
Abstract: This paper designs a kind of energy-saving electromagnetic tracking smart car system, which uses the single chip machine MC9S12XS128 as the kernel control unit. The design of hardware circuit is described emphatically, including microprocessor control module, power soupply module, electromagnetic sensor module, servo control module, motor control module, speed detection module, debugging module. For the features of electromagnetic tracking smart car, the control algorithm based on open loop control and PID control are adopted to control the servo and the motor respectively. The experimental results show that the self-tracking capability of the smart car system is stable and reliable.
Key words: Single chip machine Smart car Self-tracking Electromagnetic navigation
【中图分类号】N945.23 【文献标识码】B 文章编号1606-5123(2018)06-0000-00
1 引言
在工业生产中,工作人员经常需要沿着规定的路线日复一日的进行流水式工作,这种工作会使人产生厌烦心理,导致在作业过程中不专心,存在隐藏的危险,其次则是一些工作场所的环境较恶劣,不适合长时间工作[1]。如今市场上已经有一些用来替代人工的车型机器人,通过自动识别技术,在预设的线路上进行附加作业,解放了人力物力。
随着技术的发展,智能出行、智能电器、智能交通[2]等这些智能技术的应用大大的促进了中国制造业的飞速发展[3]。上述的部分工作可以依附于电磁线和电磁循迹智能车来实现。相对于现有的其他基于光线或影像的循迹技术,电磁循迹的最大优势在于受昼夜及天气等因素影响较小,对外界因素的抗干扰能力也优于基于光线或影像的循迹方式[4],因此在传统的循迹智能车不能满足客户的需求的情况下,我们希望凭借电磁技术的上述优势研发一种节能环保、硬件简单、数据流量小且更加稳定的循迹智能车,最终实现自动化作业模式[5]。
那么如何用智能车代替人来完成流水式工作成为一个重要课题,其硬件电路与算法程序的设计涉及了电磁感应、计算机控制、机械及车辆工程等多个领域。本文综合考虑了制作成本和设计目标,设计了一种电磁循迹智能车系统。该系统以MC9S12XS128单片机作为微处理器,硬件电路主要包括微型处理器控制模块、电磁传感模块、电源模块、舵机控制模块、电机控制模块、速度检测模块和调试模块,算法程序主要包括运用开环控制实现对舵机的控制,运用PID算法实现对电机的控制,最终实现其在电磁线路上自动循迹,以完成人工危险度高或可靠性较弱的附加作业。
2 系统结构
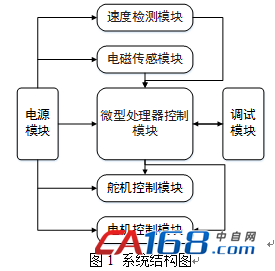
其工作原理为当电磁传感模块对通电闭合铜导线产生感应电势时,通过运放芯片将放大后的电平信号输入给微型处理器控制模块。经过处理后形成PWM波输入给舵机控制模块,进而控制舵机带动前轮进行转向;同时微型处理器控制模块形成的另两路PWM波输入给电机控制模块,进而控制电机带动后轮转动。微型处理器控制模块还另有接口连接速度检测模块,实现速度PID闭环控制。调试模块能实时地显示并调整智能车的各项参数。
3 硬件电路设计
