



关键词:无传感器控制研究;连续饱和开关函数;变截止频率低通滤波器;卡尔曼滤波器
Abstract: In order to estimate the angle and speed of permanent magnet synchronous motor rotor, a sensorless sliding mode controller for PMSM is designed. In order to solve the problem of high frequency buffeting and low precision of estimating the speed of the traditional sliding mode controller, the continuous saturation function is used instead of the traditional symbol switching function. In the filtering link, the variable cut-off frequency low pass filter and Calman filter are used to realize the automatic adjustment of the low pass frequency of the full speed segment, and the low pass is avoided. The velocity estimation deviation caused by the improper selection of frequency. Finally, Matlab simulation is used to verify the feasibility and engineering significance of the proposed method.
Key words: Research on sensorless control; Saturation switching function; Variable cut-off frequency lowpass filter; Kalman filter
1 引言
目前永磁同步电机运用广泛,由于电机控制系统是闭环控制的,所以永磁同步电机速度和转子位置的精确获得很重要。传统的机械传感器成本高,容易受到温度、湿度和电机振动的影响还会增加电机控制尺寸和体积。对此,学者们提出不同的无传感器算法,比如模型参考自适应算法(Mars)、扩展卡尔滤波器算法、人工智能方法等等[1]。这些方法都适用于无传感器电机控制系统的研究。滑模算法受到大家广泛使用是因为对系统匹配的有界不确定扰动具有强鲁棒性[2-7],但是传统滑模控制的高频抖振问题突出,这会导致估算转速和估算角度和实际的产生偏差。为了解决这个问题,文献[8]以转速误差为滑模面建立滑模控制器代替传统的PI控制器建立双滑模提高鲁棒性;文献[9]针对永磁直线同步电机分别选取速度和直轴电流的滑模量,利用基于二阶滑模的鲁棒速度微分器来估计螺旋算法所需要的加速度信号;文献[10]针对滑模变结构存在的抖振问题提出了用饱和函数的方法,提高转速精确度;文献[11]设计了一种基于Mars的永磁同步电机无速度传感器,提高了精确性;文献[12]提出基于扩展滑模观测器进行永磁同步电机无速度传感器的研究。本文在针对一阶传统滑模控制器出现的抖振问题,在电流环用连续饱和函数代替不连续的开关函数;用变截止频率低通滤波器代替传统的定值低通滤波器,有利于缩短相位延迟,防止因截止频率选取不当导致的转速偏差;最后使用卡尔曼滤波器过滤估算反电势的高频信号得到更加连续平滑的反电势曲线。
2 传统滑模控制原理
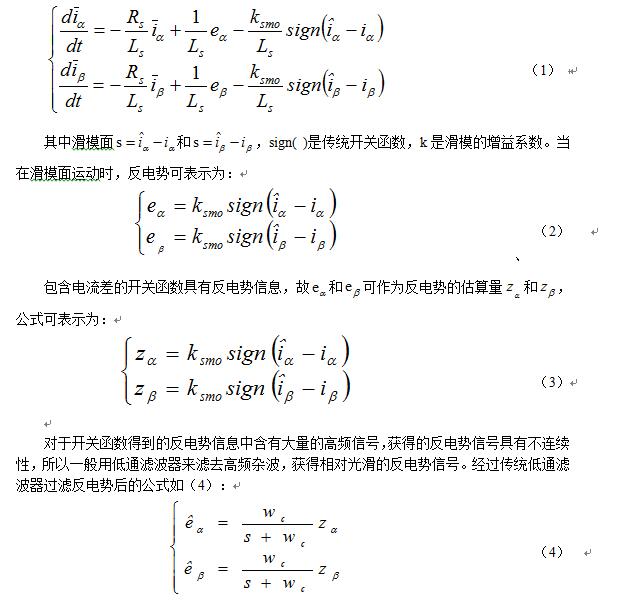
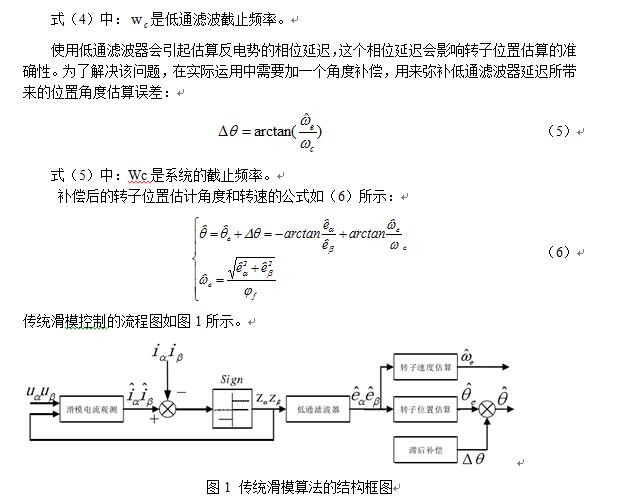
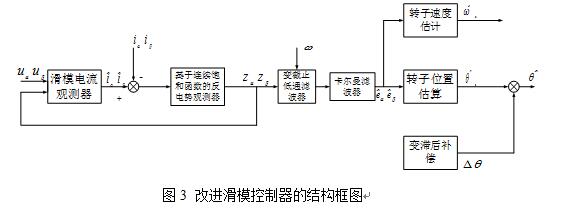
滑模算法是利用永磁同步电机的电流和电压作为输入,通过滑模观测算法得到电机的估算反电势,进而得到转子的速度和位置,经过位置滞后补偿和转速修正之后,将估计值送入矢量控制的速度环和电流环中,利用PI调节器经过SVPWM来对电机实现控制。为了建立滑模控制器,建立电机在α和β轴的数学模型[13-14]:
3 改进的滑模控制器
3.1 基于饱和函数型的抖振削弱
此外传统开关函数在0处不具有连续性,会因为系统的惯性、测量的误差等原因导致在滑模面反复穿梭,形成锯齿状的运动轨迹。为了降低开关函数带来的抖振问题,需要用连续函数代替传统的开关函数。本文用连续饱和函数进行研究,连续饱和函数原理图如图2所示。
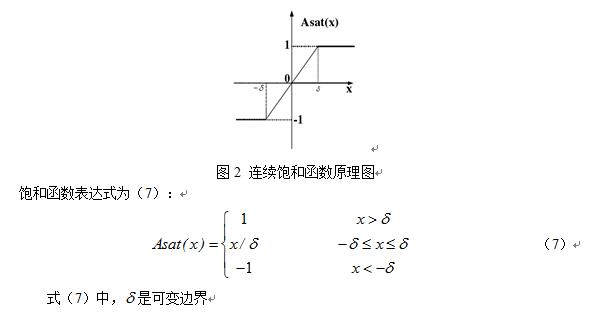
由式(7)可知:连续饱和函数sat是一种非线性函数,利用连续函数可以有效降低正负号产生的高频分量,达到减低抖振的目的。为了保证滑模切换的速度,边界层的厚度是可以自动调节,随着电机转速的自适应变化,大大减小了抖振,提高系统稳定性和观测器的效果。
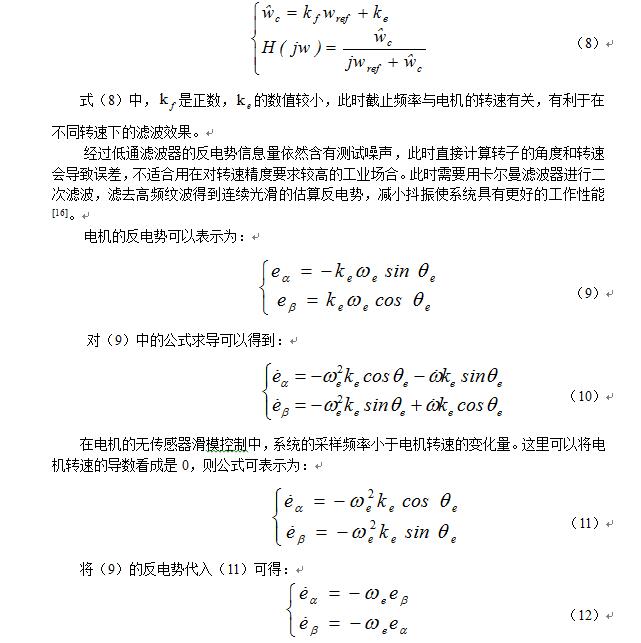
