
关键字:六足机器人;STM32F429;闭环自动控制;工厂巡检
1 引言
目前,机器人按照行走的方式可以分为轮式机器人、履带式机器人和足式机器人。其中轮式机器人具有速度快、易控制、稳定性好等优点,但对路况要求高,例如要求地面相对平坦、连续,环境适应能力较差,另外避障能力也不好。履带式机器人稳定性好,野外作业能力强,但是体积相对较大,对路况也有一定的要求[1]。
足式机器人具有良好的机动性,可以利用非连续的地面支撑,在有限的立足点时,可以选择一些离散的点作为立足点,并且可以通过调节腿的伸展程度来调整身体姿态和重心的位置,不易翻倒,稳定性好,所以足式机器人对路况要求不高,可以是不连续的地形。因此足式机器人可适应各种非结构地面和恶劣环境,可实现多种步态,灵活越障等优点[1]。
针对工厂实际环境,我们设想使用六足步行机器人,搭载反馈控制传感器以实现对六足机器人的自动闭环控制,搭载数据采集传感器以实现对工厂环境的监测。
2 实现方案
2.1 机械机构及步态设计
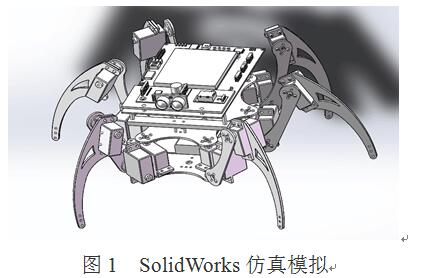
“六足纲”昆虫(蟑螂、蚂蚁等)步行时,一般不是六足同时直线前进,而是将三对足分成组,以三角形支架结构交替前行。身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架。当一组三角形支架中所有的足同时提起时,另一组三角形支架的三只组原地不动,支撑身体并以中组为支点,前后胫节的肌肉收缩,拉动身体向前,后足胫节的肌肉收缩,将虫体往前推,因此身体略作以中足为支点的转动,同时虫体的重心落在另一组“三角形支架”的三足上,然后再重复前一组的动作,相互轮换周而复始。这种行走方式使昆虫可以随时随地停息下来,因为重心总是落在三角支架之内。这就是典型的三角步态行走法。三角步态,是β=1/2时的波形步态,运动时六腿呈两组三角形交替支撑迈步前进。其行走轨迹并非是直线,而是呈“之”字形[2]。SolidWorks仿真模拟如图1所示。
2.2 运动控制系统
2.2.1 语音控制
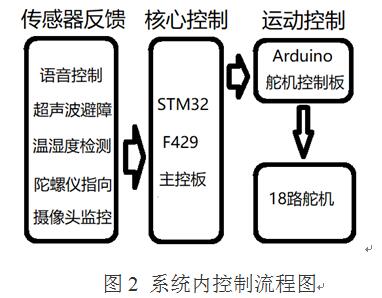
语音识别技术(ASR)是机器通过识别和理解过程把语音信号转变为相应的文本文件或命令的高技术。语音识别本质上是一种模式匹配识别过程,语音识别过程基本包括语音信号的预处理、语音的特征提取、训练和识别4个部分[3]。通过串口通信(通信波特率为115200)的方式利用YS-LDV7语音识别模块实现对多个动作组的语音控制,包括动作切换等等;语音识别环节分为一级和二级指令,一级指令为“请准备”,二级指令包括“前进”、“后退”、“左转”、“右转”、“停止”等,只有当一级指令成功识别后,二级指令才能被接收并成功识别一次,从而比较严格的实现“一对一”指令识别系统。系统内控制流程图如图2所示。
2.2.2 超声波控制
通过给STM32F429控制板安装外置超声波传感器和舵机(用于指示蜘蛛头部方向),从而通过AD转换环节实现对超声波左前后三个方向距离的采样、量化、编码,最终通过电容屏显示并通过用户设定的蜘蛛行走的安全范围利用舵机头部转向指示和串口通信实现相应动作组的切换,从而达到蜘蛛通过智能检测并分析的自动化控制行走环节。
2.2.3 陀螺仪指向
