



Abstract: Aiming at the situation of hard parking at present,through investigation,this paper choosing the Aisle-Stack stereoscopic garage as the subject investigated,designs an analog system of the stereoscopic garage,which adopts the development board based on STM32F407ZGT6 as system control center.The PC is served as the user operation interface,with three gear motors representing the spatial move of stacker crane by its forward and reverse rotation.When the travel switch is being triggered by the stacker crane,it will emits feedback signal to move the stacker crane to the appointed location,indicating the central control unit working under the pilot lamp of vehicle and status,which is composed by LED.This analog system simulates the operation of the stereoscopic garage via the combination of the PC,the development board and the low-voltage devices,with the advantages of security, intuitive, clear logic and convenience to debug and so on.
Key words: STM32 Stereoscopic Garage Aisle-Stack Analog system
【中图分类号】TN955+.1 【文献标识码】B 文章编号1606-5123(2018)07-0000-00
1 引言
随着社会经济的快速发展,私人汽车拥有量大幅上升的同时,汽车存放问题越来越突出,停车场结构向空间发展是解决当下停车难问题的有效手段。20世纪以来,我国引入并发展立体停车系统技术,1984年,由北京有色冶金设计研究总院率先研制完成两层升降横移式机械停车库。1989年我国又研制成功了竖直循环式机械停车库,且于1991年在中国石化总公司北京设计院正式投入使用[1]。在一些城市已经出现不同程度的立体停车库的身影,但我国立体停车库技术发展不足,致使应用范围小、成本高、实际应用困难等多种问题衍生。
现有立体停车库按运行机制分为升降横移式、垂直循环式、巷道堆垛式、垂直升降式、简易升降式等。其中巷道堆垛式立体停车库是用巷道堆垛机或特种起重机将车辆水平垂直移动到预定泊车位置或相反取出车辆的机械式停车设备,适用于大规模社会公用停车楼及地下停车库。本文设计的立体停车库模拟系统是针对半自动巷道堆垛式立体停车库而构建的,在模拟系统中,以STM32F4系列芯片为系统控制中心,控制状态指示模块、电机驱动模块、开关控制模块完成车辆存取过程,并以上位机通信方式进行模拟系统的运行分析,搭建一个小型的巷道堆垛式立体停车库模型,在此模型上实现对立体停车库系统的研究与学习。