3.2 变截止频率低通滤波器和卡尔曼滤波器组合
由于电机变速的过程中,传统的滑模截止频率是有个定值,对于不同频率下的高频分量不具有自适应性,很难真正对各个速度段做有效的滤波。这里用可变频率截止滤波器来代替传统低通滤波器,可变频率截止滤波器的表达式为[15]:

4 仿真结果及其分析
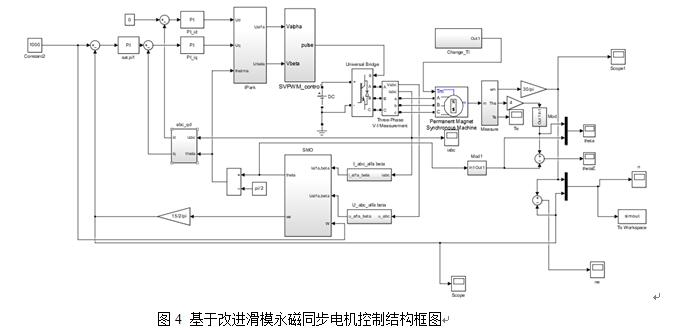
永磁同步电机在实际的运行过程中,既均速的情况又变速的情况,既有空载也有负载的情况,外界突加的扰动会对系统造成不稳定,影响结果的精确度。本实验利用Matlab仿真软件,电机的参数是极对数Pn=4,定子电感Ls=8.5mH,定子电阻R=2.875Ω,磁链φf=0.175Wb,转动惯量J=0.001Kg•m2,阻尼系数B=0,直流侧电压U=311V,开关频率f=10kHz。分别读取电机的转速值、转速差来看滑模控制器的实际性能。本文所写基于改进滑模控制器的永磁同步电机模型,如图4所示。
本次仿真实验主要研究永磁同步电机在变速和变力的实际条件下,估算转速的准确性,实验如下:
(1)研究永磁同步电机在均速状态下的转速估算情况,对比传统滑模控制器和改进型滑模控制器,本实验总时间0.1s,给定转速1000r/min,空载启动。传统滑模控制下的转速和转速差如图5(a)所示,基于改进后的滑模控制下的转速和转速差如图5(b)所示。
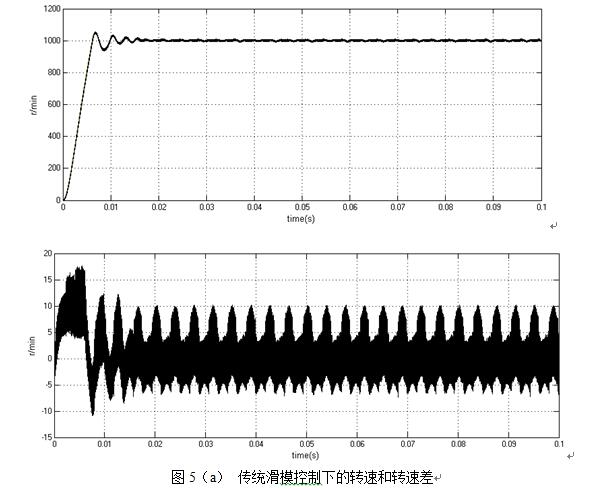
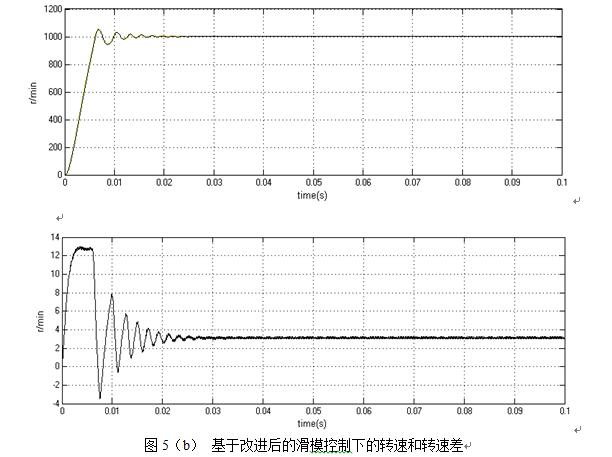
当给定转速是1000r/min时,根据图5(a)可知:传统滑模的最大转速差达到16r/min,超调量是1.6%,进入稳定后转速差在11r/min;如图5(b)所示的改进后的滑模器启动最大转速差仅为13r/min,超调量是百分之1.3%,进入稳定后转速差在3.22r/min,相比传统滑模控制,改进滑模控制的转差得到了很大的提升,对于实际速度的跟踪性更强。
(2)研究永磁同步电机在变速情况下转速的估计情况,设置实验总时间为0.15s,分别在0-0.05s,给定转速是1000r/min;在0.05s-0.1s,给定转速是1500r/min;在0.1s-0.15s,给定转速是1300r/min。
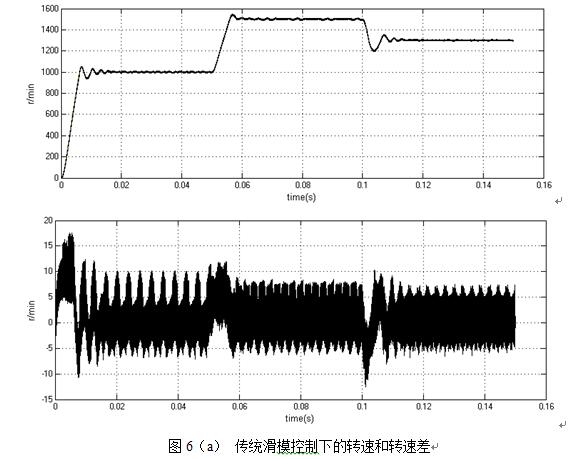
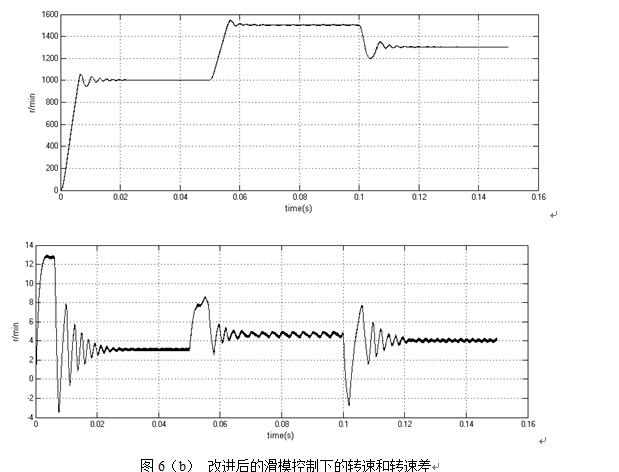