根据系统结构所述,该系统硬件电路设计主要也分为这七个模块:微型处理器控制模块、电源模块、电磁传感模块、舵机控制模块、电机控制模块、速度检测模块和调试模块。
3.1 微型处理器控制模块
MC9S12XS128是16位的单片机,其核心板I/O端口分配为:B0至B7连接给调试模块中的矩阵键盘,J0、J1、J6、J7连接给调试模块的OLED显示屏,T7连接给速度检测模块,P0与P1经过74LS244芯片形成两路PWM波连接给电机控制模块,P5与P6经过74LS244芯片形成一路PWM波连接给舵机控制模块,AD0至AD5连接给电磁传感模块[6]。
3.2 电磁传感模块
电磁传感器模块主要包括感应、选频、放大和检波四个部分。本文中,在智能车的行进路线中心通设一条引导线,导线内通100 mA、20 kHz 的交变电流。首先,感应环节选用8*10 mH 的简单、成本低、体积小、灵敏度高且抗干扰能力强的工字电感,其在通100 mA、20 kHz 的交变电流的直导线电路下,在距地面6cm高度能检测的峰峰值为48 mV左右,能很好满足感应交变电流产生的交变磁场的要求。其次选频的作用主要是过滤其它频率的干扰信号,根据LC谐振并联公式计算,本文采用6.8 nF的电容与之前所述的电感组成 LC并联谐振电路。再者由于电感感应的电动势的量级为毫伏级别,不能被单片机所识别,所以需要经过放大处理,放大电路由运放芯片TLV2772与电位器构成。最后为了能检出波动信号中有用信号,检波电路采用小信号检波的肖特基二极管SS14,便于获得正比于交流线圈感应电压值的直流信号,也便于单片机进行A/D转换[7]。
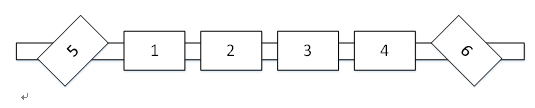
图2 电感分布图
与LC并联电路相连的选频、放大与检波电路如图3所示,共用到3组选频、放大与检波电路,6路信号每2路共用一个选频、放大与检波电路。OUTPUT0至OUTPUT6分别接至单片机核心板的AD0至AD5。

3.3 电源模块
在整个智能车系统中,电源模块贯穿于其中,分别需要有+5V与+12V电压供给。电源模块的设计直接能决定整个系统,因此不仅需要考虑电压稳伏,电流容量等参数,也要注意DC-DC转换效率,降低噪声防止干扰[8]。出于节能环保,本文选用4个串联大电容作为电池。
首先驱动控制模块需要+12V电源供给,本文选用B0512S-1W的DC-DC电源模块,其优点是体积小效率高,无需外加电路隔离性能好。
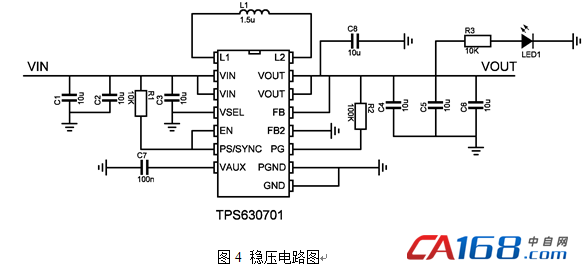
其次处理器控制模块、电磁传感模块、舵机控制模块等需要+5V电压。因为超级电容充放电很快,我们采用TPS630701这块稳压芯片,其具有低静态电流的高效降压-升压转换器,适用于输入电压可能高于或低于输出电压的应用。在升压或降压模式下,输出电流可高达2A,其稳压电路图如图4所示。
3.4 舵机控制模块
由微型处理器控制模块单片机生成P5与P6经过74LS244芯片形成一路PWM波连接给舵机控制模块,舵机三根线分别连接地、+5V和PWM。依据PWM信号,对舵机进行开环控制,实现转向。
3.5 电机控制模块
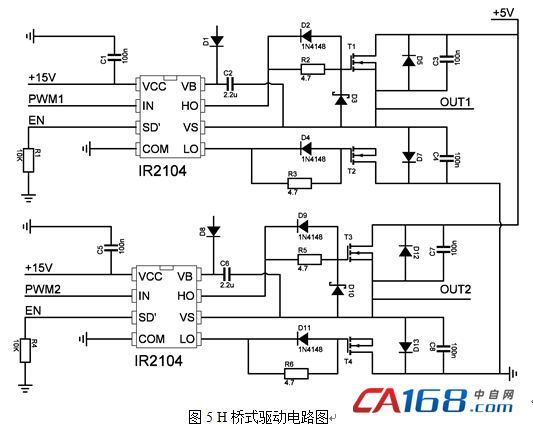
由微型处理器控制模块单片机生成P0与P1经过74LS244芯片形成两路PWM波,与+12V、+5V和地一起连接给电机控制模块, 驱动电路是由2片IR2104芯片构成的H桥式驱动电路[9],其形成两路驱动电流,使电机模块驱动后轮转动。H桥式驱动电路如图5所示。
3.6速度检测模块
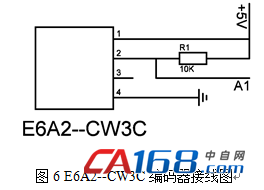
要实现对速度量的闭环控制,就需要实时采集并反馈智能车的速度信息。本系统选用E6A2--CW3C欧姆龙500线编码器来测量车速,具有A、B双相,编码器转一圈产生500个脉冲,其精度高、反应快,且能正反测转速[10],其接线如图6所示。其中A1连接单片机核心板的T7。
3.7 调试模块
调试模块主要由参数显示和参数调整部分组成[11],其中参数显示部分采用OLED显示屏来显示所要参数,而参数调整部分采用的为矩阵键盘,OLED接线图与矩阵键盘接线图如图7所示。

