



1 引言
输电线路覆冰和积雪常会引起线 路的跳闸、断线、倒杆、绝缘子闪络和通信中断等事故。世界各国都曾因输电线路覆冰引发安全事故,给各国带来了巨大的经济损失。而传统除冰方法效率低下而且安全性不高,因此研究新型的除冰方法替代人工除冰就变得十分迫切。除冰机器人是一种实现自动在线除冰的新装备,得到了研究人员和电力公司的广泛关注。但是它的运行环境非常复杂,需要解决许多关键技术难题,尤其在机器人的自主越障机构、传感器与控制等方面,是制约除冰机器人研究进展的主要因素。本文以除冰机器人的在线行走与越障为应用背景,研究利用视觉传感器为主要传感器的视觉控制方法。基于视觉的机器人控制是通过对视觉信息的分析与处理来感知环境,并利用视觉信息引导和控制机器人完成给定的任务。
2 超高压巡线除冰机器人总体方案设计
2.1 工作原理
本设计采用四轮式结构,具有除冰效率高、安装方便、小型轻质、适应恶劣环境强的特点。
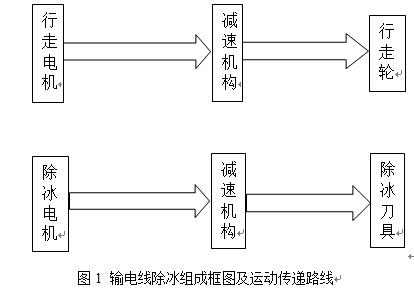
本设计采用四轮式结构布局,具有小型轻质,除冰效率高,安装方便,适应环境能力强的特点。工作原理就是由行走电机推动机器行走,通过大齿轮带动轴转动,实现输电线除冰机在电线上行走。工作电机通过轮转动,驱动工作刀具做回转运动。输电线除冰组成框图及运动传递路线如图1所示。
2.2 驱动方式选择
(1)小型柴油机驱动
柴油机驱动特点是马力大,适用环境范围广,但是所需要的工作空间过大,工作状态下会产生很大振动,引起输电线的晃动,不能在输电线路上行走,还有柴油机驱动不环保,对环境造成污染。
(2)电动机驱动
电机可以选择很多型号,在振动和质量方面都有很大的优势,对环境没有污染,很环保。
2.3 传动方式选择
(1)带传动
抗拉强度较大,价格低,耐湿性很好,能够传送较大功率,但由于工作空间要求较大,不适用于急速反向传动和受空间限制的工作场合。
(2)链传动
安装链传动的精度要求低,链轮齿能够承受较大的作用力,中心距大,有一定的减震功能,可以适应恶劣环境,但是但由于工作空间要求较大,同样不适用于急速反向传动和受空间限制的工作场合。
(3)齿轮传动
齿轮传动的传动比是定值,传动比范围内能够实现增速和减速;传动效率高,效率可达99%以上;传递功率和速度和范围广,用于高速(v>40m/s)、中速和低速(v<25m/s)的传动;功率从小于1W到105kW;结构紧凑,适用于近距离传动。
(4)蜗杆传动
蜗杆传动用于交错轴间传递动力。传动比大,传动平稳,结构紧凑,噪声小;效率低,容易发热,蜗轮材料要求是减摩性的有色金属。
带传动和链传动适用环境范围广,但是工作空间较大,不适用于输电线除冰机。蜗杆传动传动平稳,结构紧凑,因此,在各种因素的综合考虑下,输电线除冰机采用蜗杆传动机构。
