



Abstract: A rotary transformer interface card based on ADS1210 chip RDC will be introduced. On the basis of explaining the principle of resolver and the RDC decoding principle, the hardware design and the software function of the interface card are detailed. At present, the interface card has been successfully used in the motor speed closed-loop control and the measurement of retractable cable length as the speed and angle encoder.
Key words: Resolver; AD2S1210; Shaft encoder
【中图分类号】TM383.2 【文献标识码】B 【文章编号】1561-0330(2018)03-0000-00
1 引言
在电机驱动行业,轴角编码器的应用非常广泛,常应用于电机的闭环控制和运动长度的计量。其中旋转变压器(后面简称旋变)作为其中的一种,具有精度较高、稳定可靠、抗震等级高、环境适应强等优点,已广泛应用在机床、港口机械和汽车电子等领域。但旋变输出的是模拟量电压信号,需要轴角编码成数字信号才能被使用。轴角编码主要有两种方法:一是结合硬件调理电路,利用单片机或FPGA运行轴角转换算法计算轴角;另一种是直接使用专用轴角数字转换芯片(RDC)。第一种方法成本低廉、实施灵活、实用性强,但存在转换精度不高、开发周期长和电路复杂等缺点。而RDC芯片以精度较高、外围电路简单等优点被广泛的应用于旋变的轴角转换。目前美国AD公司和日本多摩川公司的RDC产品应用最为广泛。
同时,在单个变频器分时控制多个带旋变的电机场合,长距离旋变模拟量线路容易受干扰、接线多且繁琐。为了克服此问题,本文基于AD公司RDC芯片AD2S1210和ST公司ARM芯片STM32F103VC,设计了一款可使用RS485通信总线读取旋变轴角信息的接口卡。
2 旋变和AD2S1210的工作原理
2.1 旋转变压器的工作原理
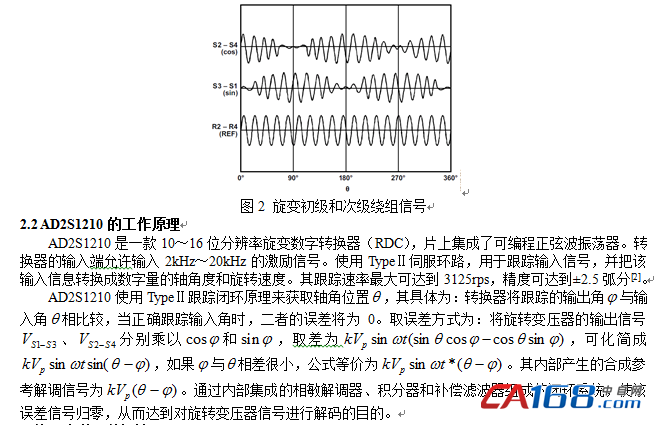
如图1所示为一个经典旋变结构[[i]],该旋变的初级绕组(也可叫激励绕组)位于转子上,两个次级绕组则位于定子上。转子上是激励绕组R1-R2,由激励源提供激磁信号;2个次级绕组机械错位90°,由于转子的特殊设计,次级耦合随着角位置变化而发生正弦变化,产生由轴角的正余弦调制出的2个输出电压(S2-S4,S1-S3),即旋变的各绕组电压计算公式如公式(1)所示。

3 接口卡的硬件设计
