



关键字:船舶通讯;智能航行;ANSYS
1 引言
国际与国内贸易量的日益增加对交通运输的效率、安全与节能提出了新的挑战。航运作为一种重要的贸易运输方式,如何提高其运输载体——船舶的智能化水平是亟待解决的关键问题。近年来,在传感、通信、计算机、信息、自动化、智能控制等技术的引领下,船舶智能化发展较快并取得了一些新的成果[1]。
在船舶智能航行方面,计算机技术、传感器技术、通信技术、信息技术的进步推动了船舶导航设备、自动化设备、环境感知设备的更新与升级,物联网技术、信息物理系统和大数据技术的应用加快了船船、船岸之间信息交互的发展,这为构建新一代综合船桥系统(Integrated Bridge System, IBS)提供了必要的基础。IBS的发展和人工智能的突破也为实现船舶无人驾驶提供了可能。
智能机器人、无人驾驶汽车、无人飞机的应用使无人控制理论与技术急速发展,作为船舶智能化重要的发展方向之一,无人驾驶在船舶上的实现也指日可待。虽然目前的IBS已具备简单的航线规划、自动避碰和航线跟踪功能,但距离真正的无人驾驶还有较大的距离。尤其是在内河水域,由于航道环境复杂多变、交通流密集,无人驾驶过程中对船舶的周围障碍物感知、路径规划和轨迹跟踪能力要求较高。
水上运输的主要特点是运量大,成本低,而内河运输受单艘船吨位上限的约束,无法提高单次运输总量,如图1所示。以南京长江大桥为例,由于南京长江大桥水面到桥身的距离仅为24米,巨型外轮无法通过,丰水期仅能通过3000吨级船舶。目前分布在南京市以上、重庆市以下长江江段的港口多达21个,由于巨轮无法通过南京长江大桥,这些港口基本闲置。于是,南京长江大桥变成了一把锁,从下游就锁住了长江这条横亘东西的水运大动脉。

大型船舶在人员配备、燃料消耗、运输效率等方面优势愈发明显,能够满足船舶运力需求,但是无法通过诸如南京长江大桥之类的桥梁。目前南京至芜湖的水位只有6至7米,就算没有南京长江大桥,最多也只能保证3万吨级的空载海轮到达芜湖,限制了实际通航船舶的运输量。芜湖至武汉之间水深条件可以通行万吨级船队,但单船不行,水深无法适合万吨级以上的海轮航行。而智能化无人船队很好的解决了这一问题,能实现以最少的人力实现最大的运输量。长江地形阶梯图如图2所示。
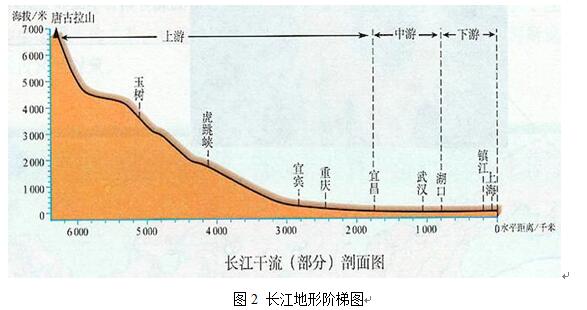
如图2所示,武汉以下的长江落差极小,流速降低,泥沙非常容易淤积,结果就是接近入海口的地方,水深反而迅速下降,导致长江航道上大吨位、深吃水船舶无法通过。
而如何提高船舶运送效率,成了船舶优化研究的一个重要方向。
2 船舶智能列队航行系统的设计思路
(1)提高单次运输量
以货运火车作类比,智能化船队的头船就相当于火车头,后面实现跟船的船舶相当于一节节车厢,只用控制好头船的运行方向,后面的无人船只用依照前船的轨迹航行即可,这样一次航行的运输量就可以提高数倍。
而智能船队更像是动车组列车,每个子船有独立的动力系统,则能有效提高运输效率,同时还避免了简单牵线连接在水运中不适用的问题。火车式队形运输如图3所示。

