


关键字:单片机;智能机器人;运动控制
1 引言
智能机器人是目前自动化装备和先进制造技术的代表,是人造机器的最终极形式。机器人涉及到电子、机械、自动控制、人工智能、计算机、传感器、网络与通讯等诸多领域和学科,是诸多高科技发展成果的集成,因此智能机器人的发展与许多学科的发展都密切相关[1]。
目前单片机技术是自动控制技术的核心发展方向之一,已被广泛的应用到智能仪器、工业控制、机电产品和家用电器等。微电子技术的不断迅速发展,使得单片机的功能也变得越来越强大了,本文采用单片机技术和红外技术设计完成了智能机器人的运动控制系统。机器人的智能研究在当今机器人的研究领域中有十分突出地位, 其特点是可对环境进行感知、进行决策判断和人机交互等功能[2]。本文智能机器人控制系统主要实现了避障、步行、跟踪、步伐调整、声控、语音、液晶显示和地面探测等功能。当遇到外界环境发生变化后,机器人将采用不同措施来对待,可较好的实现该机器人的思考能力。
2 智能机器人系统简介
2.1 系统框图
本文所设计的智能机器人控制系统使用两片AT89C52单片机进行控制,使用一片AT89C52单片机MCU1对整个系统进行控制,使用另一片单片机驱动液晶屏LCM1602显示工作,两个单片机间通过I/O接口进行通讯,从而实现单片机间的共同工作和相互协调控制[3-4]。如图1所示是控制系统框图。
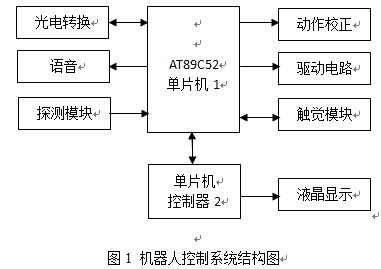
本文设计中,将单片机1的P1.0~P1.3分别用于接触觉传感器,P1.4和P1.5分别用于接视觉红外传感器,P2.0和P2.4口用于控制继电器的驱动电路,P2.5接口用于接探测传感器,P2.6和P2.7接口用于接步伐校正器,P3.0~P3.5接口用于接语音芯片。
2.2 功能介绍
智能机器人在行走过程中,会发出相关的语音提示如:“正在搜索目标中”,同时液晶屏上也会有文字显示如:“Target is in searching”;若再前进的过程中发现了目标,语音会发出相关提示如:“已发现目标”;同时液晶屏上也会显示文字如:“Find object”,智能机器人自动的向目标转动;当对准了目标以后,语音会提示:“锁定已目标”,同时液晶屏上显示:“Lock it”,若同时智能机器人还向目标继续的前进;若机器人突然的撞上了目标,则语音会提示:“前方存在障碍物”,液晶屏上显示:“Obstacles Impending”,智能机器人将根据前方触角的碰撞顺序,向相反方向转动90度,然后继续的前进;当前方的地面出现了塌陷或断层,则语音会提示:“前方危险”,同时液晶屏上显示:“Warning,fault ahead”,此时机器人将会后退几步,然后转向后方继续前进;若机器人在转向的过程中,步伐出现错乱,会自动的执行步伐调整程序,以校正错误的步伐[5]。
3 控制系统设计
3.1 单片机驱动电路
机器人若想有稳定的行走能力,需选择相对稳定的电机驱动系统。本设计利用了三极管放大电路对单片机的I/O口的输出电流进行放大,然后驱动继电器动作控制电动机的转动。此设计不会对输入的电流产生任何的影响,并可给电机提供足够大的电流,进而保证了电路的工作稳定。
本设计的电机驱动电路采用两个NPN三极管对单片机AT89C52的I/O输出接口电流进行放大,并利用电阻作为此三极管的基极进行保护。当I/O口有输出信号时,电流将经过电阻后再进入第一级三极管的基极,从而使第一级的三极管导通,导通的电流经电阻后再送入到第二个NPN三极管的基极,进一步的进行电流放大,从而达到继电器的驱动电流。根据计算得出,进入到继电器的电流经两级放大电路后电流放大了约2倍,9014在此做开关作用。经过两级放大后驱动继电器。
每个继电器都相当于一个单刀的双掷开关,所以,两个单刀的双掷开关,就组成了电动机的正反转控制电路,从而实现了智能机器人的前进和后退行走动作。
3.2 触觉电路
