随着科技的发展,传统的直流电机已经不满足实际生产所需,在此基础上,无刷直流电机被研制出来,但由于该电机存在了一些非线性、时变性等特点,导致在控制过程中,常规的PID控制难以达到理想的控制效果。本文将智能的PID控制技术应用于直流电机的控制,以便获得最佳的过程响应曲线。本文简述了无刷直流电机的工作原理和PID控制原理,分析了模糊控制,设计出模糊PID控制器。最后对模糊PID与常规PID控制进行了仿真,仿真结果表明前者效果更佳。
关键词:无刷直流电机;智能控制;PID;模糊PID;
Abstract: With the development of science and technology, the traditional DC motor has not met the needs of actual production. On this basis, brushless DC motor has been developed. However, due to the nonlinear and time-varying characteristics of the motor, it is difficult for the conventional PID control to achieve the desired control effect in the control process. The intelligent PID control technology is applied to the control of the DC motor in order to obtain the best process response curve. This paper introduces the working principle of Brushless DC motor and the principle of PID control, and analyzes the fuzzy control, and designs the fuzzy PID controller. Finally, the simulation of fuzzy PID and conventional PID control is carried out, and the simulation results show that the former is better.
Key words: Brushless DC motor; Intelligent control; PID; Fuzzy PID;Simulink
【中图分类号】TM301.2 【文献标识码】B 【文章编号】1561-0330(2018)06-0000-00
1 引言
随着电力电子技术和自动控制技术的发展,无刷直流电机用电子换向装置代替了机械式的换向装置[1],使其兼具了直流电机和交流电机的优点,因而获得广泛应用,主要用于家电、计算机、办公、汽车、数控机床、医疗设备等,但由于无刷直流电机即BLDCM具有高强度的时变性、非线性和耦合等特点,使得常规的PID很难达到控制系统的性能要求,而智能控制对电机数学模型的精确性及鲁棒性没有很高的要求,因此将智能控制与电机控制系统相结合具有诸多的优点[2-3]。
智能控制主要分为三类:模糊控制和人工神经元网络相结合的复合控制、经典PID控制与模糊算法结合所组成的模糊PID控制,以及人工神经元网络与数字滤波相结合的自适应控制。本文主要采用模糊PID控制,来控制无刷直流电机的调速。
2 无刷直流电机
无刷直流电机又称为无换向器电机,采用的是电子换向,也称作是无整流子直流电机。这种电机的结构简单,运行可靠,不产生火花,电磁噪声较低。
无刷直流电机主要由三部分构成:电机本体、位置传感器和电子换相线路。
电机本体包括主定子和主转子两部分,在结构上与永磁同步电动机相似。其中定子为电枢,由多相(三相、四相、五相不等)绕组构成,可接成Y形或Δ形。转子为永久磁铁,按一定极对数组成,可产生气隙磁通。