(2)较少人工劳动力
单调的航海生活、长期远离家人和陆地,使得船员这一职业缺乏吸引力,船员难招是不少海运企业面临的难题。而有了自动跟船技术,再大的货轮也无须配备大量船员,船队只需跟着头船航行。据统计,远洋货运44%的成本支出与船员有关,这不仅可以从很大程度上缓解远洋货轮船员短缺的难题,还能为海运企业节省一大笔船员薪水开支。
(3)提高水上运输的交通安全
船舶的智能化管理使管理人员能及时、准确和全面地掌握船舶的航行动态,预测水域中潜在的交通隐患,及时做出交通组织方案或应急方案,有效防止灾难的发生,最大限度地减少灾难损失。
3 模型船舶的实验设计
3.1 构建基于模型船的实验平台
模型船子系统的构建[2]
设计如图1所示模型船,购买材料部件后组装,并使其能够满足控制、定位、移动、状态信息反馈等试验所需条件。
定位方式的选择:
(1)模型船使用经济性较好的摄像头光源定位方式即可。对模型船子系统的标注如图4所示,船身前后用不同颜色的灯定位,两灯中点即船体位置,蓝灯方向即船头方向。
(2)验证项目可行后用数字化转换更为便捷,精度更好的GPS定位系统。

3.2 模型船实验平台的构建
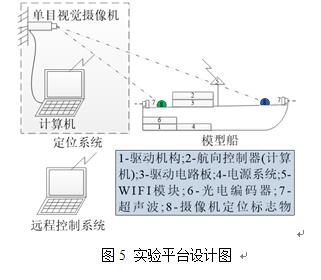
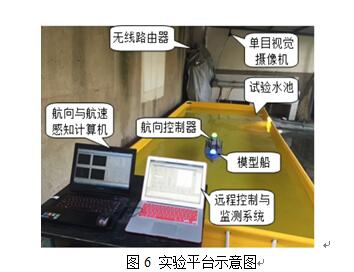
通过搭建如图所示的由远程控制终端、被控制模型船子系统及实验环境共同组成的实验平台完成实验操作。实验平台设计图如图5所示,实验平台示意图如图6所示。
(1)实验采用单目视觉摄像机配合船体上两个不同颜色灯来采集船体位置及运动方向信息。
(2)用无线路由器创造WIFI环境完成各船及远程控制系统之间的交互任务。
3.3 远程对船只的控制系统
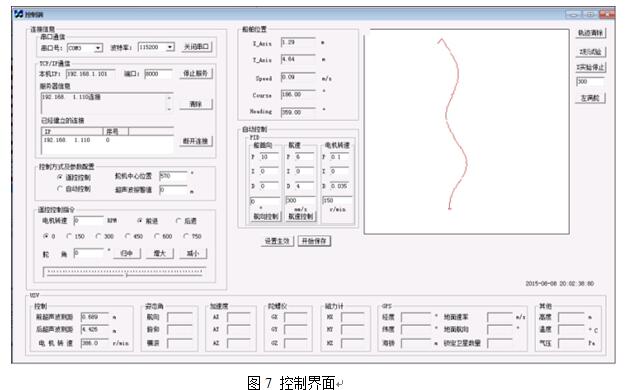
远程控制系统要求达到在远程控制计算机上能定量控制航速、舵角,能以图像形式反映船只航行轨迹及姿态[3]。控制界面如图7所示。
3.3.1 最佳跟行方式
已完成预设出三种可能实现的跟行方式,即方向跟行、轨迹跟行和动作跟行。现在通过对每种跟行方式的构想假设及实验验证寻找出一个最佳的跟行方式,可以是其中一种的优化改进,亦可以是其中几种的结合升华。以下将对三种基本方式分别阐述[4]。
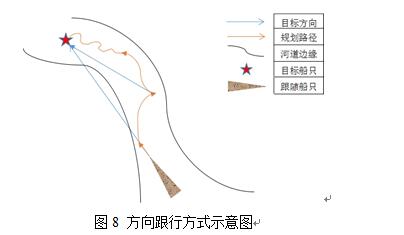
(1)方向跟随[5]
方向跟行是指后船始终以前船的定位为前进方向,而遇到障碍物时可以智能避开,计算出形成与前船不完全相同前行轨迹。类似于现有的车载导航,设定目标点后自行规划合理路径。方向跟行方式示意图如图8所示。
优点:在海洋等宽阔的海域航行时,后船路径有自主性,只要做到控制好两船间距离,即可省去前船路径中的不必要的弯路。而且后船自主性强必然能加大后船位置的浮动区间,即可提高船队系统的应急能力。
缺点:路径规划较为复杂,实现难度大,且在内河航道中障碍物较多,容易导致路径规划混乱。
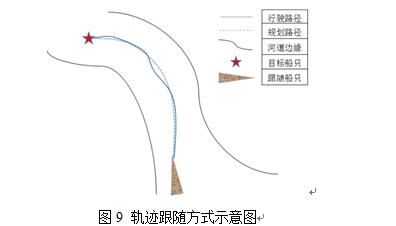
(2)轨迹跟随