图6(b)在图6(a)的基础上加了变截止低通滤波器并且用变补偿相位法来过滤估算反电势,同时用饱和函数代替符号开关函数。根据图6(a)可知:系统在1000r/min、1500r/min和1300r/min的情况下都可以保持稳定,在1000r/min时,传统滑模控制器稳定运行的转差达到11r/min;在1500r/min和1300r/min时,转差分别是8r/min和7r/min而改进型的滑模控制器转差分别是3.3r/min、5.2r/min和4.2r/min。传统滑模控制器在各速度段超调量分别是1.6%、0.8%和0.53%而改进后的滑模控制器在各速度段的超调量是0.33%、0.34%和0.323%说明在基于改进滑模控制器的启动转速误差小则系统稳定性更好。
(3)研究永磁同步电机在运行时候,外界扰动对系统运行稳定性和滑模观测器输出转速的影响。分别在电机启动阶段,稳定运行阶段加上扰动,本实验总时间为0.1s,电机的参考转速是1000r/m,在0.005s,减载-1N•m;在0.03s加上一个5N•m的负载,研究系统的稳定性和估算转速误差:

本实验在电机启动阶段(0.005s)和正常运行阶段(0.03s)分别施加-1N•m和5N•m的负荷,控制系统在0.03s时,转速出现振荡,说明系统不稳定但是在0.038s时电机再次稳定运行。对比扰动前和扰动后由图7可知,无论是电机转差还是实际转速与理想转速相比,误差有一定幅度的增加,说明扰动对系统有一定程度的影响,由图7(b)的转差图可知,在稳定后,转差一般保持3.3r/min仍然远远小于传统滑模控制器将近11r/min的转差。这两处针对电机启动、稳定运行扰动实验说明了使用连续饱和函数加后置变频率低通滤波器和变相位补偿控制下的滑模系统在稳定性和估算转速有着良好的性能。
5 结论
针对传统滑模控制器存在的抖振问题,本文将传统滑模函数中的符号开关函数用正弦性饱和函数代替进行研究,实际情况表明电机运行更加平稳同时电机的实际转速与估算转速的误差减小,系统的鲁棒性提高。这是因为电机运行时转速发生变化,对应观测器中估算值的高频分量也会发生变化,传统做法是设置一个固定最佳截止频率,但是不能自适应转速变化,滤波效果不好,而相位滞后补偿往往也不准确。本文是将转速和截止频率构建函数关系达到在不同转速下的频率自适应,同时滞后补偿也是基于电机转速实现变滞后补偿,提高了转角估算的准确性。为了验证改进型滑模器的性能,本文与传统滑模控制器做比较并且设计了电机在稳定运行、变速运行和突加扰动运行这三种情况下的转速和转速差情况。通过Matlab仿真结果证明,此无传感器滑模控制器具有良好的准确性和跟踪性。
参考文献
[1]郑泽东,李永东. 永磁同步电机控制系统综述[J]. 伺服控制,2009(01):22+24-26.
