



Abstract: At present, many PV systems are based on a fixed type. This system has low power generation efficiency. If it can make solar panels to automatically track the sun, the energy absorption rate of the panel can be increased by 35%.In order to improve the energy absorption rate of solar panels, a solar tracking system based on DELTA AH500PLC has been designed. This design has achieved the purpose of automatic tracking of the sun. It can be applied independently of solar power generation equipment, and has a good prospect for industrial application.
Key words: Solar energy; PLC; Tracking systems; Surveillance systems
【中图分类号】TM301 【文献标识码】B 【文章编号】1561-0330(2018)04-0000-00
1 引言
20世纪,太阳能利用技术获得了迅猛的发展,太阳能热水器的普及以及太阳能电池的成功开发,为21世纪大规模利用太阳能奠定了坚实的物质基础[1-2]。
世界各国从能源供应安全和清洁利用的角度出发,把太阳能的商业化开发和利用作为重要的发展趋势。自20世纪80年代以来,光伏产业可以说是世界上增长最快的高新技术产业之一[3]。本设计基于台达AH500 PLC的太阳能跟踪系统。其中包括机械设计部分、电气设计部分和监控系统设计。机械设计部分主要是通过CAD绘制硬件三视图,设计出一个简易的机械执行装置。电气设计部分采用光敏传感器,间歇性四个方位比较太阳光线强度,从而判断出太阳的位置,然后经过PLC的软件部分处理后,PLC驱动步进电机转动支架,使太阳能电池板能够在大部分时间处于阳光直射下,大大的提高了太阳能发电板的发电效率。
2 系统方案设计
跟踪太阳的方法主要有光电跟踪和视日运动轨迹跟踪两种,前者是闭环的随机系统,后者是开环的程控系统[4]。前者的系统对不同地区中的数据处理较为繁琐,需要对当地的条件进行准确的分析,并且灵活性很差,当阴雨天气的时候完全不需要再按照阳光既定轨迹运动,而后者中所具有的缺陷可以用程序去完善和弥补,因此本系统选择了开环的控制系统,即为光电跟踪系统。
光电跟踪系统以光电传感器为基石,目前常见的有四象限传感器等[5]。当太阳往西边移动时,相对应的两个光敏电阻电路将会因阳光强度的变化而出现电流差,经过电压比较电路进行电压对比后,输出不同的电压信号,再由控制芯片驱动电机旋转机械执行机构调整电池板的面向方位使跟踪装置能正对太阳完成实现自动跟踪功能。光电跟踪系统灵敏度高,但是受到外界干扰光源等因素的影响很大,如果天气不好,没有太阳出现,那么跟踪装置将会没有规律的乱动,甚至可能会引起执行机构的损坏。
本文所设计的系统是以PLC为控制核心的闭环运行系统,光电传感器可实时检测太阳方位,检测到太阳方位变化时,PLC收到的信号立即发生变化,然后通过PLC控制电机机构转动机械装置,使阳光正对太阳能电池板。系统的总体方框图如图1所示。
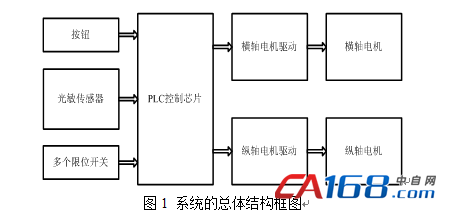
其中,PLC作为主要核心控制芯片,在收到传感器送过来的信号后,正确的控制两台电机转动。两台电机作为机械装置的直接施力对象,一台控制太阳能发电板支架机构横向旋转,另一台控制太阳能发电板纵向旋转。
3 系统硬件设计
3.1 电机的选择
本系统在对光源进行采集处理后,调整面板面对太阳,在实际的应用过程中,每次调节完面板,将会延时一段时间,当太阳相对位置有明显变化的时候,将再次调节面板方位,因此,无需控制精度非常高的伺服机构,虽然伺服机构能够使本系统更加完善,但是考虑到其经济性以及实用性,步进电机是一个很好的选择。
因此选用的步进电机为两套两相四线制步进电机,按照尺寸分为42步进电机和57步进电机,42步进电机实物如图2所示。57步进电机实物如图3所示。
本次步进电机所选用的驱动器型号为TB6600,此款步进电机驱动器是一款比较专业的电机驱动器。通过S1,S2,S3三位拨码开关选择6档细分控制(1、2、4、8、16、32),通过S4,S5,S6三位拨码开关选择8档电流控制(0.5A、1A、1.5A、2A、2.5A、3A、3.5A、4A)。适合驱动86、57、42、39型两相、四相混合式步进电机。驱动器具有噪音较小,运行平稳的特点。所选用的驱动器如图4所示。