4 算法程序设计
从本文硬件电路设计来看,该系统通过MC9S12XS128单片机提供的PWM调制信号,实现对舵机与电机的控制。因此算法程序的设计也主要包括两部分:舵机控制算法与电机控制算法[12]。
4.1 舵机控制算法
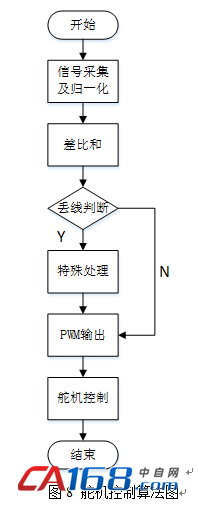
在该系统中,舵机采用开环控制。首先在铺有交流电的跑道上,确定其中线与左右的极限位置,然后在行进中,通过判断智能车与中线偏离的相对位置,来决定舵机转向的角度。在电磁传感算法设计中,“差比和”算法(即用2个电感数据的差除以它们的和)作为一种简单易用的定位算法,适合对归一化的采集数据进行处理。在实际行进中,发现由于传感器前瞻较长,传感器容易出现丢线的情况,所以对此种特殊情况要单独处理[13]。其算法流程图如图8所示。
4.2 电机控制算法
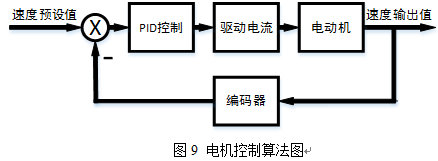
该系统采用了经典的PID算法来实现是对电机的闭环控制。PID控制即比例、积分、微分控制,是当今应用最为广泛的调节器控制。本文通过对编码器测得的偏差计算其相应的比例、积分、微分的值,并线性组合实现闭环控制[14]。在实际调整中发现,适当增大比例系数可以减小调节时间,但容易引起较大的震荡,车速不稳定;而适当增大微分系数可以减小震荡,但会使上升至稳态的时间加长。在经过多次调整后,最后得出了一套适合直道和弯道的PID参数。其算法流程图如图9所示。
5 结束语
本文主要针对电磁循迹智能车的硬件电路设计和算法程序设计进行了研究,以电磁传感作为循迹方式,采用归一化与“比和”策略对舵机实现开环控制,采用传统PID控制对电机闭环控制,最终实现使其能运行在电磁线路上并参加各种作业。通过实际的实验验证,硬件电路设计配合以相关算法程序能达到预期效果,行驶平稳,性能可靠。
参考文献
[1]鲁世斌,蒋先伟,张量等.基于电磁传感器的智能车设计与实现[J].阜阳师范学院学报(自然
科学版), 2014, 31(1): 26-29.
[2]奚晓娜,赵康,唐慧娟等.基于飞思卡尔KL26单片机的电磁循迹智能车设计[J].科技尚品,
2016, (5): 117.
[3]何维,崔传真.基于飞思卡尔杯智能小车的设计[J].黑龙江科技信息,2017, (17): 135-136.
[4]潘明,汪镭,康琦等.基于电磁信号导航的智能车系统设计与开发[J].中国科技论文,2014, (4):
407-412.
[5]赵泓扬,杨建姣.基于MC9S12XS128的电磁循迹智能车控制系统[J].常州工学院学报, 2015,
(4): 25-29.
[6]谢宁,周翔,刘露露等.基于XS128单片机的智能循迹车硬件系统设计[J].国外电子测量技术,
2012, 31(12): 63-66.
[7]刘晋泽, 朱燕红. 电磁导引智能小车的设计与实现[J]. 微型机与应用, 2016, 35(19): 53-55.
[8]林得志,刘齐更.关于电磁智能车电路设计[J].科技信息,2014, (11): 226-228.
[9]吕浩,吕世公,钱焕裕等.用于直流电机驱动的控制算法设计[J].电子测量技术,2010,33(7):
46-50.
[10]孙莹,万秋华,佘容红等.小型光电编码器细分误差补偿法[J].电子测量与仪器学报,2011,
25(7): 605-611.
[11]黄玉水,黄辉,周美娟等.电磁导航式智能车的设计与实现[J].自动化仪表,2014,35(5): 72-76.
[12]摆玉龙,杨利君,董存辉等.基于MC9S128的电磁导航智能车的设计与实现[J].测控技术,
2011, 30(11): 59-64.
[13]刘萍,魏滢,缪斌等.电磁组智能车控制策略探讨及实现[J].四川理工学院学报(自然科学版), 2016, 29(2): 19-24.
[14]师宁,季君,邱利军等.基于PID控制算法的电磁车设计系统[J].山西电子技术,2017,(4):
13-16, 23.
作者简介
秦 磊 (1997-) 男 工学学士 研究方向:工业自动化专业




共0条 [查看全部] 网友评论