



关键字:灭火;电机驱动;传感器
1 引言
基于人工智能的不断发展,各项高新技术的不断成熟,在可预见的将来,消防机器人在功能上会更具多样特点,在较多危险区域可以完全代替消防员,避免消防员生命伤亡[1]。同时也应该看到,我国在研究消防机器人方面较国外同行已落后太多,存在技术差异和代沟,消防机器人的不断研制、生产和装备过程,应坚持自主研制为主,引进为辅,提高我国消防部队消防装备现代化的水平,并及时装备消防部队,提高消防部队打赢大仗、恶仗、硬仗和特殊战役的能力[2],提高消防部队在处置大型复杂火灾和应急救援的作战效能,提高消防部队的自我防护能力,减少消防指战员的人身伤亡,更好地保卫我国经济发展[3]。
2 总体设计方案
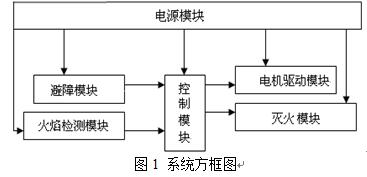
设计一个简易灭火机器人模型,能到指定区域进行灭火工作(以蜡烛模拟火源,分布在机器人行走的场地中)。机器人必须通过内部设备采集现场环境情况进行分析并做出相应的动作,以达到机器人智能灭火的目的[4]。本系统主要由控制器模块、电源模块、直流电机及其驱动模块、避障传感器模块、避障模块、火焰传感器、灭火系统及其驱动等模块构成,本系统的方框图如图1所示。
3 硬件电路设计
3.1 单片机主控电路设计
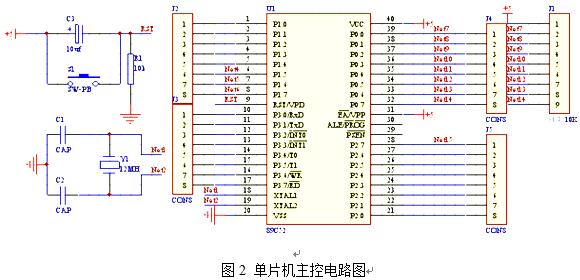
单片机主控电路设计是以AT89S52为核心,外接红外避障传感器模块、红外火焰传感器模块、L298N电机驱动模块、三极管开关控制继电器驱动风扇灭火模块、电源模块等硬件电路。AT89S52工作在12MHz的频率下,采用+5V的直流电源供电,根据单片机各个引脚功能,P0.0-P0.5为红外火焰避障传感器模块和红外火焰探测传感器模块,P0.6接自动和遥控切换模块的开关。P2接L298驱动行进电动机模块和继电器驱动风扇灭火模块。P1.0-P1.3接无线遥控信号模块。S1为复位开关。单片机主控电路图如图2所示。
3.2 电机驱动电路设计
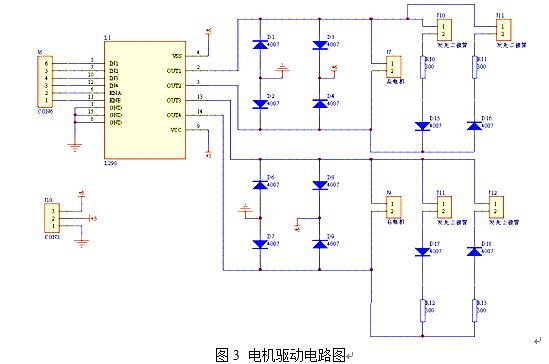
用L298N驱动电路如图3,该电路由L298和4007二极管和发光二极管(红、黄)及电阻组成,IN1-IN2为输入,对应的输出为OUT1-OUT2(左电机);IN3-IN4对应OUT3-OUT4(右电机)。ENA和ENB分别对应OUT1和OUT2的脉冲宽度调节(PWM),调节ENA和ENB的PWM可以实现对2个电机的速度进行调节控制。二极管构成稳压保护电路,发光二极管是对应电机的正反转指示灯,这样在调试时,在不涉及调速的情况下,可以看得出电机的运转情况。
3.3 火焰检测电路设计
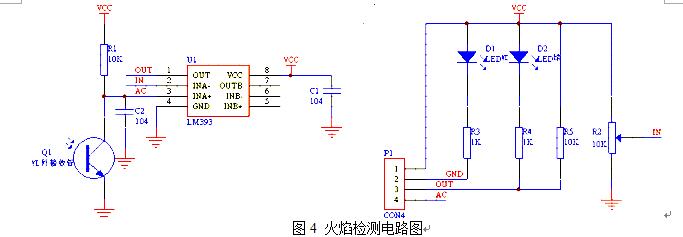
红外线火焰检测电路如图4所示。当红外线火焰传感器模块,检测到有火时,输出为低电平,然后把这个信号送给单片机,由单片机来控制小车行进路线。
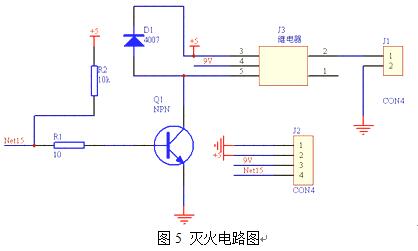
3.4 灭火电路设计
采用继电器来驱动灭火风扇,原理图如图5所示。电路由1个NPN三极管8050,保护二极管,电阻和6V的继电器组成,J2为插针,J1连接灭火风扇。Net15连接到单片机的P2.7脚,P2.7初始赋值为低电平,当单片机输出低电平信号时,三极管不导通,抽水电机不工作;当单片机给高电平信号时,三极管导通,继电器线圈吸合,常开触点闭合,9V电源导通,给电机供9V电压,风扇灭火。当火扑灭以后,单片机重新给回低电平信号,线圈断开,常开触点断开。
4 软件设计
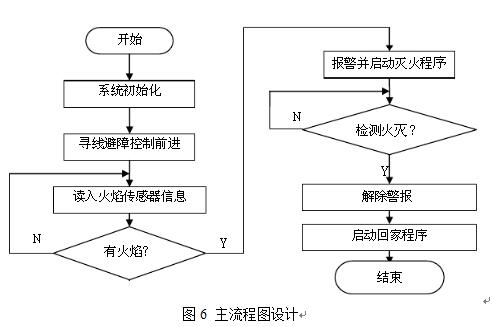
用左手法则搜索整个房间,可以容易地检测到房间各个角落,避免出现检测盲区。在机器人行进过程中检测火焰,一旦发现火焰则切换到趋光程序,计算火焰位置,准确定位并启动风扇灭火,灭火后检测火焰是否被扑灭,确定火焰被扑灭后回到发现火焰的位置继续搜索房间,直至扑灭所有火焰后启动回家程序,回到原始位置。
5 结束语
消防机器人的智能寻火,是通过火焰传感器对火焰的检测,将信号送给单片机处理,再将信号送给L298N电机驱动模块使行进电机做出相应的动作。
参考文献
[1]徐振亚,姜树海.森林消防机器人执行机构的设计与仿真[J].制造业自动化,2017(12):58-59.
[2]倪银堂,吕迪洋,王振豪.消防机器人的研究现状综述与展望[J].自动化应用,2017(2):72-73.
[3]王哲,孙洪超,张皖军.基于单片机灭火机器人的设计[J].农机使用与维修,2017(10):58-60.
[4]宋凯,董大正,沈锎洋.国内外消防同行迎盛会[J].中国消防,2017(9):105-106.
作者简介
张建平 (1983-) 女 副教授 硕士 研究方向:电子信息






共0条 [查看全部] 网友评论