输入信号接口有两种接法,分别是共阳级接法和共阴极接法。由于本设计是以PLC为控制核心芯片,输出信号为正,因此采用共阴极接法。分别将PUL-,DIR-接地,PUL+和DIR+分别接脉冲信号和方向信号,如果信号电压是+5V,则可以直接接入,如果电压信号大于5V,则需要外部另加限流电阻R,保证给驱动器的驱动电流不至于过大而烧坏驱动器。当电压信号为12V时,串入一千欧电阻,电压信号为24V时,串入两千欧电阻。ENA为电机脱机功能,由于本系统需要在运行的时候电机不因外力而转动,因此,需要电机通电抱死,ENA悬空。共阴接线示意图如图5所示。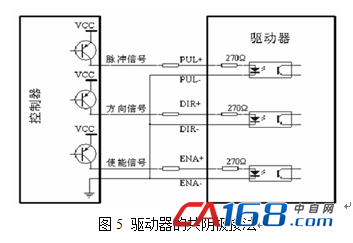
3.2 传感器的选择
本设计利用光敏传感器对光信号进行采集,并且转换成电信号后比较电压值的大小,作为一种开关信号输入PLC,因此,选用光敏电阻即可。
光敏电阻作为开关式光电信号传感元件被广泛应用在自动化技术中,它是一种利用光敏感材料的内光电效应制成的光电元件。它具有精度高、体积小、性能稳定、价格低等特点。光敏电阻的实物图如图6所示。

光敏电阻是由光电半导体构成,使用时需要在两个电极上施加电流或者电压。在没有受到光照的情况下,光敏电阻阻值很高,整个电路回路中只有微弱的暗电流通过。当有光源照射它时,光敏电阻的阻值就会降低,电路回路中的电流增大,暗电流将变成亮电流。当光源消失,光敏电阻的阻值又会增大,回到高阻态,电路回路中的亮电流又会编程微弱的暗电流[6]。
3.3 可编程控制器的选择
3.3.1 可编程控制器的介绍
可编程逻辑控制器有很多品牌,其中较为常用的有德国的西门子(SIEMENS)公司,美国罗克韦尔(Rockwell)自动化公司所属的A-B(Allen & Bradly)公司,GE-Fanuc公司。法国的施耐德(Schneider)公司,日本的三菱(MITSUBISHI)公司和欧姆龙(OMRON)公司[7-8]。本实验中选用台达集团生产的AH500中型可编程控制器。
台达DVP系列可编程控制器以高速、稳健、高可靠度应用于许多工业自动化机械上;除了具有快速执行逻辑运算、丰富指令集、多元扩展功能卡及高性价比等特色外,并且支持多种通讯规范,使工业自动控制系统联成一个整体。其结构如图7所示。

3.3.2 扩展模块分类和选用
AH500 PLC的模拟量扩展模块有很多型号,如AH32AN02P-5A入12位精度、AH32AN02P-5B出12位精度、AH16AM30N-5A入/1出12位精度、DVPAETB-ID32A接口模块等。本设计一共需要四个模拟量输入,选用其中4个输入的一种即可,即选用AH32AN02P-5A模拟量扩展模块。
3.4 I/O分配
根据系统选用的I/O外部设备,输入设备中,四个接近开关一共有四根数字开关信号线,需要四个输入端口;输出设备中,两个步进电机驱动器分别需要一个脉冲数字信号和方向电平信号,ENA通电抱死,无需接入PLC,因此一共需要四个输出端口Q;添加两个带指示灯按钮作为系统的开始和复位功能,分别需要两个输入口和两个输出口,因此,本系统一共需要分配6个输出端口和6个输入端口,其I/O分配具体情况如附表所示。

