


关键字:路径规划;SAD;机器人
1 介绍
由于独立机器人无需人工干预就能达到预期效果,因此在军事、医疗、ATM等区域正在大量利用机器人。例如在某种加工生产过程中,为了从托盘中拾取相关工具,并根据加工工具的类型将工具放入不同的托盘内,使用基于视觉的机器人操作系统来识别工具在托盘中的位置,通过计算机人机交互系统及时处理并识别相应动作的自动定位和提取是首要条件,使用基于规则的方法识别动作,每当特定图像帧上的三个区域与预定义的动作匹配时,固定在机器人上的无线摄像头将在其观看范围之前拍摄图像,目标跟踪由SAD算法实现。使用绝对差和(SAD)算法来实现所提出的图像处理算法。它适用于图像减法的原理。所开发的算法通过基于变化的运动目标检测方法实时验证。机器人的路径规划是机器研究领域中具有挑战性的领域之一。智能系统被认为是具有与传感器-检测器系统连接的天线的装置/机器人。基于模型的编程解决了嵌入式系统编程的复杂性,传感器,执行器和控制处理器之间的交互使用MATLAB和机器人的图像处理由8051微控制器实现所需的路径安排。
2 控制系统思路
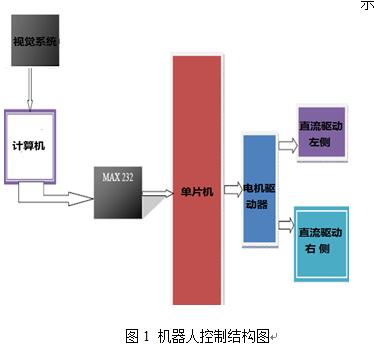
摄像机捕获到机器人规划路径的图像,传送到计算机进行处理。基于图像减法的算法,将比较当前和之前的图像。根据像素的差值,移动路径上的非零或零对象将被识别。这个路径信息将通过MAX232电平转换器发送到8051微控制器。微控制器对数据进行解码并相应地将命令发送给直流电机(机器人),机器人将按照指定路径运行。视觉和嵌入式机器人框图如图1所示。
3 控制流程
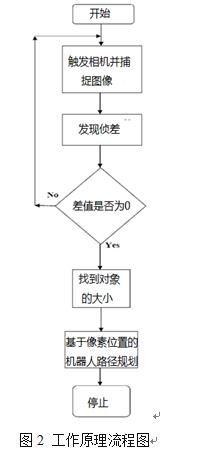
摄像机捕获视频(转换成图像),将彩色图像转换为二进制图像以便进一步处理,确定当前图像和以前的图像之间的差异。在比较过程之后,如果差值不为零,则识别新的物体,如果差值为零,使用MATLAB软件根据像素位置方法找到对象的位置,从而建立机器人的正确路径。机器人路径规划工作流程如图2所示。
4 识别过程分析
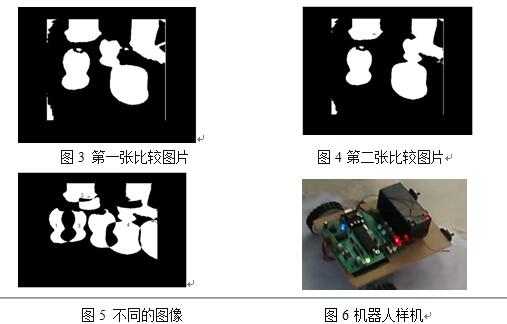
你要通过机器人的路径来跟踪物体,应该确定物体的位置,对于图3所示当前图像应用SAD算法和图4所示的图像、图5所示图像的结果进行比较,确定机器人运动方向,机器人的最终原型将要向右移动,如图6所示。
5 结论
依赖于图像处理和基于单片机的嵌入式系统机器人路径规划,应用SAD算法确定机器人路径中的运动目标,从而能够使机器人通过避开目标位置来到达目标而走自己的路。
参考文献
[1]刘华军,杨静宇,陆建峰, 等. 移动机器人运动规划研究综述[J]. 中国工程科学,2006(01).
[2]Tirtharaj Dash, Goutam Mishra and Tanistha Nayak. A Novel Approach for Intelligent Robot Path Planning[J]. Proceedings of National Conference in AIRES-2012, Andhra University, India,2012:388-391.
[3]汪珍珍,赵连玉,刘振忠. 基于MATLAB与OpenCV相结合的双目立体视觉测距系统[J]. 天津理工大学学报,2013(01).
作者简介
韩亚军 (1983-)男 副教授 研究方向:电机控制方面教学与研究




共0条 [查看全部] 网友评论