


Abstract: In order to improve the working efficiency, performance and service life of the metal packing machine, the fuzzy control technology is applied to the control system of the metal packing machine. The fuzzy controller is analyzed and designed, including the fuzzification of inputs and outputs, the selection of membership functions, the establishment of fuzzy control rules, fuzzy reasoning, ambiguity resolution, and the determination of quantization factors and scale factors. The system is simulated by MATLAB/Simulink, and the results show that the control system has fast response, small overshoot and small oscillation, which meet the demand of work load stable of metal baler in the complex working environment, provide the basis for the design of control system of metal packaging machine, and solve the inaccurate problem of control system in the design process.
Key words: Metal packing machine Control system Fuzzy control MATLAB/Simulink
【中图分类号】TH273 【文献标识码】B 文章编号1606-5123(2018)05-0000-00
1 引言
金属打包机广泛用于各种金属边角料、钢刨花屑、废钢、废铁、废铜、废铝、铝刨花屑、解体汽车壳、废油桶等金属原料挤压成长方体、圆柱体等各种形状的合格炉料,这样便于储藏、运输及回炉再利用[1]。但由于目前采用手动控制或采用常规的控制方法已经不能满足金属打包机在复杂工况下工作,因而无法保证在工作过程中金属打包机系统的稳定性,降低了工作效率和使用寿命,所以亟需一种新的智能控制方法对金属打包机控制系统进行改进。
模糊控制FUZZY是利用模糊数学的基本思想和理论的控制方法。在传统的控制领域里,控制系统动态模式的精确与否是影响控制优劣的最主要关键,系统动态的信息越详细,则越能达到精确控制的目的[2]。然而,对于复杂的系统,由于变量太多,往往难以正确的描述系统的动态,所以需要用到模糊控制技术。模糊控制是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术,对于解决金属打包机控制系统具有重大的现实意义。
2 金属打包机恒功率FUZZY驱动