2 巷道堆垛式立体车库系统规划
2.1 堆垛机结构规划
目前国内堆垛机的最大起重量可达4.2吨,起升高度可达35米[2],足以满足巷道堆垛式立体车库需求。堆垛机具有以下特点[3]:
(1)堆垛机的整体结构高而窄,适合于在巷道内运行。
(2)堆垛机有高效的存取装置。如货叉、机械手等。
(3)采用PLC控制,堆垛机安全可靠。
(4)堆垛机具有安全保护措施。由于工作场地窄小,设备和电路较多,失常易出现工作事故,所以堆垛机上安装机械和电气保护措施。
堆垛机式立体停车库工程现场如图1所示。

2.2 研究所需器材规划
STM32F407ZGT6的最小系统开发板,电脑,三个减速电机,变压器,触发行程开关,LED灯,各种电阻及连接线等电子元件。
3 软件系统设计
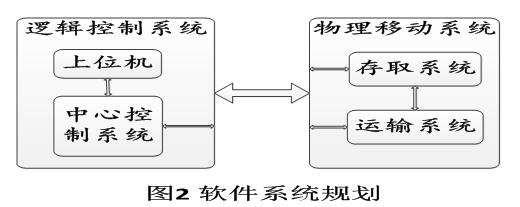
如图2所示,软件系统规划整体分为逻辑控制系统及物理移动系统两大模块,如图2所示。其中逻辑控制系统包含上位机与中心控制系统的通信,以及中心控制系统对物理移动系统发出控制信号。物理移动系统又分为存取系统及运输系统,两者间通过信号传递互相作用,又都分别接受来自中心控制系统的控制信号并根据其动作。
3.1 逻辑控制系统
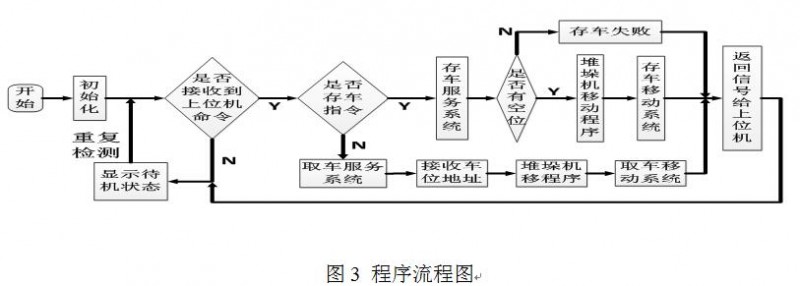
上位机通过USB转串口与中心控制系统双向通信,做出回应,当中心控制系统接收到来自上位机的命令后,根据停车库的当前状态做出回应。若有空闲的停车位,则向物理移动系统发出相对应的指令;若停车库已满,则回应给上位机存车失败的信号。本文通过编程使中心控制系统发出PWM波形,通过改变占波比等参数来控制波形的频率,从而控制电机运转时间、位移量等。程序流程图如图3所示:
3.2 物理移动系统
存取系统主要完成堆垛机从车位取车,以及将堆垛机上的车放至车位的动作。运输系统则是主要完成实现堆垛机移动至正确位置的系统。下面以存车为例,做一过程描述:
系统初始化完成后堆垛机停于初始位置。上位机接收存车命令后与中心控制系统通信,中心控制系统向物理移动系统发出控制信号,存取系统接收到信号后,控制堆垛机上的载车板将车辆从临时车位放至堆垛机上。运输系统接收到信号后,控制堆垛机运转至正确位置,再由存取系统控制堆垛板移动将车放至车位里。存取系统与运输系统每完成一个动作后,向中心控制系统发出反馈信号,当存车动作完成后,堆垛机复位,中心控制系统向上位机反馈存车成功。取车时基本原理与存车相同。
4 硬件系统设计
硬件系统规划即是对实现各软件系统规划功能的部件规划,整体分为程序控制机制及移动操作机制两大模块,如图4所示。
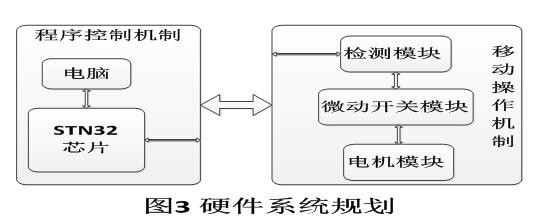
程序控制机制包含电脑及STM32芯片,作为总控制信号的发出者及编程调试环境。移动操作机制包括检测控制信号的监测模块,指示堆垛机位移量及升降量的微动开关模块,以及驱动堆垛机移动的电机模块。
4.1 程序控制机制
为充分利用STM32F103ZET6 微控制器,本文使其部分I/O通过USB2.0与电脑进行数据传输,接收存取车信号;部分通过杜邦线连接至电机驱动模块,控制电机运转,进行存取车动作;部分控制控制监测模块,显示停车库当前状态;部分连接着微动开关模块,反馈信号给STM32芯片以控制电机位移量及升降量。
