


关键词:内燃调车机车;永磁同步电机;制动斩波器;PID控制算法
Abstract: This paper introduces the diesel shunting locomotive circuit based on permanent magnet synchronous motor, through the MATLAB modeling and Simulation of electric braking power for braking energy requirements of the transfer effect on the DC link voltage, and the effect of PID regulator is tested by simulation, the results show that the PID control algorithm is accurate and fast to adjust the DC bus voltage under braking conditions.
Keywords: Diesel shunting locomotive; Permanent magnet synchronous motor; Brake chopper; PID control algorithm
【中图分类号】TM341 【文献标识码】B 【文章编号】1561-0330(2018)08-0000-00
1 引言
永磁同步发电机以永久磁铁励磁,与常规电励磁同步机相比电枢反应弱,避免了产生转子磁场的励磁功率和滑环间的磨损,故其发电效率大大提高。而该内燃调车机车上使用的是永磁同步电动机,其结构简单,易于控制,在内燃调车机车上使用是未来发展的一大趋势。而且机车的各运行工况伴随着能量的传递,如何处理这些能量是交流传动内燃机车关键技术之一。以前论文多以研究电气牵引为主,很少对制动详细论述,所以本文通过建模仿真了电阻制动工况下PID控制算法的调节效果。
2 交流传动电路
该内燃调车机车采用的是交流电传动系统,其本质是柴油机带动永磁同步发电机,经三相不可控整流器将三相交流电整流成为直流电,直流电压经中间环节的支撑电容滤波和稳压,然后经三相逆变器将直流电逆变成带动永磁同步电动机运行的三相交流电。该逆变器接四个永磁同步电动机(并联),机车制动时,永磁同步电动机工作在发电机状态,将动能转化成电能经逆变器流向中间环节[1]。交流传动机车电路如图1所示。

3 制动工况仿真