[2]In-Cheol B, Kyeong-Hwa K, Myung-Joong Y. Robust Nonlinear Speed Control of PM Synchronous Motor Using Boundary Layer Integral Sliding Mode Control Technique[J]. IEEE Trans on Control Systems Technology,2000,8(1): 47-54.
[3]Fu-Juay C, Shih-Hsiung T, Shyang C. Tracking Control of DC Motors Via an Improved Chattering Alleviation Control[J]. IEEE Trans on Industrial Electronics,1992,39(1): 25-29.
[4]Rafiq M, Rehman S U, Rehman F U, et al. A Second Order Sliding Mode Control Design of a Switched Reluctance Motor Using Super Twisting Algorithm[J]. Simulation Modelling Practice & Theory,2012,25(6): 106-117.
[5]Morfin O A, Loukianov A G,Ruiz R, et al. Torque Controller via Second Order Sliding Modes of WRIG Impelled by DC-Motor for Application in Wind Systems[C]. Proceedings of the American Control Conference,2012: 985-990.
[6]张晓光,赵克,孙力,安群涛. 永磁同步电动机滑模变结构调速系统新型趋近率控制[J]. 中国电机工程学报,2011,31(24):77-82.
[7]Ahmed F S, Laghrouche S,El Bagdouri M.Second-Order Sliding Mode Based Output-Feedback Control of an Engine Air Path Actuator in Presence of Uncertainties[C]. 2010 Conference on Control and Fault-Tolerant Systems,2010: 50-56.
[8]张细政,王耀南,杨民生. 永磁同步电机无位置传感器双滑模鲁棒控制[J]. 电机与控制学报,2008(06):696-700.
[9]孙宜标,杨雪,夏加宽. 采用鲁棒微分器的永磁直线同步电机二阶滑模控制[J]. 中国电机工程学报,2007(33):6-10.
[10]孙杰,崔巍,范洪伟,章跃进. 基于滑模观测器的永磁同步电机无传感器矢量控制[J]. 电机与控制应用,2011,38(01):38-42.
[11]齐放,邓智泉,仇志坚,王晓琳. 基于MRAS的永磁同步电机无速度传感器[J]. 电工技术学报,2007(04):53-58.
[12]孟贺,文新宇. 永磁同步电机扩展滑模观测器设计[J]. 太原科技大学学报,2018,39(03):171-177.
[13]王洪武,陈业明,陈磊,张东宁. 同步磁阻电机矢量控制研究[J]. 微特电机,2015,43(04):74-76.
[14]王悍枭,刘凌,吴华伟. 改进型滑模观测器的永磁同步电机无传感器控制策略[J]. 西安交通大学学报,2016,50(06):104-109.
[15]鲁文其,黄文新,胡育文. 永磁同步电动机新型滑模观测器无传感器控制[J]. 控制理论与应用,2009,26(04):429-432.
[16]张海刚,张磊,王步来,叶银忠,万衡,徐兵. 一种卡尔曼滤波器的永磁同步电机无速度传感器[J]. 电机与控制应用,2017,44(07):20-25.
作者简介
陈俊杰 (1993 -) 男 硕士生 研究方向为电机与智能电器






共0条 [查看全部] 网友评论