2.4 行走方式选择
(1)履带式
履带式行走机构广泛应用于拖拉机等野外作业机械,具有足够的强度和刚度;具有良好的转向和行走功能。但是这种行走方式很笨重,不适用于输电线除冰机构。
(2)轮式
轮式行走机构广泛应用于火车、汽车、航空等交通工具,能在大多数的路况下工作,应用范围很广。由于这种传动机构的轻质性,所以便于装配和携带使用。
(3)液压缸式
相同的功率下,液压执行机构结构紧凑、体积小、重量轻。液压传动各元件可以灵活布置。液压装置工作稳定,由于体积小、重量轻、反应快,所以能够快速启动、制动和频繁的变向。液压元件通用化、标准化、系列化,方便制造和使用。但是元件受温度变化的影响,不适用在温度过高或过低的工况下工作。由于流体流动的阻力,所以效率很低。当发生流体泄漏时,不仅污染环境,还有可能引发爆炸和火灾事故。
履带式传动方式很笨重,不适用在输电线上工作;液压传动很复杂,也不适用于输电线除冰机。因此选用轮式机构,本设计为了使除冰机在输电线上行走时更加的平稳,特在行走轮中间开通一个直径为30mm的凹槽。
2.5 除冰方式选择
(1)加热除冰
通过喷火加热或者电阻加热,使冰融化,达到除冰效果。这种方法效率很高,对环境也不会造成任何影响。但是成本很高,耗能过多。
(2)化学法除冰
化学法融冰是通过固体或液体的化学药剂使冰融化,这种方法的特点是效率高,但是成本也很高,化学药剂对环境也会造成影响,尤其是钠盐融雪剂对钢筋混凝土结构有腐蚀作用,很容易造成混凝土路面表皮破坏,影响输电线的使用寿命,对植被造成损害。
(3)振动除冰
振动除冰是通过马达使一定重量的除冰锤做上下周期的敲击,敲击到的覆冰因为振动就会与电线脱离,以达到除冰目的。这种方法效率很高,成本低,效果也很好。但是工作状态下会造成电线的持续振动。
(4)对滚铣削除冰
对滚铣削式除冰工作装置安装在除冰机前端,通过前压轮刀片,在较高转速下将覆冰铲除。这种方法效率高,效果很明显。
加热法除冰不仅需要很重的能源储备装置,而且耗能过多,因此不适用于输电线除冰机。化学法除冰对输电线和环境的影响都很大,因此也不适用。振动法除冰会造成电线的持续振动。最后采用对滚铣削除冰法。
(5)行走轮同步行走方法与减震方法
行走轮主要负责推动除冰机在输电线上的行走,倒挂在电线上的上端行走轮是提供除冰机一个拉力,让除冰机能够挂在输电线上。下端行走轮靠电机直接驱动,负责除冰机的前进。确保除冰机能够行进的足够平稳,将下端两个行走轮通过链传动连接,这样下端行走轮就能够同步。另外,对滚刀具除冰后的输电线可能还会存留小面积的冰块,所以行走轮要具备一定的越障能力,能够轻松跨过小块覆冰。为此,本论文还设计了减震机构,保证行走轮能够轻易跨过小块覆冰。
