



Abstract: Put forward a kind of PWM rectifier control method for PR without AC current sensor,alternating current by detecting the switch state and reconstruct current dc current gain, Minimum modulation time compensation control to ensure that the correct reconstruction of alternating current. Rectifier using space vector PWM current control,control system adopts voltage outer loop PI control and current inner loop control structure PR,research shows that the control strategy has good control performance and can realize net side current sinusoidal and unit power factor operation.
Key words: Rectifier; PR control; No AC current sensor
【中图分类号】TM461 【文献标识码】B 【文章编号】1561-0330(2018)06-0000-00
1 引言
2 三相PWM整流器数学模型
三相PWM整流器拓扑结构如图1所示。

图1 三相整流器主电路拓扑结构
可以采用开关函数描述其数学模型,利用基尔霍夫电压定律推倒交流回路电压方程为[5]:

3 PWM整流器交流电流重构
由式(4)可知,母线电流可以通过开关状态与网侧交流电流联系起来。反过来,若母线电流已知,且三相桥的开关状态确定,则网侧某相电流可以构造出来。

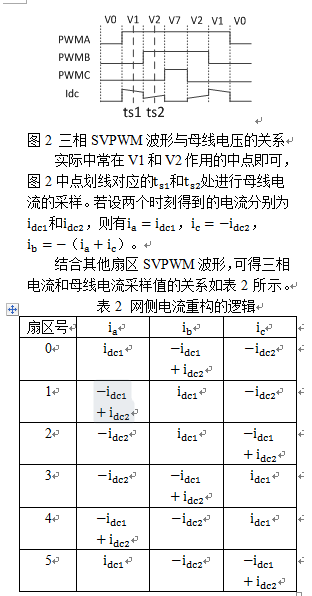
在SVPWM调制方式中,任一个开关周期中的电压矢量均由两个有效基本电压矢量的线性时间组合来合成,因此在一个开关周期中能够重构出两相电流,进而实现三相交流电流的重构。现以第0扇区为例说明。当参考电压矢量处于第0扇区时,两个有效的基本电压矢量V1、V2和插入的零矢量分成七段作用,三路SVPWM波形和母线电流的关系如图2所示。

联立式(10)(11)(12)式,即可实现三相PWM整流器交流电流侧相电流的重构。同理,上面的分析可以用到其他5个扇区。
4 最小调制时间
对于此重构技术,要使直流侧电流采样值可以有效的重构三相交流电流,飞零电压空间矢量作用的最小时间必须大于最小时间![]() 以保证正确检测
以保证正确检测![]() 。
。![]() 称为最小矢量作用时间。对于这个三相整流系统,最小矢量的作用时间是PWM死区时间,电流采样及AD转换时间保持时间和IGBT驱动电路延时之和。
称为最小矢量作用时间。对于这个三相整流系统,最小矢量的作用时间是PWM死区时间,电流采样及AD转换时间保持时间和IGBT驱动电路延时之和。
图3中的阴影部分标出了无法准确测量相电流的区域,当参考电压矢量处于该阴影部分时,至少存在一个非零电压空间矢量的作用时间过短,不能满足大于最小调制时间的要求,因而无法获得准确的相电流。
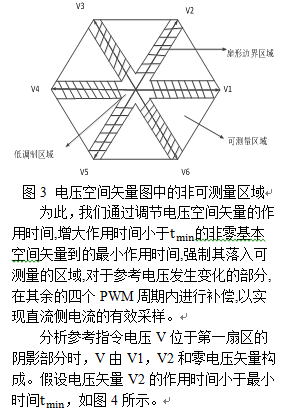

