



Abstract: In order to make the actual adhesion coefficient as close as possible to the prevailing viscosity coefficient at the time, in order to obtain greater average traction, improve the adhesion utilization. On the basis of introducing the mechanism of wheel and rail adhesion, the paper summarizes the idling criterion of the high speed train based on the optimal adhesion and the corresponding adhesion control method. The theoretical basis and advantages and disadvantages of each method are introduced in detail. Finally, the development of adhesive control in China is forecasted.
Key words: High-speed train; Adhesion coefficient; Idling criterion; Optimal adhesion control
【中图分类号】U292.91+4 【文献标识码】B 【文章编号】1561-0330(2018)08-0000-00
1 引言
目前,高速列车的牵引/制动性能的发挥仍然主要依赖于轮轨黏着作用,然而轮轨间的黏着状态复杂多变,受到运行状况、气候条件和车辆结构等诸多因素影响[1],车轮空转/滑行时有发生,仅依赖司机的主观判断采取相应措施很难实现空转/滑行的有效抑制。为此,现在高速列车通常都装有防空转/滑行控制系统,也称黏着控制系统。根据黏着控制方式的不同,铁道车辆黏着控制方法可分为传统校正型控制和现代优化黏着控制两大类。校正法这种控制方式由于一方面需大幅削减电机转矩以消除己发生的空转/滑行,另一方面还需要缓慢地增加电机转矩以防止二次空转/滑行,黏着工作点往往远离黏着峰值点,虽然可以消除空转/滑行现象,但是其黏着利用率一般较低[2]。与传统校正型黏着控制方法不同,现代优化黏着控制方法的显著特点是通过对黏着峰值点的自动搜寻,并使轮轨黏着工作点始终稳定运行在黏着峰值点附近,从而获得黏着的高效利用[3]。黏着利用率的提高不仅可以有效地提高列车车辆的牵引性能,缩短制动距离,改善乘客乘车舒适性,而且还能显著地减小车辆的空转/滑行,避免轮轨严重擦伤,从而延长轮轨的使用寿命[2]。
2 轮轨黏着机理
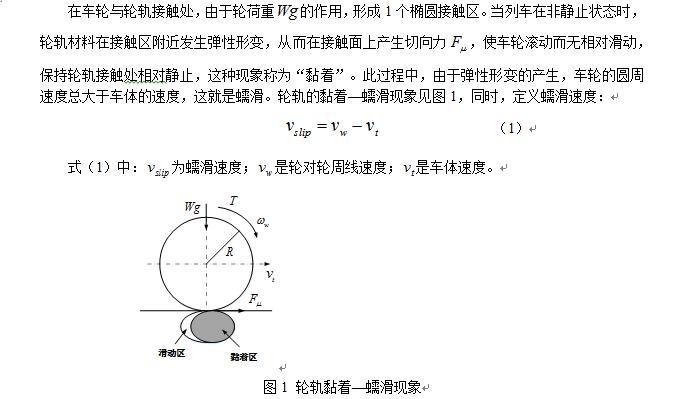
2.1 黏着与蠕滑
2.2 黏着系数及利用率
定义黏着系数如下:
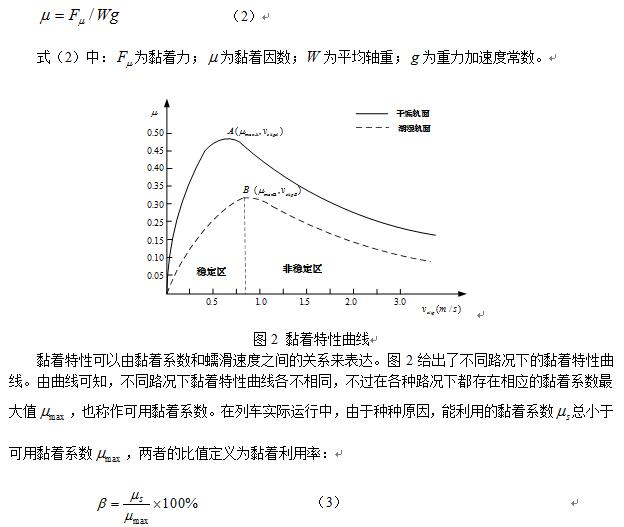
显然,最优黏着控制的目的就是控制列车在稳定区内有效地利用最大黏着力,使 尽量接近100%。不过,当牵引力或制动力大于最大黏着力时,列车将进入非稳定区,这时就会发生空转,影响列车的行车安全。如果进入非稳定区,要及时改变机车的牵引力或制动力,使机车的黏着力运行在黏着特性曲线的稳定区域,从而获得最大的平均牵引力。最优黏着控制方法正是以这样的目的而开展的,而要知道何时进行控制,进行什么程度的控制,都需要先判断机车的空转趋势。
3 最优黏着控制的空转识别
3.1 基于加速度微分的空转识别
由文献[5]可知列车牵引电机转动方程为:
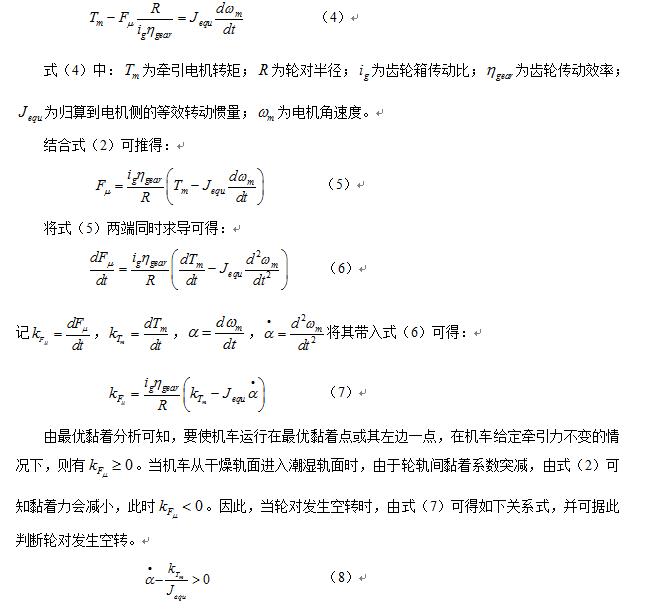
3.2 基于黏着特性曲线斜率的空转识别
通过观察黏着特性曲线可知,在稳定区时,曲线斜率为正,在黏着峰值点处曲线斜率为零,当进入非稳定区(空转区)后,曲线斜率为负。因此可以通过实时计算当前黏着特性曲线的斜率来进行空转判断,曲线斜率可表示如下:

4 最优黏着控制方法
4.1 基于加速度微分的最优黏着控制
在建立了基于加速度微分空转识别判据的基础上,可根据机车空转程度建立相应的黏着控制措施,其控制方法的简单流程图如图3所示。

基于加速度微分判据的黏着控制方法不仅能够控制较为严重的空转,而且能够识别出轻微的空转趋势,并通过实时调整电机的输出转矩来抑制空转的持续发生。这样凭借空转的严重程度来作出相应的反馈,既能有效的控制空转,而且提高了机车的平均牵引力和黏着利用率。
但是加速度微分存在一个缺陷,它不能检测出速度超过200km/h以上时机车发生的空转,因为在高速范围内,速度信号受噪声的干扰很大,这时很难区分信号和噪声了[8]。
4.2 基于黏着特性曲线斜率的最优黏着控制
建立这个系统,必须实时的获取当前轨面的黏着系数,然而在现有的技术条件下,无法实现。因此可以建立黏着系数估计模型,通过配置合适的极点,便能由状态观测器准确的估算出当前轨面的黏着系数。
由文献[6]可知,考虑转动黏滞系数的牵引电机转动方程为:

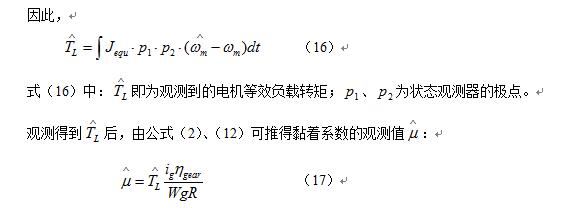
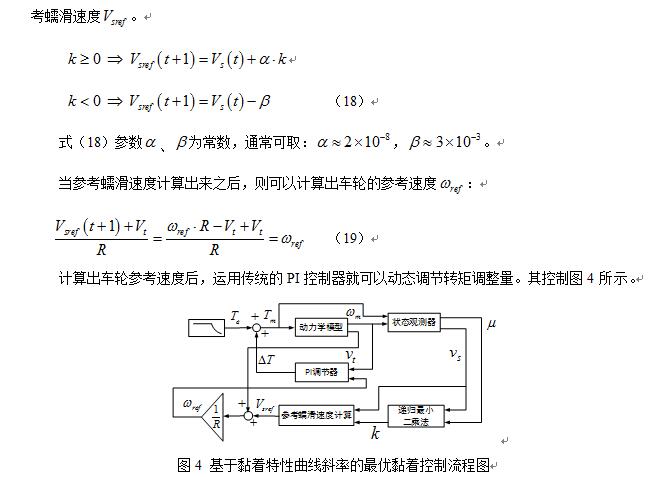
获取黏着系数和蠕滑速度后,当前轨面的黏着特性曲线也就建立起来了。然后利用3.2中介绍的带遗忘因子k的递归最小二乘法对该黏着特性曲线进行检测。根据曲线特性,当斜率 时,说明机车还没有运行在最大黏着力附近,此时需要增大牵引电机转矩;当斜率 时,说明机车运行在曲线的非稳定区,已具有空转趋势,此时应减小电机转矩。根据这一思想,采用如下方法计算参考蠕滑速度 。
5 展望
随着现代控制理论研究的深入和应用范围的推广,一些智能控制也被引入到黏着控制研究中来。目前,常见的主要有两种智能黏着控制算法,基于模糊理论的黏着控制和基于滑模变结构的黏着控制。
模糊控制,其最大特点是无需详细知道被控制系统的精确数学模型,具有很强的鲁棒性。考虑到轮轨间黏着受到诸多耦合因素影响且作用机理复杂,车辆牵引传动系统具有很强的非线性,基于精确数学模型的传统黏着控制难以很好地应用到车辆黏着控制当中。目前,在运用模糊控制理论到车辆黏着控制方面,大体可分为基于空转趋势识别的模糊黏着控制[11]、最优蠕滑速度模糊推定的黏着控制[12]以及基于最优蠕滑速度的模糊PID控制[13]三种策略。另外,针对模糊规则对现场数据的依赖问题,学者Adrain首次提出在建立模糊黏着控制系统中结合专家知识理论建立模糊规则,减小了对数据的依赖性,并成功应用到列车防滑控制中[14]。
滑模变结构控制,是以经典数学控制理论为基础的一种现代控制策略,其主要按照系统状态偏离滑模面的程度来改变控制器结构,使系统按照滑模面设定的规律运行。滑模变结构控制属于一类特殊的非线性控制系统,系统一般由受控对象和一个变结构控制器组成,控制器含有一个逻辑环节,它操纵控制器结构的变化,进入切换线后,就与系统的结构及扰动无关,因而具有强鲁棒性,是一类非常有效的控制方法。目前,国外学者Yamazaki等人基于滑模变结构控制原理设计了一种非线性高鲁棒性铁道车辆防滑控制器[15],在国内,学者陈哲明则将滑模变结构控制算法应用到高速列车再生制动防滑控制中[16]。然而上述研究仅限于仿真,由于滑模控制理论自身尚待完善,基于滑模变结构控制的黏着控制研究仍需进一步深入。