轨迹跟行是指后船通过追随前船预留的轨迹来跟船行驶。轨迹跟随方式示意图如图9所示。
优点:船队行驶轨迹统一,前后船距离设定较为容易,在脱离船队后的自动回归上具有优势。
缺点:需要建立地图来确定前船的行驶轨迹,且后船无法完全贴合前船轨迹行驶,会在前船轨迹上有所摇摆,需要找到一定的提前量才能缓解摇摆过大的问题。
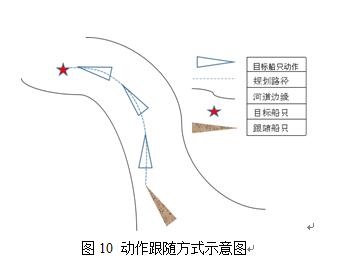
(3)动作跟随
动作跟随是指控制后船每一时刻的动作,使其与前船保持在同一状态下完成相同动作,从而达到理想中与前船走相同轨迹的目的。动作跟随方式示意图如图10所示。
优点:动作跟随可以简化后船的操控环节,且能使船队中各船的动作基本一致,便于管理。实现过程较之前两种方式都更为简单。
缺点:完全仿照前船动作,跟行船只缺少自主性,这就导致后船的应急能力需要特别考虑,或可配合前两种方式进行。
3.3.2 设定跟行距离
运用已有的关于LOS(视距line of sight)技术的研究。LOS测距方式示意图如图11所示。
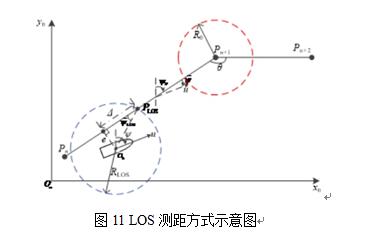
图11中,确定一条参考轨迹(reference trajectory)可认为是以时间作为自变量,路径点坐标为函数值的一条曲线。在欠驱动船舶运动控制过程中,由于需要处理多种约束(舵角限制、航速限制等),采用模型预测控制(model predictive control)计算系统最优输入。然后进行路径跟随,仅需要跟踪目标路径点坐标实现船舶对目标路径点的跟踪。船首向可通过控制舵角来实现,大大简化了控制过程。
4 结语
随着世界科技技术的不断创兴,无人化、智能化、一体化将成为船舶航行的一大发展趋势。通过基于VC/Matlab的软件平台,设计出一套行之有效的程序可供实现船舶运输的简单化。本文以模型船队为研究目标研究智能航行系统的仿真并进行实船测试。试用GPS、可视化、声波等多种定位方式,建立单船控制和列队控制模型,在计算机仿真研究的基础上通过模型船实验验证多种不同的列队航行方式,确定最佳的列队航行方式。本文开展将会为真实环境下实现列队航行提供理论和技术参考,在一定程度上提升航运运营效率,降低运营成本。
参考文献
[1]齐绍江.未来20年无人船舶展望[J].世界海运,2005(03):1-3.
[2]江丽君,邱铖铖,郑卫刚.基于互联网+的无人环保船舶系统设计与研究[J].变频器世界,2017(01):96-97.
[3]闫雨石,鞠文博.船舶无人驾驶技术中的数据融合应用技术[J].舰船科学技术,2016,38(20):1-3.
[4]孙健,贺同辉,秦敏.无人多功能海事船控制平台设计与物联网的构建[J].舰船科学技术,2016,38(16):160-162.
[5]李光正,王涛,张国勇.基于物联网体系的智能船舶设计[J].船舶工程,2012,34(06):59-62.
[6]李玉珠,郑卫刚.浅谈一流大学工程训练中心软实力及巧实力建设[J].网友世界2012.12:56-58.
作者简介
郑卫刚 (1967—) 技师 研究方向:机电技术






共0条 [查看全部] 网友评论