模糊控制实质上是一种非线性控制,属于智能控制的范畴,其核心是利用模糊集合理论,将人的控制策略转化为计算机语言所描述的控制算法,模拟人的思维方式对一些无法构造数学模型的被控对象进行有效控制,从而解决传统控制方法无法或难以解决的问题[3]。对于金属打包机自动控制系统来说,其主要的控制目标是实现打包机的工作负荷稳定,即控制金属打包机驱动电动机的功率恒定。金属打包机模糊控制系统原理框图如图1所示。
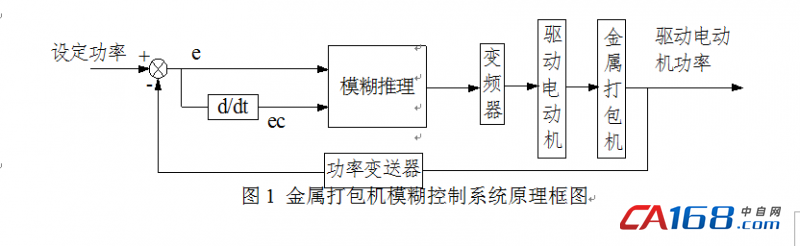
系统通过功率变送器检测金属打包机驱动电动机的功率,将功率信号转换成电信号送入控制系统中,控制系统将设定的功率值与反馈的功率值计算出偏差e以及偏差变化率ec作为模糊控制器的输入值,根据模糊规则进行模糊推理,解模糊运算,得到清晰值,之后对变频器进行控制,改变驱动电动机的转速,从而调整金属打包机驱动电动机的功率,使金属打包机控制系统在恒功率下稳定工作。
3 模糊自调整PID控制器的设计
3.1 输入量和输出量的模糊化
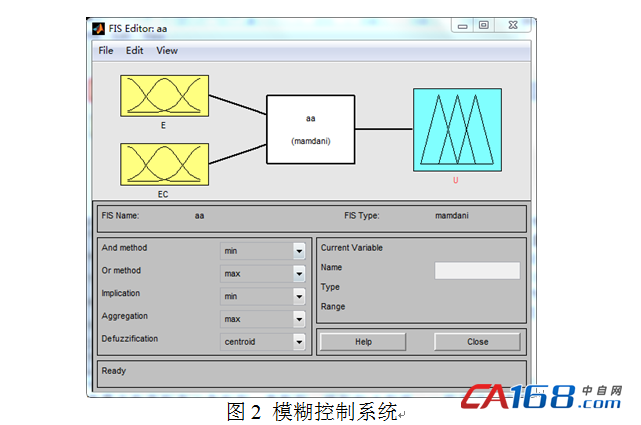
根据金属打包机模糊控制系统原理框图可知,确定系统为双输入单输出的模糊控制器,选择设定的功率值与反馈的功率值之间的偏差e和偏差变化率ec为输入量,实际功率值u为输出量。首先将输入量和输出量通过各自的量化因子转化为模糊论域,输入量e和ec的语言变量为E和EC,输出量u的语言变量为U,其输入量和输出量的基本论域均为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},其模糊子集均为{负大(NB),负中(NM),负小(NS),零(O),正小(PS),正中(PM),正大(PB)},如图2所示。
3.2 确定语言值的隶属函数
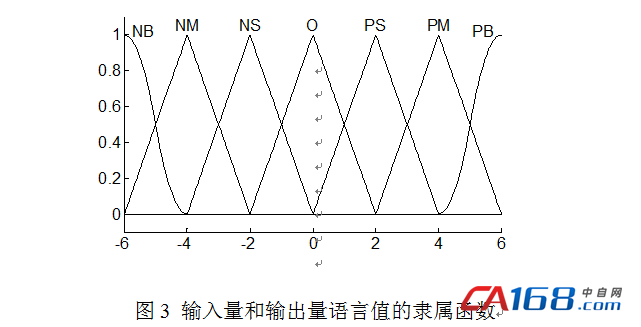
 模糊语言值实际上是一个模糊子集,而语言值最终是通过隶属函数来描述的。常见的语言值隶属函数类型有三角形型、高斯型、梯形和Z型等[4]。一般来说,隶属函数的形状越陡,分辨率越高,控制灵敏度也就越高;相反,若隶属函数的变化很缓慢,则控制特性也较平缓,系统的稳定性较好。因此,在选择语言值的隶属函数时,一般在误差为零的附近区域,采用分辨率较高的隶属函数,而在误差较大的区域,为使系统具有良好的鲁棒性,常可采用分辨率较低的隶属函数。所以,输入量和输出量语言值的隶属函数采用三角形型和Z型,如图3所示。
模糊语言值实际上是一个模糊子集,而语言值最终是通过隶属函数来描述的。常见的语言值隶属函数类型有三角形型、高斯型、梯形和Z型等[4]。一般来说,隶属函数的形状越陡,分辨率越高,控制灵敏度也就越高;相反,若隶属函数的变化很缓慢,则控制特性也较平缓,系统的稳定性较好。因此,在选择语言值的隶属函数时,一般在误差为零的附近区域,采用分辨率较高的隶属函数,而在误差较大的区域,为使系统具有良好的鲁棒性,常可采用分辨率较低的隶属函数。所以,输入量和输出量语言值的隶属函数采用三角形型和Z型,如图3所示。
3.3 模糊控制规则的建立
根据对金属打包机作业过程的观察以及操作者的大量实践经验[5],制定了一系列推理语言规则,如
![]() : If E is NB and EC=is NB then U is PB;
: If E is NB and EC=is NB then U is PB;
![]() : If E is NB and EC is NM then U is PB;
: If E is NB and EC is NM then U is PB;