3.5 机械执行装置设计
考虑选用金属材料。可以选用的金属材料有两种:铝和铁。这两种金属都是最常见和常用的机械机构材料。
选择铝板并且打好孔后,先搭好底座,底座中间需固定一根直径为20mm的光轴,光轴长度为550mm,光轴中间固定一个带轮转盘,带轮装置大孔内径略大于20mm(便于嵌套光轴),小孔内径略大于8mm(57步进电机出轴轴径为8mm),轴距250mm;带轮由固定在底座右内壁上的57步进电机带动转动;带轮大孔的一边固定在20mm的光轴上,光轴上下由三个带壳的轴承支撑光轴以及上部转动机构。铝板之间全部用角码连接件固定。固定好的底座上再接上4快铝板、一根轴径8mm并且焊接了面板(模拟太阳能电池板)以及若干角码连接件,再将传感器固定在可转动的铁板上。
4 软件设计
4.1 系统软件功能
STEP7-Micro/WIN V4.0编程软件是一款常用台达AH500PLC编程软件,该软件功能非常完善,能方便地根据控制系统的要求进行各种编制操作控制程序并且完成与PLC的实施通信,进行程序的下载与上传以及在线监控[10]。
4.2 程序流程设计
程序主要的以下几个部分:
4.2.1 上电复位
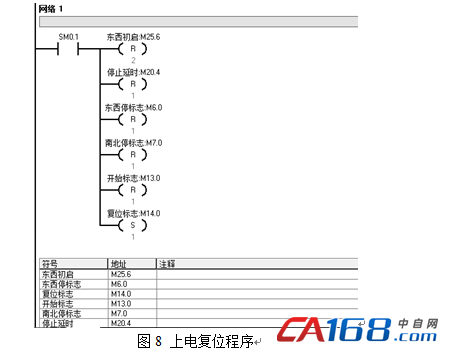
上电复位用于在系统每次上电时,将系统上一次工作时闭合的继电器断开,防止系统再次上电后,继续之前的工作而产生干扰。程序如图8所示。
4.2.2 启动
启动部分用于控制整个装置的开始,若不按下开始按钮,则系统不会工作,即使有再强的光在附近,也不会调节面板,程序如图9所示。