轮轨间的高效黏着利用是黏着控制系统所追求的目标。然而,由于轨面状况复杂多变,黏着特性呈现较大的不确定性,要使所设计的黏着控制器具有良好的性能是十分困难的。目前,各种黏着控制策略层出不穷,每种方法都有各自的优势和不足,因而如何综合现有的方法,扬长避短,进一步增强黏着控制系统的综合性能是当前黏着控制研究的一个重要课题;同时,智能型黏着控制系统的研发,特别是结合模糊控制、神经网络等现代智能控制理论的高性能黏着控制器也是深入研究的重心。
参考文献
[1]金学松.刘启跃.轮轨摩擦学[M].北京:中国铁道出版社,2012.
[2]董锡明.高速动车组工作原理与结构特点[M].北京:中国铁道出版社,2007.
[3]邱存勇,廖双晴.电力机车黏着控制现状与展望[J].信息与电子工程, 2008,6(4):301-306.
[4]李江红,马健,彭辉水.机车黏着控制的基本原理和方法[J].机车电传动,2004,8(6):4-8.
[5]黄云鹏,赵坤,陆峰.轨道车辆牵引电机负载模拟系统建模及仿真[J].仿真技术,2010,05(1):161-163.
[6]林文立,刘志刚,方攸同.地铁列车牵引传动再黏着优化控制策略[J].西南交通大学学报,2010,47(3):465-470.
[7]Sado H,Sakai S,Hori Y. Road Condition Estimation for Tracyion Control in Electric Vehicle[C]. ISIE,1999,2:973-978.
[8]李云峰.基于最优蠕滑率的黏着控制方法研究[D].成都:西南交通大学,2011.04.
[9]刘豹,唐万生.现代控制理论(第三版)[M].北京:机械工业出版社,2006:188-227.
[10]林文立,刘志刚,孙大南. 基于最优粘着利用的地铁牵引电机并联控制策略[J].电工技术学报,2010,25(6):24-30.
[11]王辉,肖建.小波分析在机车优化黏着控制中的应用[J].铁道学报,2005,25(5):32-38.
[12]Sun-Ku Kwon,Uk-Youl Huh,Kak-II Kim,Jin-Hwan Kim. Re-adhesion Control with Estimated Adhesion Force Coefficient for Wheeled Robot using Fuzzy Logic[C]. IEEE International Electronics Society,2004,3:2530-2535.
[13]陈哲明,曾京,罗仁.列车牵引黏着控制及其仿真[J].现代制造工程,2009(6):8-12.
[14]Adrian D, Shogo Y. Combined Heuristic Knowledge and Limited Measurement Based Fuzzy Logic Antiskid Control for Railway Applications[J]. IEEE Transactions on systems,Man,and Cybernetics, 2006,4:557-568.
[15]Hiro-o Yamazaki等.基于非线性鲁棒控制原理的防滑控制[J].变流技术与电力牵引,2007(3):40-44.
[16]陈哲明,曾京,罗仁,关庆华. 高速列车电空联合制动控制研究[J].电气传动,2010(5):3-7.
作者简介
徐诗孟 (1991 - ) 男 硕士在读 研究方向为电机及驱动控制






共0条 [查看全部] 网友评论