通过对以上方面的对比和研究,综合考虑:本设计采用电机驱动,蜗轮蜗杆传动机构,轮式行走方式,对滚洗刀除冰方式。
3 绕线压紧传动机构设计
3.1 绕线电机的选择
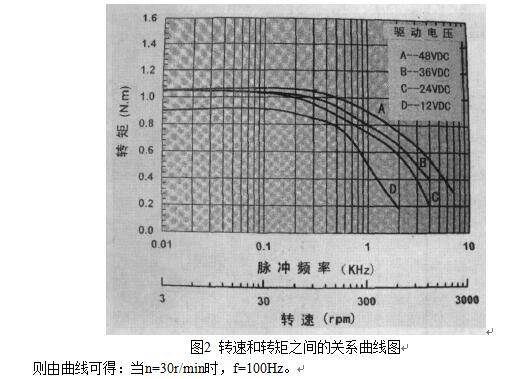
步进电机操作和维修都很方便,而且实现了全数字化控制。根据设计要求和实际应用情况我们选择步进电机,需要选择的参数是:额定电压、电机转速、输出扭矩等。拟采用的57系列两相混合式步进电机使用24V电压,24V直流电源可以满足电机需求。输出扭矩与传送带和支撑板的摩擦力有关,主要由板料重量和传送带的摩擦系数决定,此外,还和传送待与滚轮间的摩擦力有关,由于摩擦系数很小,虽然传送带和滚轮间的张紧力很大,但是总的摩擦力还是很小,所以忽略不计,图2列出了转速和转矩之间的关系曲线图[10]。
根据计算结果我们选择电机型号为:57BYJ250C。
3.2 蜗杆传动设计计算
3.2.1 选择蜗杆、蜗轮材料
(1)选择蜗杆传动的类型
采用准平行环面蜗杆传动
(2)选择蜗杆、蜗轮材料,确定许用应力
蜗杆传动一般传递的功率不是很大,而且运行速度中等,查表《机械零件课程设计》,选用45钢蜗杆,为了提高传动效率,要求蜗杆螺旋齿面具有较好的耐磨性,蜗轮选用45钢,为了减少贵重有色金属的使用,仅齿圈用45钢铸造,轮芯用灰铸铁HT100制造。
查得蜗轮材料的许用接触应力:
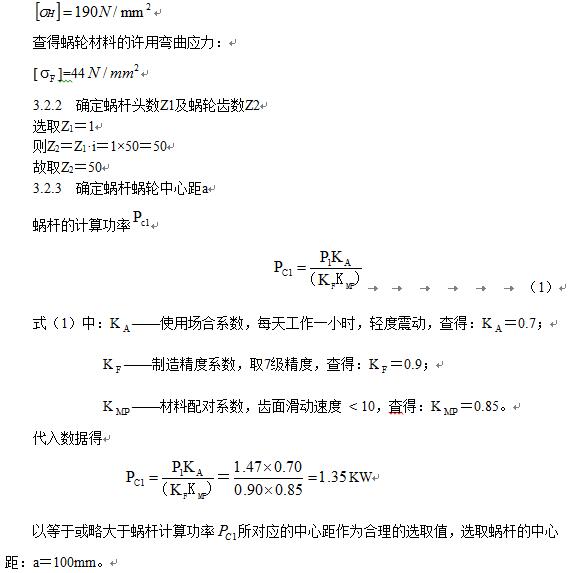
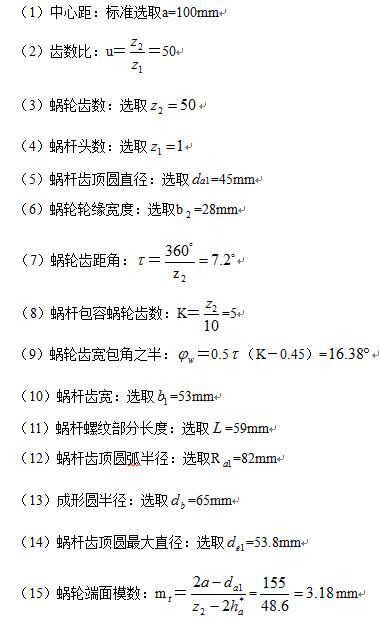
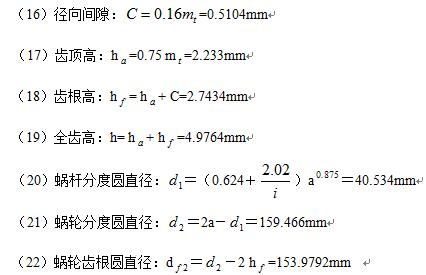
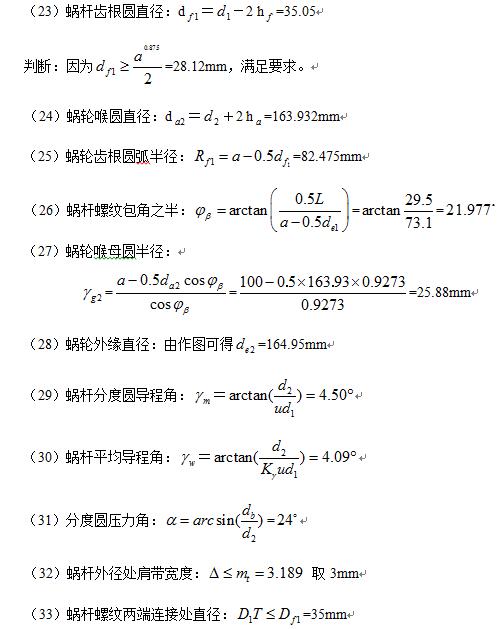
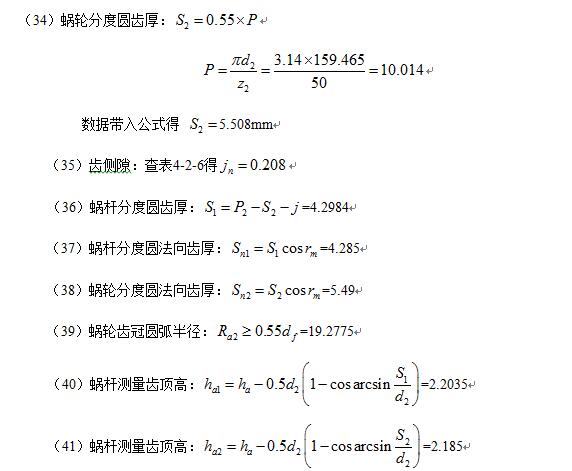
3.2.4 蜗杆传动几何参数设计
准平行二次包络环面蜗杆的几何参数和尺寸计算如下:
4 数控硬件电路设计
数控系统由硬件和软件两部分组成,硬件和软件处理信息的任务是等阶的,硬件处理信息速度快,线路复杂,软件适应性强,但速度较慢。现在数控向着软件控制方向发展。
数控系统的核心是位置控制,最重要的运算是插补运算,最主要的数据处理是刀具补偿。位置控制是通过指令位置和实际位置进行比较,用位置偏差进行控制;插补运算是根据加工程序所确定的坐标点,通过一定的运算法则实时获得位置指令;刀具补偿就是要解决编程轨迹和刀具中心不相符的矛盾。
4.1 硬件电路设计
4.1.1 数控系统的硬件结构