位置传感器是BCDLM的一个关键结构,一般也由定子、转子组成。定子安装在主电机的壳内,它可检测主转子的位置,并将其转变成电信号来控制电子开关电路,所以也将其称作转子位置检测器。转子的作用是检测出电机本体磁极的位置。
电子换相线路由功率开关管和逻辑控制电路两部分构成,可用来控制电机定子绕组通电的顺序以及导通的时间。其中功率开关单元是核心部分,它将电源的功率按一定逻辑关系分配给了电机定子的各相绕组,使电机产生连续转矩。而控制部分是将位置检测得到的信号,转变成对应的脉冲信号来驱动功率开关管。
3 PID原理
PID控制即比例(P)积分(I)微分(D)控制器。它的基本控制规律为:
4 模糊控制算法
4.1 模糊算法
“模糊”是指在中间过渡时,客观事物彼此间差异的界限不明显,呈现的“亦此亦彼”性。它是相对于“精确”而言的。模糊算法,它通过分析现实对象,来处理数据和构建模糊型数学模型,可用来研究事物本身的模糊性。根据隶属关系把数据元素集合灵活成模糊集合,可确定隶属函数,而进行模糊统计常依据经验和人的心理过程,所以往往通过心理测量来进行[5]。
模糊数学利用数学的工具描述和分析模糊现象,它扩展了经典数学,将“隶属函数”的概念引入到了经典集合理论中,描述了事物对模糊概念的从属程度。
4.2 模糊控制
4.2.1 定义
模糊控制,就是对一些难以用既有的规律来描述的复杂系统,运用自然语言,借助定性的、不精确的和模糊的条件语句来表示。它是一种基于语言的智能控制。
模糊语言集:T(E)={负大(NB),负中(NM),负小(NS),零(ZE),正小(PS),正中(PM),正大(PB)}。
4.2.2 工作原理
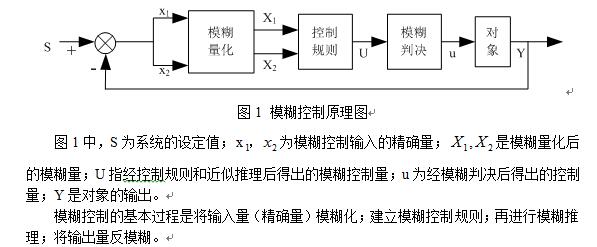
模糊控制原理图如图1。将各传感器测出的精确量转化成适用于模糊运算的模糊量,再将这些模糊量在模糊控制器中运算,最后在将得到的运算结果中的模糊量再转化为精确量,用以操作控制各个执行器,但在模糊控制中,存在着一个问题,就是模糊量与精确量间的相互转化。
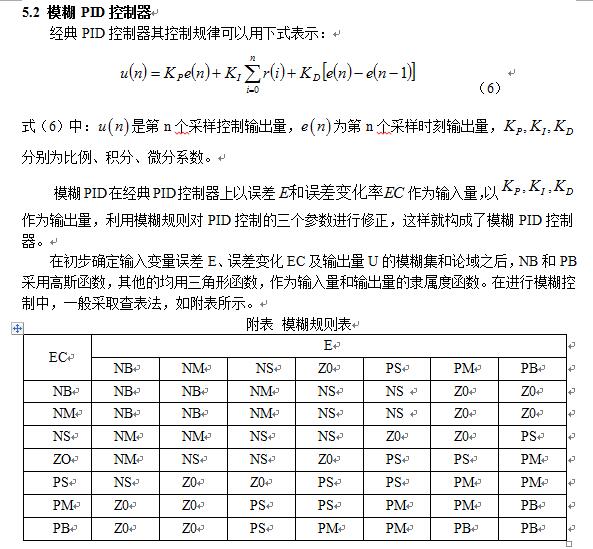
5 模糊PID控制器设计
5.1 无刷直流电机的数学模型
以BLDCM工作环境为两相导通星形三相六状态为例,分析动态模型[6]。假设电机在工作时磁路不饱和,且不计涡流损耗和磁滞损耗,则三相绕组完全对称。于是三相绕组的电压平衡方程[7]可表示为:

6 结语
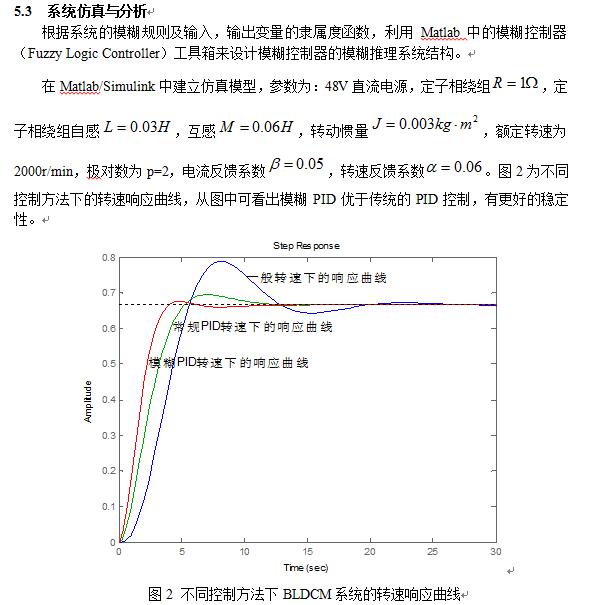
本文研究了在 控制系统中应用模糊适应 进行转速控制的方法,并在 下建立了仿真模型。仿真结果表明在同样的要求下 ,模糊 控制方法比常规PID控制系统响应时间缩短。因此 ,模糊 控制在改善 调速系统性能方面凸显出了更强的性能。
参考文献
[1]刘慧博,王静,吴彦合. 无刷直流电机模糊自适应PID控制研究与仿真[J]. 控制工程,2014,04:583-587.
[2] 张奎,雷勇. 无刷直流电机智能PID控制系统建模与仿真[J]. 测控技术,2015,04:81
-84.
[3]刘明,宋弘. 自适应模糊PID智能控制器在无刷直流电机速度控制系统中的应用[J]. 电机与控制应用,2012,11:22-25.
[4]王雷. 无刷直流电动机调速系统的研究[D].浙江大学,2008.
[5]单薇. 图像处理中模糊算法问题的分析[J]. 计算机光盘软件与应用,2012,02:174.
[6]刘海珊,陈宇晨. 无刷直流电机PID控制系统仿真及实验研究[J]. 系统仿真学报,2009,16:5157-5160.
[7]杨浩东,李榕,刘卫国. 无刷直流电动机的数学模型及其仿真[J]. 微电机(伺服技术),2003,04:8-10.
[8]薛定阳,陈阳泉. 基于 的系统仿真技术与应用[M]. 北京:清华大学出版社,2002.
[9]谭建成. 永恒无刷直流电机技术[M]. 北京:机械工业出版社,2001.
[10]刘刚. 永磁无刷直流电动机控制技术与应用[M]. 北京:机械工业出版社,2009.
[11]刘金琨. 先进 控制及其 仿真[M]. 北京:电子工业出版社,2004.







共0条 [查看全部] 网友评论