3.1 硬件系统构成
接口卡的硬件框图如图3所示,其主要包含电源部分、STM32F103VC部分、AD2S1210外围电路部分和RS-485通信电路部分。
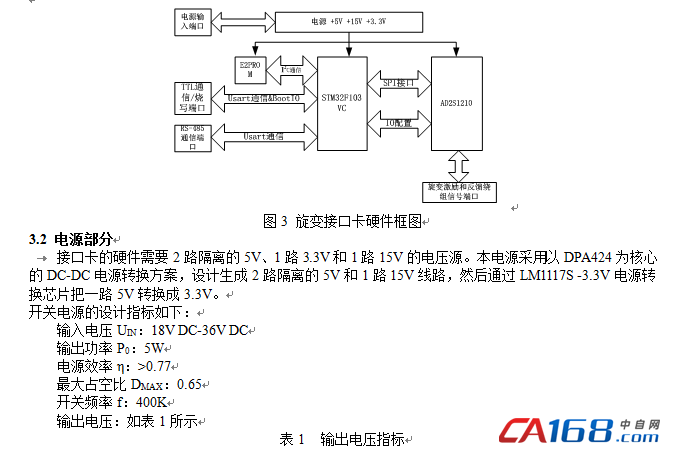

3.4 STM32F103VC部分
STM32F103VC是ST公司生产的一款高性价比MCU,主频72MHz、256KB flash、48KB RAM;该处理器在本系统中的作用有:
(1)设置AD2S1210成配置模式,通过SPI或并口通信读取AD2S1210的4种信息,分别是角位置、角速度、故障寄存器数据和片内寄存器数据。同时通过设置AD2S1210分辨率管脚电平来设置轴角编码的分辨率。
(2)通过TTL串口连接手持操作器或上位机系统,并根据手持或上位指令来修改运行参数,同时把设定的参数存入E2PROM;或上传监视状态给上位机,用于绘制状态变量波形。
(3)监视RS-485通信接口命令,根据给出的命令,回复不同旋变信息。
旋变接口卡软件需要支持以下几个功能:
(1)设定接口卡站号
接口卡适用于一拖多的场合,即多个接口卡挂在同一RS-485总线,故需给每个接口卡定义一个站号,用于区分和读取不同电机的转动信息。指令发送者为主机,接口卡为从机,它们之间的通信采用一问一答的方式。本接口卡支持两种站号设定方式:一种通过外部开关设定;另一种为参数设定。前者优点为设置快且形象,缺点为设定站号数量有限,由于设置开关只有3位,所以最多只可以设置8个不同的站号。后者优点为可比前种方式配置更多站址,缺点为需要使用上位系统进行设定和查看。
(2)快速传输轴角信息
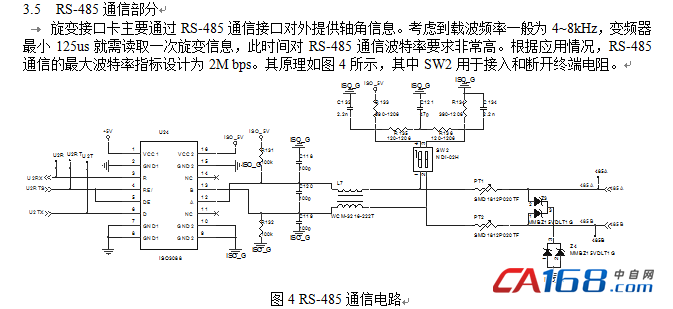
旋变通常被用于反馈旋转机构的角度和速度。例如安装在电机轴上,用于测试电机的旋转速度和转子电角度,变频器通过读取这些信息进行电机控制。变频器在控制电机时,对读取的电机角度和速度准确性要求很高,角度越准确,控制性能就越好,所以准确的获取角度和位置信息非常关键。由于采用半双工的RS-485通信,在收发完数据包后,需及时把RS-485接口芯片设置为接收模式,如果主或从设备在未设置为接收模式前,对方已经发送信息,则此数据包将会被丢弃。这将延长轴角信息的获取时间,角度和速度的准确性和实时性变差,整个系统的控制性能受到影响,综上所述,保证RS-485通信的传输速度非常关键。
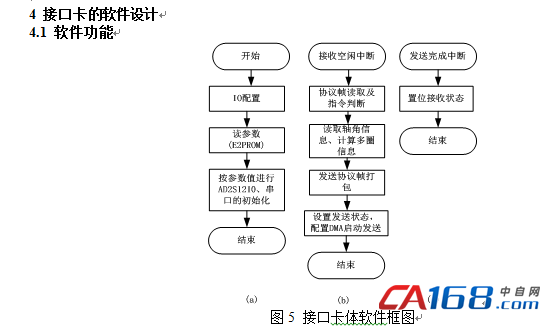
由于MCU采用ST公司的STM32F103VC,使用串口的空闲中断、发送完成中断和串口DMA传输能很好保证传输的实时性,软件处理框图如图5所示。主机(发送读指令的上位机,以下简称主机)给从机(回复指令的接口板,以下简称从机)发送数据,当数据发送完成后,产生发送完成中断,主机再把RS-485接口芯片的收发控制信号置为接收状态;从机在接收主机通信信号后,若延迟一个字节时间后没有继续接收到主机数据,从机将产生接收空闲中断,从机从AD2S1210中读取旋变的角度、速度和故障寄存器信息,读取完成之后打包发送给主机,当数据发送完成后,产生发送完成中断,从机把RS-485接口芯片的收发控制信号置成接收状态。从机及时回复主机指令,才可保证轴角信息的精准性和实时性。