在本设计中,不仅完成智能机器人发现和跟踪目标,还需识别到目标位置。因此本文采用了红外线的反射传感器作为机器人的视觉功能,用于机器人检测到前方是否有目标。该功能的实现主要是采用两个型号的TX05D红外线反射传感器。红外反射式的接近开关,其内部有一个红外线的发射管和一个红外线的接收管。发射管可向外发出红外线,若其前方没有物体时,接收管将接收不到发出的红外线信号。当前方有物体出现时,红外线信号会经过物体反射回来,此时接收管将接收到红外信号,同时向单片机输入高电平的信号。
将两个红外线的传感器分别安装于智能机器人前方两侧,当机器人开始工作时,2个红外传感器将不断向外发射红外线信号,当传感器接收到了红外反馈信号时,将向单片机送入高电平的信号,单片机就可判断该方向已发现目标,单片机再经过判断计算后,就可控制电动机转向,从而实现跟踪。当2个红外传感器都感应到了目标后,智能机器人将向着目标前进,直到撞到目标为止。
3.3 校正步伐电路
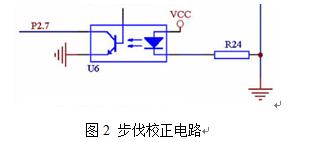
当智能机器人在前进的过程中,若电机的转速不一致或在转向的过程中步伐出错,此时便启动步伐校正功能,此功能主要是利用了两个光耦来完成的。在机器人的下部,装有两片挡片,当智能机器人正常的行走时,挡片会交替关闭和打开光耦。若两个光耦状态始终都不相同时,就说明机器人的步伐正常。当光耦状态相同时,则机器人的步伐出现错乱,需要立即校正步伐。这时会随机的停下一条“腿”,等到另一条“腿”走到在了合适的位置,则光耦状态相反时,再同步前进。如图2所示为步伐校正电路。
3.4 语言提示电路
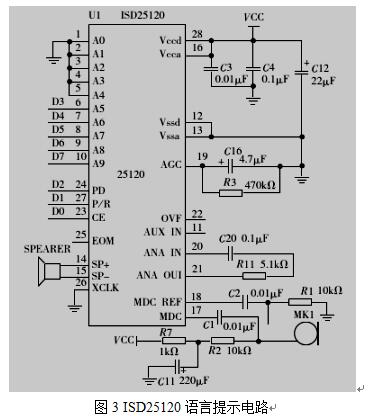
本设计中为了增加操作的准确性,运用了声音提示作为保障,本系统采用了美国ISD公司的ISD25120语音芯片,录放时间可达到120秒,可同时运行多段的信息处理,并可反复的录音十万多次,并且改语音芯片在使用时无需考虑驱动,只需用C52单片机控制该语音芯片电路的触发时间,并播放出先前已录好的声音文件,从而实现智能机器人的功能[6]。电路如图3所示。
3.5 光电转换
智能机器人选用光敏电阻作为光敏传感器,它的阻值受照射在它上面的光线强弱的影响。所用的光敏电阻的阻值的暗电阻为几百千欧,室内光照度下为几千欧,阳光或强光下几十欧。将光敏电阻和10kW 的电阻R13 串连后构成分压器。左右两个光敏电阻分别与单片机的模拟输入口相连,在单片机系统中采集光敏电阻上的电压值。光暗时,光敏电阻上的电压接近5V,光强时,接近0V。将左右两个传感器的输出电压值进行比较就可以知道光源的位置是在在机器人的左前方还是右前方。
4 总结
本文所设计的智能机器人系统可模拟人类的听觉、视觉、语音、触觉和简单的思考能力,在一定程度上实现了机器人的最基本的人机交互和显示功能。本系统利用了AT89C52单片机间的较好通讯简单的处理了各个传感器间的协调问题,以及各传感器间的优先响应问题。
参考文献
[1]马文婷.基于MEGA64单片机的智能搬运机器人设计[J].科技信息,2011, 30,20-24.
[2]李蒙, 毛建东.单片机原理及应用[M]. 中国轻工业出版社,2010.
[3]哄永潮,韦魏.移动机器人红外避障和单目视觉跟踪的研究[J].机电工程,2006,23(6):60-62.
[4]颜兵兵,任福君.供你机器人避障运动分析机器仿真系统[J].科技导报,2008,26(5):56-59.
[5]柴旺兴,赵文兵.基于红外传感器的智能车电机调速系统设计[J].中国科技信息, 2009, 2, 30-35.
[6]张立勋,付连芳. ISD25120语音芯片在机器人控制系统中的应用[J].微型机与应用,2002,3, 20-28.
作者简介
姜洪发 (1983-) 男 中级工程师 研究方向:自动化控制方向




共0条 [查看全部] 网友评论