4.2.3 模拟量信号输入部分
模拟量信号输入部分用于收集光敏电阻所采集周围光照强度的对比值,假如东边光照比西边强,则东边对应的模拟量输入为最大的10V电压信号,通过模拟量转化后的值理论上为最大的32000,但实际测量转化后的值总是偏大于32000这个值,因此,可以将比较值设置为32000。
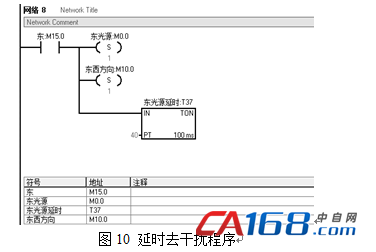
4.2.4 延时去干扰部分并且确定方向
在实际光信号采集过程中,总会遇到其他光源的干扰,因此,当采集到光信号的时候,需要添加一个定时器,延时判断光源是否一直存在,无论最后有没有驱动电机转动,只要有一边光强发生了变化,那么电机的转向也将跟着发生变化,保证电机转动前,方向已经确定好。部分程序如图10所示。
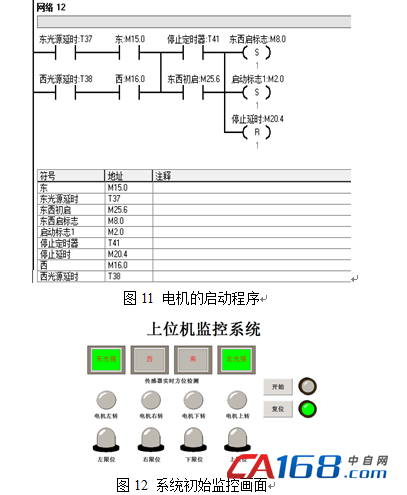
4.2.5 电机的启动部分
由于电机可以向两个方向转动,而一次只能向一个方向转动,因此,在控制电机启动程序里,并联了两个方向转动的控制程序,每个方向控制程序包括定时器延时判断继电器和延时后,光源是否在一直存在的光源标志继电器。部分程序如图11所示。
4.3 实验调试过程
进入ForceControlV7.0软件,建立新的工程,新建好窗口后,先选择需要连接的PLC的类型,在设备配置中设置好I/O接口和数据库的组态。将写好的程序下载到PLC的CPU里面去以后,将力控组态软件与PLC实现通信,进行最终的调试。
系统通电,上位机监控界面开始显示传感器测得的光强对比信号,且复位指示灯亮,等待开始。监控界面如图12所示。
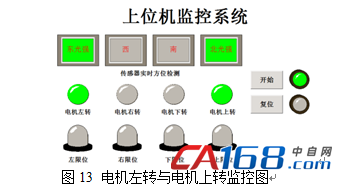
按下“开始”按钮后,复位指示灯熄灭,开始指示灯亮,系统启动,电机开始向东和北两个方向转动,同时电机左转与电机上转指示灯亮,如图13所示。
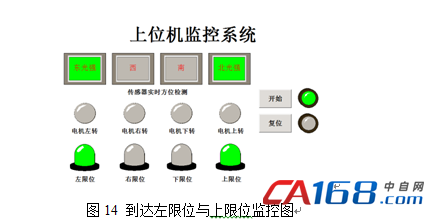
此时的光源位于机械执行装置的东上方,因此,电机会一直转到限位停止,当电机到达限位时。监控界面中电机左转和电机上转指示灯熄灭,左限位与上限位指示灯亮,监控界面如图14所示。
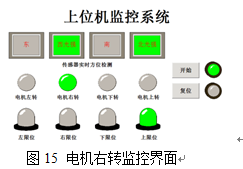
此时,用手遮住双轴跟踪传感器东边的光敏电阻,系统延时判断后,电机驱动机械执行装置往西边转动,而南北两个方向不动作。同时,监控界面中,东光强指示灯熄灭,“东光强”变为“东”西光强指示灯开始闪烁,“西”变为“西光强”。左限位指示灯熄灭,电机右转指示灯亮,监控界面如图15所示。
当手离开传感器后,电机停止,系统延时判断后,电机又驱动机械装置向东旋转。监控界面中,西光强指示灯灭,东光强指示灯闪烁,电机右转指示灯灭,电机左转指示灯亮。
至此,本系统的调试工作已经完成,系统已经可以正常工作。
5 结论
太阳能作为一种新型的清洁能源,具有极大的优点,受到世界各国的重视。本文采用台达AH500PLC为控制核心,其控制功能强大,可以实现对太阳能智能双路系统的跟踪,并能充分发挥PLC高可靠性的优点。经过调试,稳定可靠,合闸精度,因此广泛应用于工业领域。
参考文献
[1]D.Johnston. Solar energy systems installed on Chinese-style buildings [J]. Energy and Buildings, 2007,39(4):385-392.
[2]刘鉴民.太阳能利用原理技术工程[M].北京:电子工业出版社, 2010:17.
[3]魏学业,王立华,张俊红,等.光伏发电技术及其应用[M].北京:机械工业出版社, 2013:12.
[4]郑小年,黄巧燕.太阳跟踪方法及应用[J].能源技术, 2003,(24):149-151.
[5]高峰,孙成权,.刘全根.太阳能开发利用的现状及发展趋势[J].世界科技研究与发展, 2001,23(4).
[6]张洪润,孙悦,张亚凡.传感技术与应用教程[M].北京:清华大学出版社, 2008:15.
[7]廖常初. S7-200 PLC编程及应用[M].北京:机械工业出版社, 2007:45.
[8]Salah Abdallah. Two axes sun-tracking system with PLC control [J]. Energy Conversion and Managemeny, 2004,45:1931-1939.
作者简介
陶珩 (1993-) 男 硕士 研究方向为控制工程






共0条 [查看全部] 网友评论