4.2 移动操作机制
监测模块通过STM32的部分引脚控制LED灯亮灭,包括对系统存车、取车和休眠状态系统和各个车位状态的监控。微动开关模块由行程开关组成,当堆垛机运动至正确位置时,前行程开关被触发,向STM32芯片发出信号,使堆垛机停止运转,并进行下一步动作。电机模块包括三个24V的减速电机,分别控制堆垛机左右移动、前后移动及升降三组动作,由电机驱动模块接收信号并放大以驱动电机运转,使堆垛机完成相应的动作。
4.3 实体操作流程
用户通过电脑发出存车指令,STM32与电脑通信后,向移动操作机制发出运转命令,监测模块的状态指示灯从休眠状态转至存车状态,操控左右移动的电机转动,触发行程开关,堆垛机将在STM32控制下完成从车位将车提起并放至载车板上的动作。此时再次触发行程开关,操控前后或升降移动的电机转动,同样通过微控开关模块传递给STM32的信号制动电机,完成堆垛机移动至目的车位位置的动作。
5 结束语
5.1 项目总结
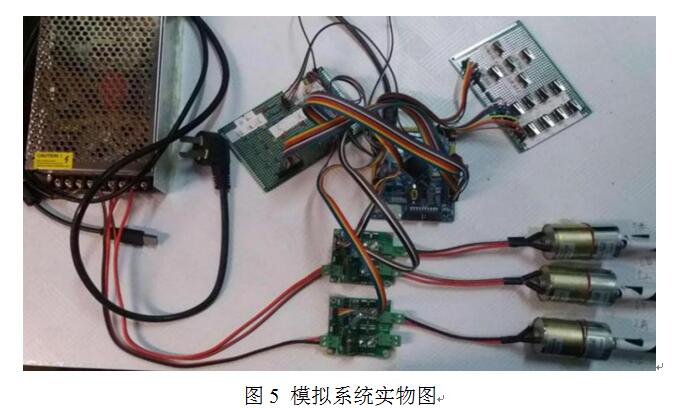
本文对当今立体停车库的发展现况进行调查,以巷道堆垛式立体停车库为研究对象,通过设计具体结构、编写控制程序、模拟实际运行等步骤对巷道堆垛式立体停车库进行了分析研究。通过组装一个模拟的巷道堆垛式立体停车库结构,借助STM32芯片编程控制,实现对巷道堆垛式立体停车库的模拟仿真。本系统便于调试和改造设计,在工程上有着很好的辅助作用,能一定程度上保证停车库研发和生产的高效性、安全性以及稳定性。模拟系统实物如
图5所示。
5.2 发展展望
本文对巷道堆垛式立体停车库进行了初步的分析与研究,为完善停车库系统,也为更好的适应实际运用需求,应在以下方向努力改进:
(1)当只有1台堆垛机工作时,在平峰期可满足用户需求,而在高峰期则会出现等候存取车的用户排起长队的现象,致使车库效率大大降低[4]。本设计加入了上位机设备,不仅提高了车库系统与用户的交互性,而且容易后期扩展功能。为解决高峰期降低效率问题,可加入预约取车系统,让用户能远程操控停车库提前将车辆从车位中取出,可减轻高峰期排队现象;
(2)当前立体停车库市场未来将会向两个方向发展,其一是价格导向,只要达到增加停车位的目的,保证最基本的使用性能,同时以价格优势快速占领市场;另一个立体停车库市场的发展方向是技术与性能导向,要求停车设备具有优越的使用性能、方便的操作方式、快捷的存取速度,对技术和性能的要求较高[5]。这便需要改进优化堆垛机结构,降低成本,采用先进控制系统理论算法,提高控制系统的稳定性、安全性和智能化。
参考文献
[1]袁壮.城市中心区立体停车库设计研究[D].湖南大学,2010.
[2]郭环,禹永伟.自动化立体仓库中堆垛机的设计[J].物流技术,2002(3).
[3]宋娇娇.单立柱巷道堆垛机的有限元分析与运动仿真[D].太原科技大学硕士学位论文,2009.7-9.
[4]朱德桥,李建国,郭佑民等.基于排队论的立体车库堆垛机效率分析[J].兰州交通大学学报,2009,28(03):62-64.
[5]邹振宇.我国智能立体停车库产业发展思考[J].安徽科技,2016(10):39-41.
作者简介
陈钰鹏 (1996-) 男 本科在读 研究方向:机器视觉与模式识别方向
通信作者
林聪 (1988-) 男 工学硕士 研究方向:智能控制与控制工程方向






共0条 [查看全部] 网友评论