MPU6050六轴传感器芯片集成3轴MEMS陀螺仪和3轴MEMS加速度计,每个轴对应有一个16位AD转换器,测量范围达±16g,其高分辨率(3.9mg/LSB)能够测量不到1°的倾斜角度变化。芯片正常工作时,陀螺仪和加速度计分别采集x轴、y轴和z轴的电压值,然后通过AD转换,转换成数字信号,最后通过I2C总线传送到控制芯片,但此时得到的值并不是实际的角度和角速度值,还必须经过一定的比例关系进行转换,才能得到实际的角度和角速度值[4]。
2.2.4 智能手柄遥控
通过给舵机控制安装PS手柄接收器,通过控制PS手柄的两组摇杆而实现对蜘蛛多个动作组执行和切换的智能无线控制环节。
2.3 数据采集系统
2.3.1 温湿度采集
DHT11数字式温湿度传感器的内部结构包括一个电阻式感湿元件和一个NTC测温元件,并与一个高性能的单片机相连接。因此该传感器具有响应快、抗干扰能力强、性价比高等优点。每个DHT11传感器都在极为精确的湿度校验室中进行校准。校准系数以程序的形式储存在OTP内存中,传感器内部在检测信号的处理过程中要调用这些校准系数[5]。
通过给STM32F429控制板安装外置温湿度传感器,从而通过AD转换环节实现对温湿度的采样、量化、编码,最终通过电容屏显示;且程序中设有温湿度上下限,通过软件部分的循环扫描比较函数从而实现温湿度检测的自动报警环节和LED灯指示环节。
2.3.2 图像采集
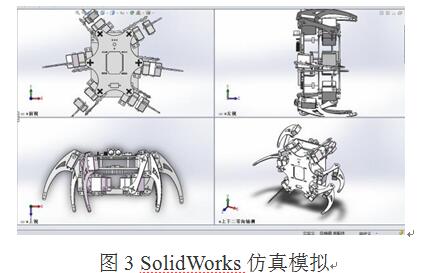
图像传感器是一款型号为OV5640的CMOS类型数字图像传感器。该传感器支持输出最大为500万像素的图像(2592×1944分辨率),支持使用VGA时序输出图像数据,输出图像的数据格式支持YUV(422/420)。STM32F4系列的控制器包含了DCMI数字摄像头接口(Digital camera Interface),它支持使用VGA的时序获取图像数据流。SolidWorks仿真模拟如图4所示。
3 实际作品
本文对基于STM32F429的蜘蛛六足机器人的实现方案进行了详细阐述,针对工业巡检场景增加了大量功能。
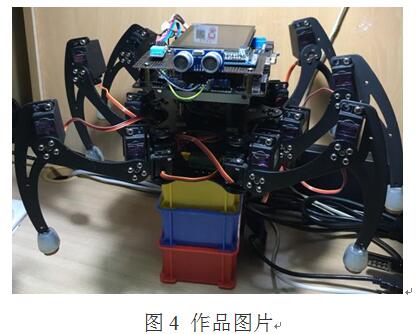
实际作品实现中,首先对基于舵机控制板的18路舵机运动系统进行调试,保证机器人的正常运动。然后对传感器部分进行调试组合,保证传感器反馈数据的正确有效性。最后进行整体整合,使反馈系统和运动系统形成一个完整有效的闭环链条。并且在此过程中,使用SolidWorks软件进行仿真模拟,易于我们对机器人的进一步优化。
最终完成以下作品一台。实物作品图片如图4所示。
参考文献
[1] 李珺. 多足机器人步态规划及自适应控制研究[D]. 东北大学,2011.
[2] 漆向军,陈霖,刘明丹. 控制六足仿生机器人三角步态的研究[J]. 计算机仿真,2007(04):158-161.
[3] 刘荣辉,彭世国,刘国英. 基于智能家居控制的嵌入式语音识别系统[J]. 广东工业大学学报,2014,31(02):49-53.
[4] 赖义汉,王凯. 基于MPU6050的双轮平衡车控制系统设计[J]. 河南工程学院学报(自然科学版),2014,26(01):53-57.
[5] 韩丹翱,王菲. DHT11数字式温湿度传感器的应用性研究[J]. 电子设计工程,2013,21(13):83-85+88.
作者简介
王伟奇 (1995-)男 本科 研究方向:电子信息科学与技术
作者
王伟奇 1995年12月28日 江苏科技大学 电子信息学院 电子信息科学与技术专业 



共0条 [查看全部] 网友评论