数控系统一般分为单微处理器和多微处理器结构两种。单微处理器控制系统的结构简单,价格较低,所以应用广泛。多微处理器数控系统具有高转速、高精度等优点,是当今数控发展的代表。本设计采用单微处理器数控结构,其精度和速度能够满足实际的切削加工要求。
单微处理器硬件结构电路包括如下的几部分:
(1)中央处理单元CPU;
(2)总线,包括数据总线、控制总线和地址总线;
(3)存储器,包括只读可编程存储器和随机读写存储器;
(4)输入输出接口电路;
(5)外围设备,如键盘、显示器及光电编码器等。
4.1.2 数控系统硬件电路的功能
根据设计要求,确定数控系统应具有以下功能:
读取键盘输入数据;
读取操作面板开关及按钮信号;
控制纵向、横向电动机驱动;
控制主轴正转、反转与停止;
控制交流变频器;
控制冷却泵启停;
可与PC进行串行通信。
本次设计采用8031作为主控芯片,采用两片2764程序存储器之外,还扩展了一片6264数据存储器,用一片74LS373锁存P0口传递低8位地址,地址译码采用74LS138(3~8译码器);采用全地址码,采用二个8155芯片,完成对执行元件的控制。此外,还设有越界报警急停处理电路。
4.2 关于各线路元件之间线路连接
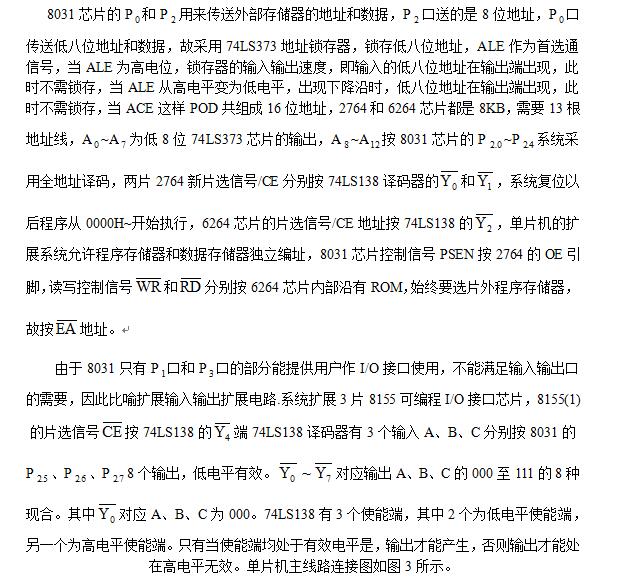
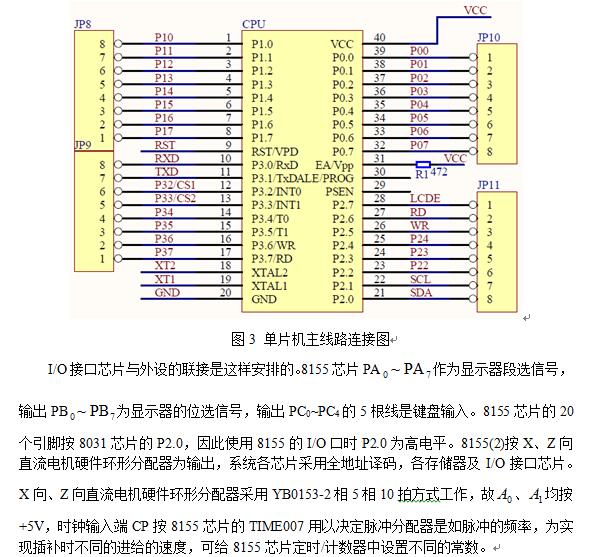
4.3 关于电路原理图的一些说明
在此电路图中,还有其他功能电路,如报警电路,急停电路,复位电路,隔离电路,功效电路等,此外还有对自动回转刀架,螺纹加工进行控制。
±X、±Z方向的越界和急停信号经过门引入8031的P3.2中断原LNT0,采用硬件申请中断软件查询的方法。这样无论哪个方向都能引起中断,当±X、±Z等一越界,则相应的红灯亮报警。
5 结语
此次设计设计主要确定机器人的工作原理、驱动方式、传动方式、行走方式、除冰方式、电机的选择以及轴的选择。本次设计区别与以往除冰机器人是增加了检测装置,让越障更加智能化。确定蜗杆头数、涡轮齿数、各轴的中心距,选用不同的轴承,画出除冰机器人的整体装配图、越障部分装配图以及远程控制电路图。根据之前数据再画出各个部分的零件图,最后进行蜗轮蜗杆和轴的校核。
参考文献
[1]曹文明.高压输电线路除冰机器人视觉控制方法研究[D].湖南大学, 2014.
[2]张屹,邵威,等.高压输电线路除冰机器人的机构设计[J].三峡大学学报(自然科学版),2008,30(6):69-72.
[3]侯文琦.输电线路除冰机器人本体设计与越障动力学分析[D].国防科学技术大学, 2009.
作者简介
王飞 男 硕士 研究方向:机械工程






共0条 [查看全部] 网友评论