这样就可以保证参考电压矢量在任何区域都可以对直流侧电流有效采样,正确的进行PWM交流侧相电流的重构。
5 无交流电流传感器的PWM整流器谱PR控制策略
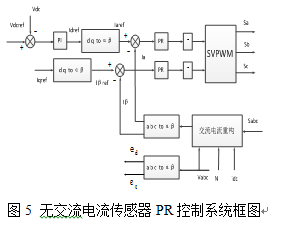
图5为整个控制系统的框图,网侧电流重构的电压定向矢量控制方案,省略了网侧电流传感器,进而降低了系统的成本。用PR控制器代替传统的PI控制,减少了坐标旋转变换,且不存在耦合项和前馈补偿项,改善了PI控制器只可以实现对直流量的无静差调节,而对交流量来说,只能实现有差调节的问题。同时提高了谐波抑制能力。
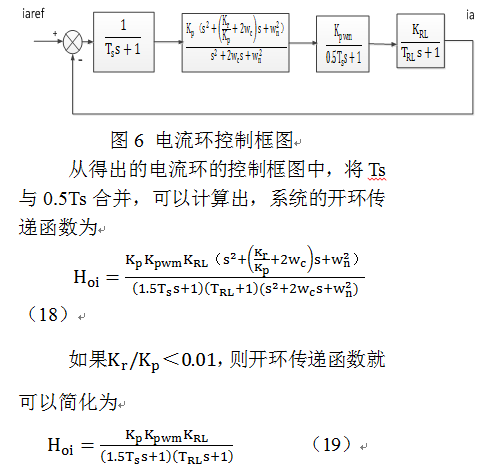
下面介绍PR控制器的参数设计。以两相静止坐标系下的a轴为例,可以得出电流环的结构框图如图6所示[6]。
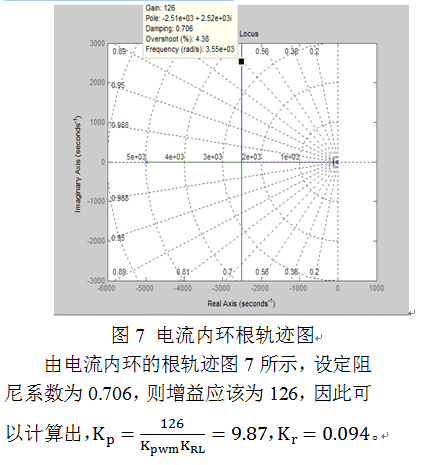
系统采样时间Ts=0.0002s,交流侧电阻R=0.083Ω,交流侧电感为5mH,由此可绘制出电流内环的根轨迹图。
6 仿真结果分析
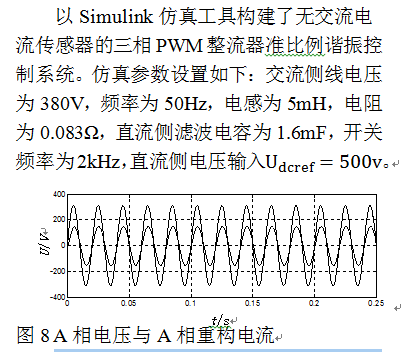
图8为三相电压与三相重构电流波形。图8表示整流器A相的电压和A相重构电流,从图8中可以看出,电压和电流的相位相同,因此可以实现单位功率因数控制。
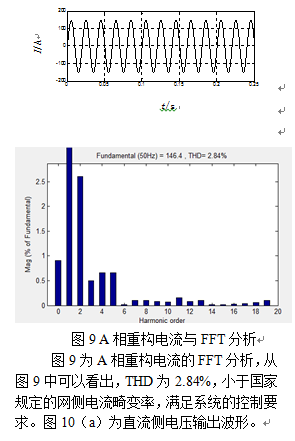
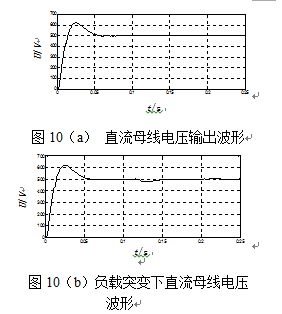
从图10(a)可以看出电压输出超调量小,动态响应速度快,图10(b)表示负载电阻在0.5s突变为原来的一半后直流母线电压的动态响应,可以看出母线电压很快恢复到500V。由此可以看出无交流电流传感器的三相PWM整流器PR控制策略可以是整个系统稳态运行。
7 结语
本文提出了无交流电流传感器与两相静止坐标系下PR控制相结合的三相整流控制策略,节约了成本同时准确的跟踪了指令信号,网侧电流谐波含量少。最后用Matlab/Simulink实现了该控制策略的仿真,仿真结果验证了该方案的可行性。
参考文献
[1]訾振宁,林飞,马颖涛.PWM整流器无电网电压传感器控制策略研究[J].电气传动,2009.39(10):27-30.
[2]Ohnuki T, M iyashita O, Lataire Phetal.A three-phase PWM rectifier without voltage sensors[C].in Proc. EPE,97,Norway,1997:881-886.
[3]何新亮.基于虚拟磁链的PWM整流器内膜控制研究[D].中南大学,2014.
[4]赵新.电励磁直驱风力发电机并网控制技术研究[D].北京交通大学,2014.
[5]赵仁德,贺益康.PWM整流器虚拟电网磁链定向矢量控制仿真研究[J]. 电力系统及其自动化学报,2005.17(5):94-98.
[6]宋玉廷.三相PWM整流器控制策略研究[D].中国矿业大学,2015.
作者简介
刘晨 (1992) 男 硕士研究生 研究方向为光伏并网逆变器






共0条 [查看全部] 网友评论