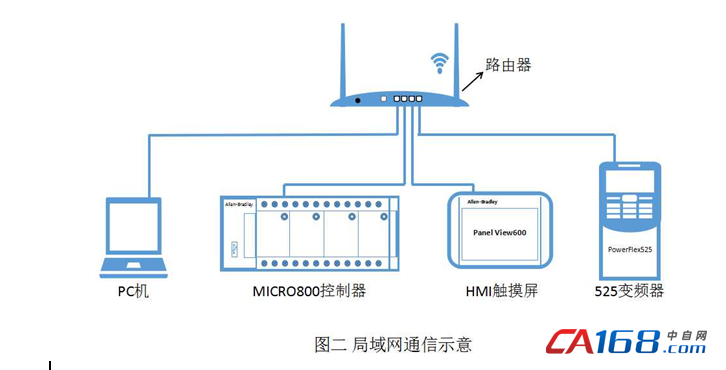
按照图2示意连接硬件后,打开Connected Components Workbench编程软件对变频器和HMI触摸屏进行组态和设置参数。配置完成后,打开RSlink Classic将MICRO850控制器IP地址与变频器IP地址和触摸屏IP地址设置在同一网段内。然后通过编写梯形图控制程序达到控制目的。在触摸屏设置中要分别对触摸屏和PLC建立相对应的标签,进行地址映射。在设置PC机地址时需要将自动获取IP地址设置成手动获取。
3 系统数学模型的建立
3.1 旋转编码器和HSC高速计数器模块
采用AB两相增量型光电旋转编码器做位置和速度反馈,使系统构成闭环控制,仅以提高系统的稳定性。将PTO口脉冲输出口O.00直接接到HSC高速计数器I.00口上,使用HSC计数PTO口的脉冲个数,硬件接完以后需要对编码器脉冲的数字量输入I.00口进行配置方能计数到高速脉冲个数。打开CCW软件,双击Micro850图标,点击Embedded I/O口,将输入0-1号口选为5us,最高可以检测2 0 KHz频率的脉冲信号。
创建HSC模块在CCW中建立一个例程,例程中创建HSC模块,创建相应的变量,并设置初始值,其中HscID选择0,表示选择HSC0计数器,使用Micro850的嵌入式输入口0-3,HscMode设置为2,选择模式2a,即嵌入式输入口I.00作为增/减计数器,I.01作为方向选择位,I.01置1时使用加计数器,置0时使用减计数器。HPSetting设置为100000,表示计数100000个脉冲,如果以每200个脉冲1mm计算,500mm刚好达到HPSetting的值,即移动500mm的距离。
3.2 运动控制功能块
配置好PTO参数后,需要使用运动控制功能快来控制PTO口输出特定频率的脉冲,以适当电动机带动滑块到达指定位置。将驱动器置于Follower模式下,让驱动器跟随PTO口发送的脉冲来运动,因为脉冲个数和频率是可控的,脉冲个数和频率跟运动距离是对应的,通过这种方式实现位置的精确控制。
4 触摸屏人机界面设计
在PVC600配置界面中点击创建,创建一个新的PVC应用程序,然后配置通信,配置PVC标签,进入界面编辑,如图3所示。

在触摸屏控制界面中,具有启动、自动和复位按钮。能够清晰直观的观测运动控制模型滑块的位置、线性转速、电机频率和转速。能够观察电机频率和转速的趋势图。
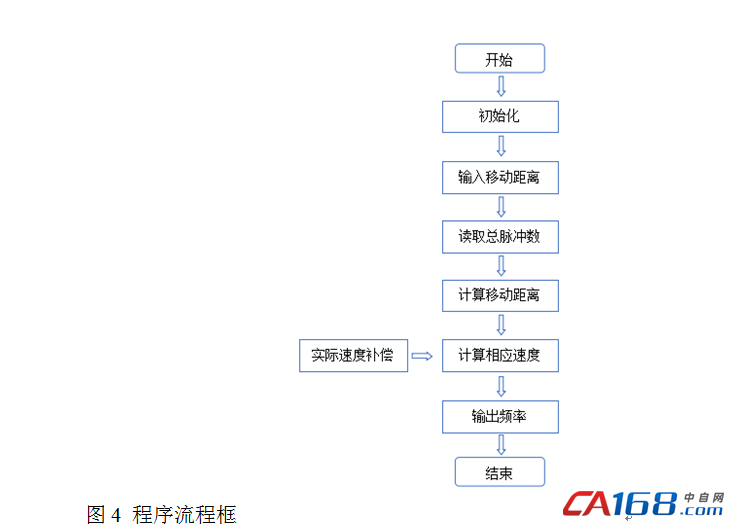
5 可编程控制器的实现
通过Connected Components Workbench编程软件进行梯形图编程。程序流程框图4如下:
5 结束语
本设计能够实现物体在X轴方向上的精确移动与定位,且具有较高的工作效率和稳定性,具有广阔的应用范围。
参考文献
[1]钱晓龙,李晓理.Micro800控制系统.北京:机械工业出版社.2013.
[2]杨耕,罗应立.电机与运动控制系统(第二版)[M].北京:清华大学出版社,2014(03):290-291.
[3]孙纲,张涛.AB变频器及其控制技术.北京:机械工业出版社.2012.
[4]史国生.电气控制与可编程控制技术.北京:化学工业出版社.2010.
[5]付家才.PLC实验与实践.北京:高等教育出版社.2006.
[6]罗克韦尔.AB变频器Power_Flex4说明书.
[7]罗克韦尔.Micro830可编程控制器用户手册.
作者简介
李官云 (1994-) 男 本科在读 研究方向:工业自动化工程






共0条 [查看全部] 网友评论