(3)提供多圈轴角编码信息
由于接口卡读取的旋变信号为单圈绝对值信息,在计长场合,需使用多圈轴角信号。该多圈信号可通过对单圈绝对值信号进行累加得到,目前有两种方案进行多圈位置信号的累加:一种是放置在上位系统里进行累加;另外一种是放置在接口卡里进行累加。正确累加多圈长度信息的关键在于读取位置信息的最小时间要大于旋变转动180度电角度的时间。使用第一种方案,旋变的最大旋转速度取决于通信的速度、频度及最大持续丢包的时间;使用第二种方案,旋变的最大旋转速度取决于读取AD2S1210的速度。由此可知,在接口卡里累积多圈信息较为稳妥。每次读取AD2S1210角度寄存器后进行多圈信号的计算。
(4)AD2S1210的轴角分辨率可设
不同场合对旋变的工作速度要求不同,由于AD2S1210轴角转换芯片的分辨率同旋变的旋转速度成反方向变化趋势。即需要单圈信息的分辨率高,则旋变的最大工作速度就不能很快;同理,降低分辨率便可获得更高的旋转速度。由于该接口卡可用于不同转速的转动机构,所以需要具备分辨率设定功能。软件根据分辨率参数的设定值,改变AD2S1210配置管脚的电平状态,进行分辨率的设定。
4.2 试验结果
图6(a)为接口卡实物,(b)为使用接口卡进行速度闭环的测试平台。本测试平台使用接口卡读取电机轴端的旋变信息,变频器通过RS-485通信读取接口卡采集的轴角信息,并使用该信息进行速度闭环控制。
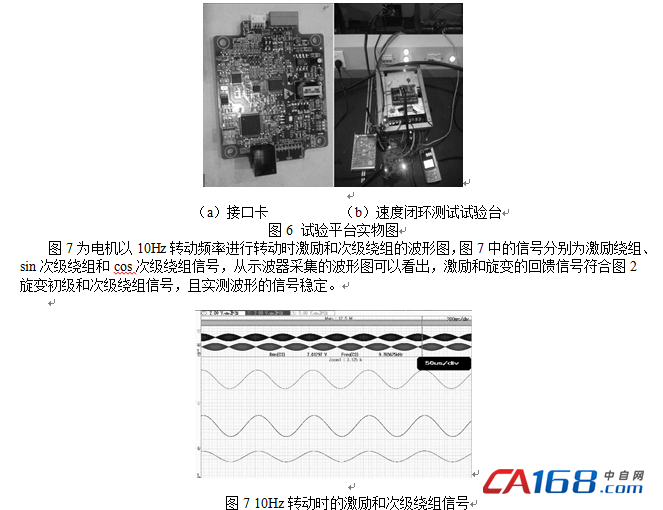
图8和图9所示分别为波特率等于2Mbps和1Mbps时,RS-485串口通信的收发信号及收发控制信号的波形图。由图可见,主机和从机之间通信一次的时间分别为78μs和132μs左右,可以很好的应用于变频器6~8kHz载波控制电机的场合。收发控制信号能及时准确的按需求进行控制,收发信息之间的延迟时间基本相等。
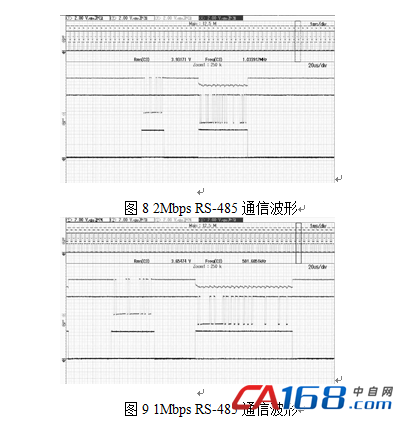
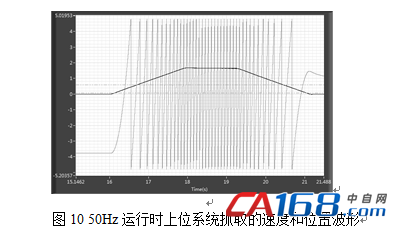
图10所示为电机从0Hz加速到50Hz,再减速到0Hz时,接口卡采集的速度和位置信息的波形图。该波形图通过新时达上位机软件进行抓取。从图中可见速度信号和位置信号的波形无明显突变和毛刺,电机转动非常的平稳。接口卡提供的位置信息准确、及时。
5 结论
本文对旋转变压器和AD2S1210数字转换器的工作原理进行了分析,并介绍了接口卡的软硬件设计方案。本文提供的实施方案可快速、准确的采集转动轴信息,满足变频器闭环控制电机场合对编码器准确性与稳定性的要求,满足绳缆收放长度计量的要求,具有较高的实用价值。






共0条 [查看全部] 网友评论