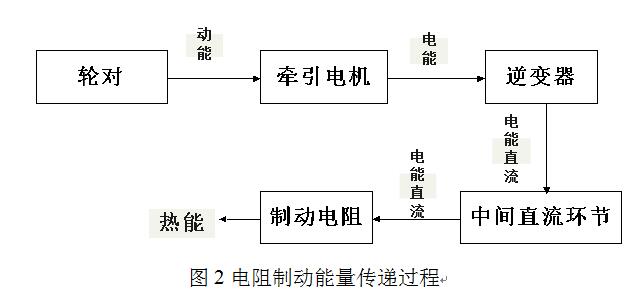
内燃调车机车根据制动功率、制动力绘制电阻制动特性曲线,机车按照电阻制动特性运行。电阻制动属于正常工况,该工况下要保持电动机发出的功率与制动电阻上消耗的功率平衡。当内燃调车机车工作在电阻制动工况的时候,永磁同步电动机就由电动状态转为发电状态进行工作,给中间直流环节进行供电,会导致中间直流环节电压过高,制动能量由制动斩波器来控制通过制动电阻消耗,以调节中间直流母线电压[2]。电阻制动能量传递过程如图2所示。
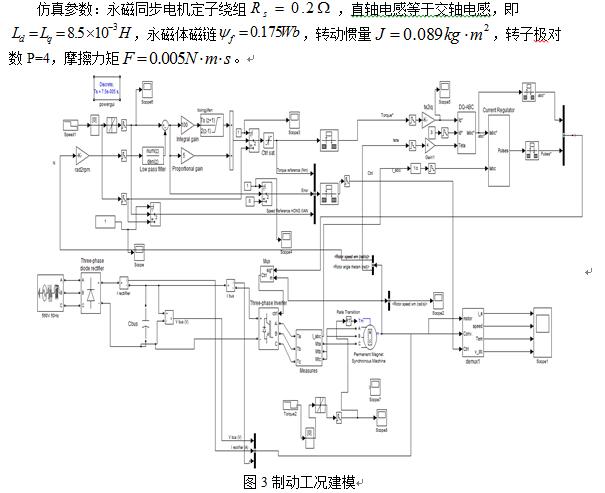
制动工况建模如图3所示。本文通过MATLAB建模,仿真分析了基于永磁同步电机的内燃调车机车在电阻制动工况下,未加制动斩波器时制动能量对中间直流环节电压的直观影响。根据机车的运动规律,带入相关参数,列写函数方程,建立基于永磁同步电动机矢量控制下的电阻制动工况模型,该调车机车有四个永磁同步电动机,其中一台由速度控制,另外三台由力矩控制。本系统模拟一台电机按照速度控制进行建模,根据机车不同速度时对应的不同力矩进行调节。
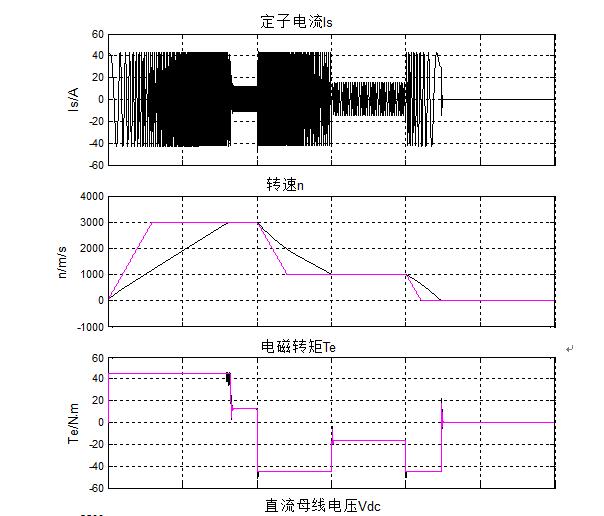
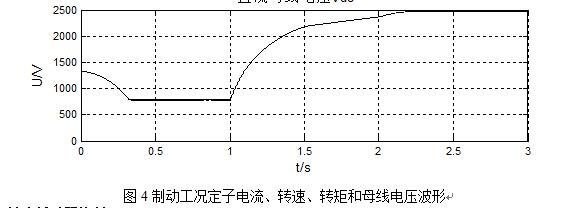
制动工况定子电流、转速、转矩和母线电压波形如图4所示。从图4中可以看出,系统在加减速过程均以最大、最小转矩 电磁转矩(黑色实际值,红色参考值)运行,1秒之前,机车在牵引状态下运行,中间直流环节电压正好是三相交流电经整流后的电压,电机达到设定转速时,输出的电磁转矩与负载转矩相平衡。1秒之后,制动运行,中间环节直流电压泵升,甚至达到,2500V说明电机处于发电状态,将制动能量回馈到中间环节,这些能量得不到处理会导致线路或者器件的损坏,对机车运行危害极大。
4 制动斩波器控制
4.1 制动斩波器模型
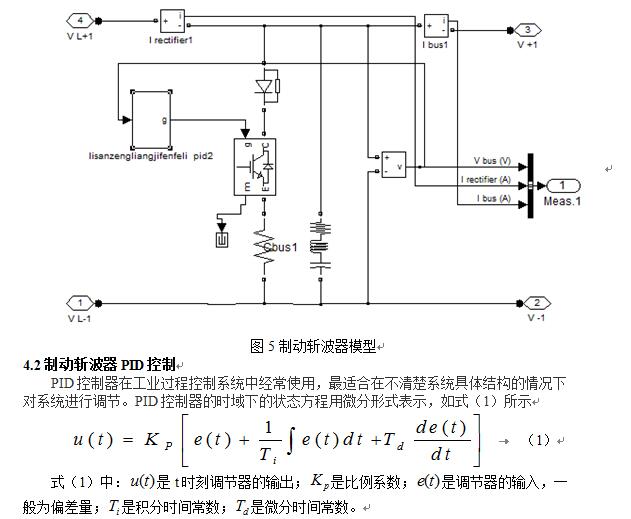
如图5所示制动斩波器由一个并联二极管的IGBT与一个制动电阻串联后并联在中间环节的支撑电容两端,当电动机运行在制动工况时,电机发出的能量流向逆变器,回馈到直流侧,因整流侧是不可控二极管,所以能量回不到电网,只能通过开通IGBT斩波模块,将能量泄放在制动电阻上,以热能的形式消耗。
4.3 PID算法实现
本文根据控制算法和逻辑判断,结合实际情况,编写PID算法流程图如图6所示,工程验证时可据其编写程序。
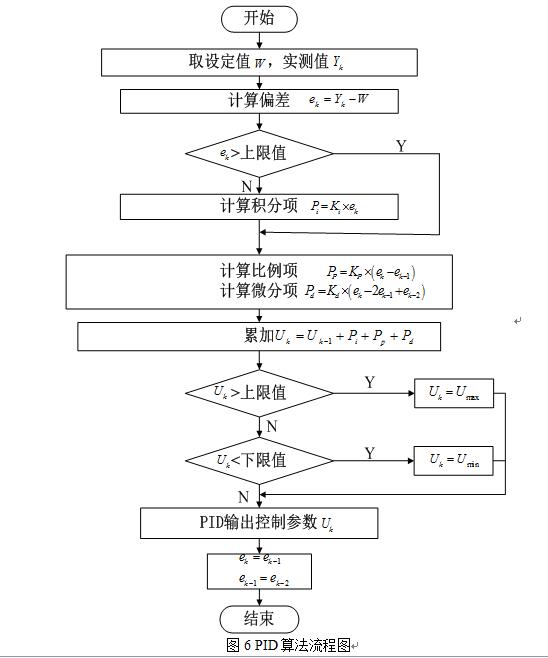