![]() : If E is NB and EC is NS then U is PM;
: If E is NB and EC is NS then U is PM;
![]() : If E is NB and EC is O then U is PM;
: If E is NB and EC is O then U is PM;
……
![]() : If E is PB and EC is PM then U is NB;
: If E is PB and EC is PM then U is NB;
![]() : If E is PB and EC is PB then U is NB;
: If E is PB and EC is PB then U is NB;
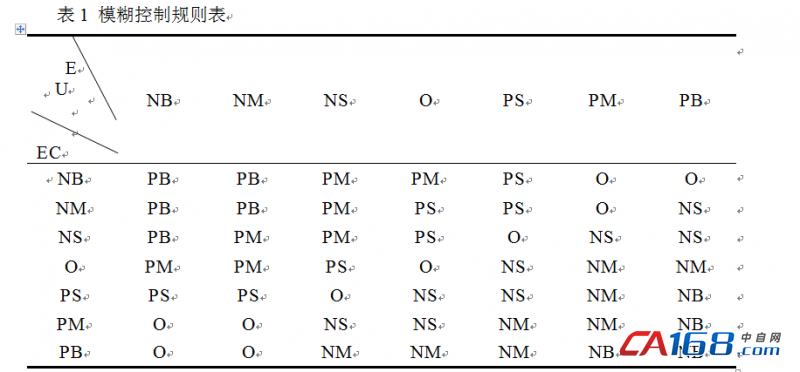
将这49条推理语言规则定义为模糊控制规则表,如表1所示。
3.4 模糊推理
通常把基于不精确的、不绝对清晰的或不完全的信息基础上的推理,称为不确定推理。同时,又把针对模糊系统的不确定性推力方法称为模糊推理方法。因此,模糊推理是一种近似推理,是以模糊条件为基础,它是模糊决策的前提,也是模糊控制规则生成的理论依据[6]。目前所采用的模糊推理方法主要有三种,包括Zadeh推理法、Mandani推理法、Baldwin推理法,本文采用的是Mandani推理法,计算方法如下:

4 模糊控制系统仿真
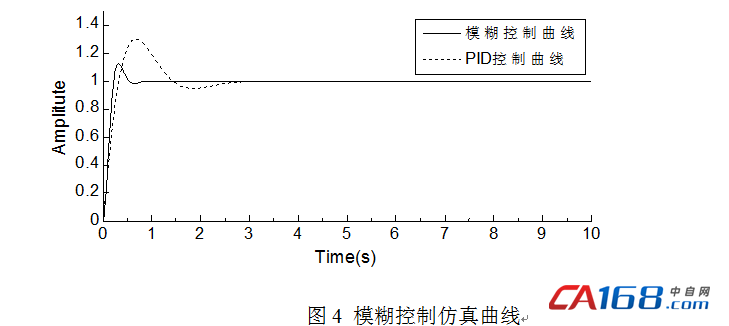
根据上面所述模糊控制器的设计,本系统采用MATLAB提供的模糊控制工具箱,可以很方便地进行模糊控制器的设计,其中包括模糊输入量与输出量的确定、输入与输出范围的取值、隶属函数的选择、模糊推理方法、解模糊方法的选择以及模糊控制规则的添加与修改等。运用SIMULINK仿真平台对金属打包机模型进行仿真分析,由于金属打包机控制系统属于时滞系统,故建立二阶时滞模型对其进行仿真。
为更好地显示模糊控制的控制效果,将其仿真模型同PID控制放在一起,给系统输入单位阶跃信号,仿真时间为10s,仿真结果如图4所示。
5 结束语
针对金属打包机工作环境复杂,控制系统非线性和变参数的时滞性特点,将模糊控制技术应用到打包机控制系统上,运用MATLAB/SIMULINK对控制系统进行仿真,仿真结果表明系统超调量小、响应速度快、振荡小、稳态精度高,有效减少金属打包机的工作负荷波动,提高了工作效率和使用寿命,满足金属打包机在恒功率下工作的控制要求。
参考文献
[1] 金属回收机械基础知识(一) 金属打包机简介[J].再生资源研究,1994(01):33-35.
[2] 诸静. 模糊控制理论与系统原理[M]. 北京:机械工业出版社, 2005.
[3] 郑方峰. 全自动钢管打包机成型系统研究[D]. 沈阳理工大学, 2016.
[4] 席爱民. 模糊控制技术[M]. 西安:西安电子科技大学出版社,2008.
[5] 韦巍. 智能控制技术[M]. 北京:机械工业出版社, 2016.
[6] 马丽娜. 模糊推理方法及知识推理的计量化研究[D]. 陕西师范大学, 2011.
[7] 潘笑天, 禹建丽, 张黎. 基于模糊逻辑推理的铣切削过程稳健参数优化[J]. 河南科学, 2017(10).
作者简介
郭唤唤 (1990-) 女 工学学士 研究生在读 研究方向:机电一体化方向




共0条 [查看全部] 网友评论