



Abstract: In view of the current application of robots, We will explain how to select robots for transportation projects, Mainly through load calculation, on-site project communication, And installation location design.
Keywords: Robot selection Handling project Load calculation
【中图分类号】TP242 【文献标识码】B 文章编号1606-5123(2018)07-0000-00
1引言
机器人搬运项目涉及到的项目类型很多,例如冲压、点焊、机床上下料等只要是机器人需要悬挂负载,在规定的节拍内完成动作的都可以称作搬运项目。但是在项目的实施过程中往往会遇到以下问题:
(1)机器人负载不够;
(2)机器人动作节怕不够;
(3)机器人需要更换为新的型号。
由于这些项目均是非标项目,机器人型号的等参数均是在合同中注明的,如果更换型号会给客户和自己都会造成很大损失。本文从机器人选型的方面考虑,介绍机器人选型需注意的事情。本文根据安川机器人的参数进行介绍。
2 安川MH50-II机器人
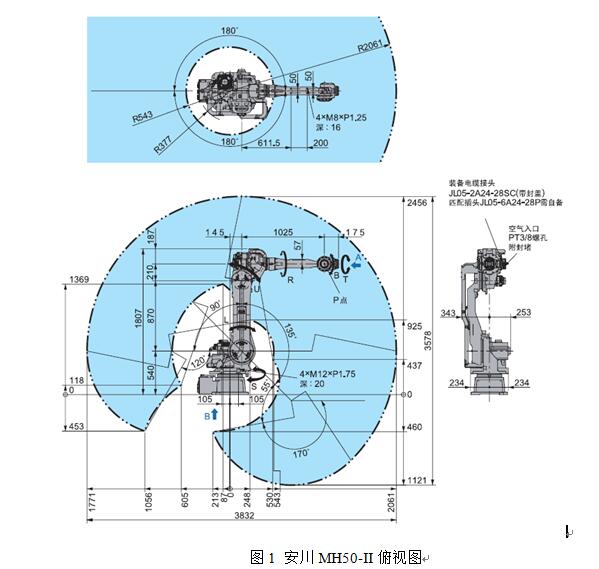
首选要确定机器人的工作范围是否可以满足要求。初步根据图1中俯视图,机器人的工作半径为2061mm,侧视图要注意所工作的空间能够置于有效的工作范围内(蓝色区域)。
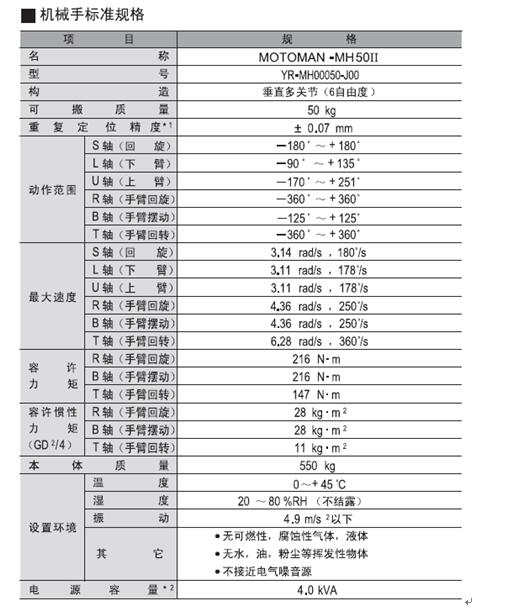
安川MH50-II参数说明如表1所示。表1为机器人参数的主要参数,当确定机器人的工作范围满足要求后,就要确定相关参数的问题。
表1 安川MH50-II参数说明
3 负载能力计算
3.1 负载能力规划
首先确定负载是否满足,规格书中“可搬质量”=50㎏,是指悬挂在机器人上的总体负载50公斤。对于设计者来说可搬质量=搬运产品质量+抓手质量+管线质量等所有安装在机器人上的负载质量。负载能力规划与计算如图2所示。

3.2 力矩和转动惯量的计算
当可搬质量初步满足机器人参数后,最重要的是要计算T轴的允许力矩和允许转动惯量。首先必须确定重心、力臂的大小,如图3:力矩和转动惯量均小于等于机器人允许参数,即认为合格。
关于力矩和转动惯量的计算,可以查询机械设计手册进行相关计算。
实际项目的选型中,建议负载进行适当的优化,一般选择优化状态为80%-90%之间。如果超出选择机器人时应当考虑负载升一档的机器人。一般机器人负载能力提升一档,价格也会提升。如果考虑到价格问题,那么要考虑优化机械设减重,这样才可以使机器人全寿命的工作。
4 工作节拍计算
节拍的计算必须根据现场的机器人动作进行计算,分析主要的运动轴。比如是S轴运动为主,查询相关机器人参数S轴的最大速度为180°/s,常规项目计算按照50%的速度进行。则用90°/s进行计算。一般需要说明的是,机器人节拍的计算必须完全了解现场情况,规划机器人的动作路径才能得出更加可靠的参数,同时机器人从一个轨迹转态更换为另一个轨迹时,必须进行适当的停顿,只有机器人状态稳定后再动作,避免引起安全事故。一般来说,称机器人轨迹转换的时间为跳转时间,一般每个轨迹的跳转按照0.5s计算。需要注意的是,在大型负载的计算时(负载重量在300公斤以上),安全系数要更高(机器人速度要更慢)。最好也可以借助各机器人公司的机器人仿真软件进行仿真,得出理论的节拍数据,要注意的是,软件的节拍仿真与实际是有区别的,实际的节拍也会受很多外界因素的影响,比如信号的传递,一般按照信号传递的最少时间是0.4s。
5 线缆长度选择
线缆主要是指控制柜电源电缆,如图3所示。机器人示教盒电缆的选择。不同的项目,要考虑控制柜的安装位置,操作者示教的位置。这样最重要的问题就是线缆长度是否足够。实际购买的过程中,要务必和机器人公司确定机器人的相关线缆长度标准(并不是一米一米的增加),经过以上的计算,机器人的选型基本完成,同时建议设计者们在实际的项目过程中,多听取客户的意见,尤其是已经使用过及机器人的客户,同时在设计阶段多进行相关的计算核对,避免后期修改带来的风险,

6 结束语
近几年随着“中国制造2025”的实施、机器人换人的自动化需求越来越大。很多项目由于实施周期短、价格竞争激烈等原因,很多项目在机器人的选型上会有一定的错误,导致后期整改带来了各种人力、财力、时间的损耗。本文根据实际项目给出搬运机器人的完整选型设计流程,有效解决搬运工位机器人装备选型工作。
参考文献
[1]安川电机(中国)有限公司.MOTOMAN系列综合样本,资料编号:R-200-00003-17004.
[2]化学工业出版社.机械设计手册(最新第五版).






共0条 [查看全部] 网友评论