PID运算过程均以浮点数进行计算,在控制过程中不断改变控制参数。系统运行时,设置定时器每隔T秒中断一次,进行PID运算,不断调节输出参数值改变占空比,调整PWM输出波形,实现对IGBT的实时控制。

4.4 PID参数整定
为使中间环节直流母线电压调节达到控制,必然要整定PID控制器的参数值,使其合适,达到预期效果。本文根据以下过程进行整定:
(1)整定PID参数时,按照比例、积分、微分的顺序进行。
(2)整定比例参数。该系统将比例参数由30变为120的过程中发现,系统响应变快,但是超调变大,引起起始阶段的微小波动,所以经过仿真对比选取了比例系数为60,既能保证响应速度,超调又小。
(3)采样时间T的确定,根据中间环节支撑电容构成的环节,如图7所示,计算其传递函数G(s)
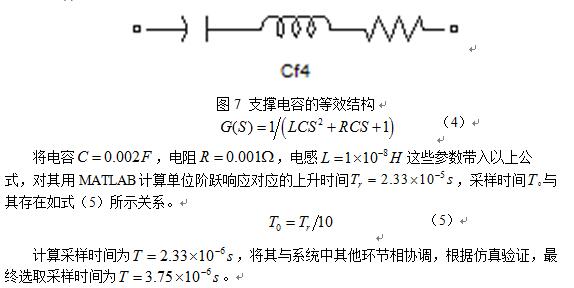
(4)积分环节在系统中对静差起调节作用,在调节过程中是按照由大变小的规律进行设定,观察效果,然后将其缩小,结合比例系数最终选取积分系数为10。得到满意的控制过程和整定参数。
(5)微分环节能预测偏差很快响应其变化,可以减小超调,保持系统的动态响应效果。微分时间常数的调节也是按照由小到大的规律调节,逐步试凑,选择为3,得到满意的调节效果。
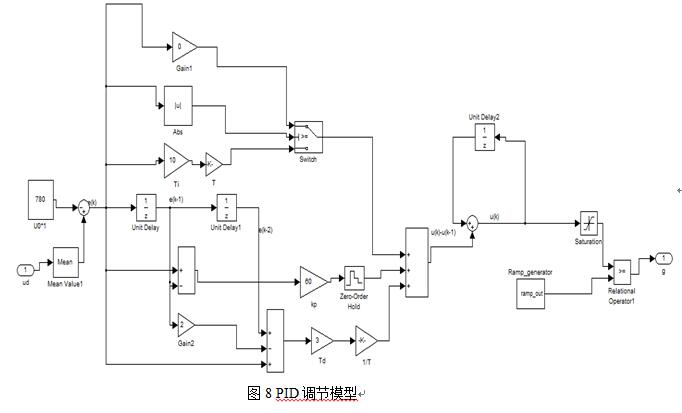
综上所述,通过仿真,选取合适的PID调节参数,可以使系统在运行过程中保持中间直流环节母线电压稳定在780V左右,该算法有比较好的调节效果。PID调节模型如图8所示。
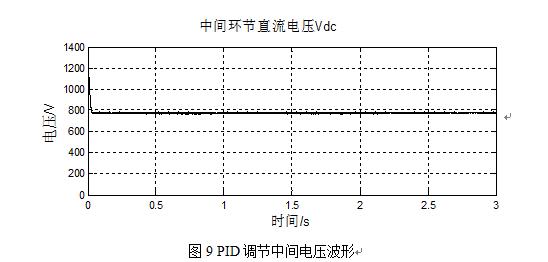
PID调节中间电压波形如图9所示,1秒后中间电压降到780V,PID调节起到作用,显然达到了控制直流母线电压,防止泵升的效果。
5 结论
机车电阻制动时,制动能量回馈到中间直流环节,抗积分饱和增量式PID算法调节制动斩波器能使中间直流母线电压接近设定值,响应快速,鲁棒性强。但从效果图中看出电压是有微小波动的,而前馈控制可以对系统干扰做出预测,所以下一步可以采用前馈+PID算法对系统做出改进,以减小干扰引起的波动。
参考文献
[1]杨敏.青藏线NJ2型机车电力传动系统的特点[J].铁道机车车辆人,2008,(5).
[2]张东方,肖功彬,周少云.SDA1型交流传动内燃机车微机控制系统设计[J].机车电传动,2013,( 4) .
[3]孙传友,孙晓斌.测控系统原理与设计[M].北京:北京航空航天大学出版社,2002.




共0条 [查看全部] 网友评论