



1 引言
电机及其控制系统是发展机器人的核心领域,机器人的性能大多取决于伺服电机的性能。近年来,国内外学者对永磁同步电机伺服控制系统的研究越来越多,其中滑模变结构控制方案深受国内外专家学者关注。
文献[1]提出一种积分型滑模变结构控制器,在深刻研究龙伯格线性观测器原理的基础上,设计了一种负载转矩观测器,一定程度缓解了负载扰动的问题,提高了永磁同步电机的控制精度。文献[2]提出了一种互补滑模变结构控制方法,建立了直线伺服电机控制系统模型,将互补滑模面与广义滑模面相结合,设计了互补滑模变结构控制器。文献[3]将指数趋近律法用于滑模变结构控制器,得出滑模控制器的增量表达式及位置表达式。文献[4]提出了一种新型指数趋近律,通过将系统状态量的变化与驱进速度相关联,将常规指数趋近律进一步优化,有效缓解了滑模的固有抖振问题。文献[5]在研究永磁同步电动机的非线性动态数学模型的基础上,有效结合了精确线性化理论及滑模变结构控制方法,设计了同时具有转速环和电流环的一体化控制器。文献[6]为解决传统直接转矩控制中转矩脉动时出现高频噪声、转矩及磁链脉动大和逆变器开关不恒定的问题,在永磁同步电机直接转矩控制中加入一种新型变指数趋近律滑模变结构控制策略,有效增强了系统的控制性能。文献[7]在永磁同步电机直接转矩控制中加入滑模变结构控制策略,用转矩滑模控制器和磁链滑模控制器代替传统直接转矩控制中的两个滞环调节器,其输出保证了逆变器开关频率恒定,有效实现了空间电压矢量调制。文献[8]提出了反步控制与滑模变结构方法相结合的控制策略,增强了控制器的快速响应性和对外界扰动的抑制能力。
为提升机器人永磁同步电机控制系统的性能,本文提出了机器人永磁交流伺服电机滑模变结构控制研究。先在永磁同步电机数学模型的基础上提出了积分滑模面。然后针对滑模控制中高频抖振的问题选取了合适的控制律,最后为了得到控制律中的未知量负载转矩设计了负载观测器。仿真结果表明提出的基于滑模变结构的永磁同步电机控制策略控制精度高,运行性能好。
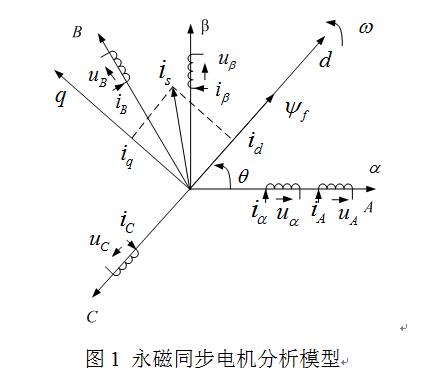
2 永磁同步电机数学模型
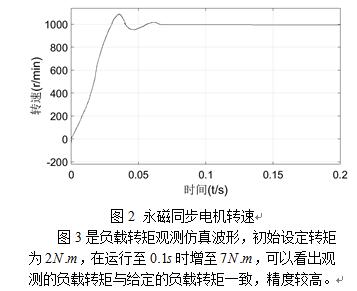
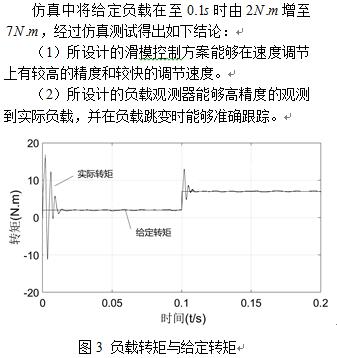
根据永磁同步电机工作原理,可得如图1所示的永磁同步电机分析模型,其中 轴为实际转子位置, 为实际转子位置角。
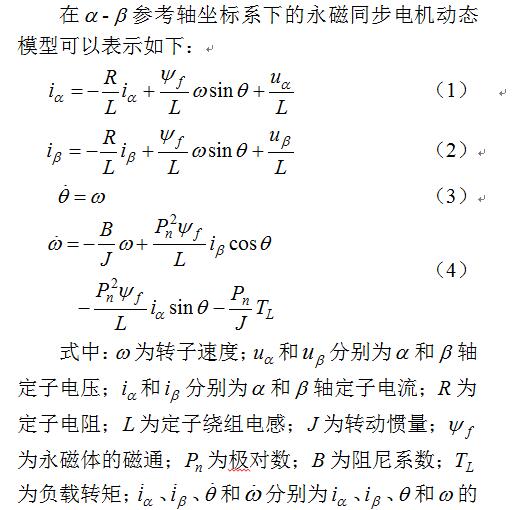
在 参考轴坐标系下的永磁同步电机动态模型可以表示如下:



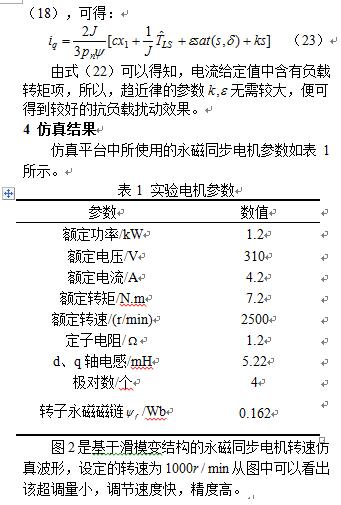
5 结论
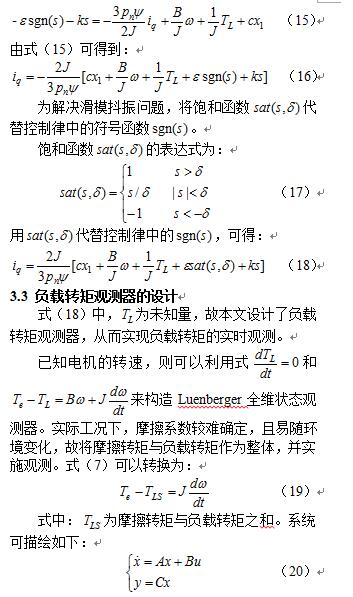
为提升机器人永磁同步电机控制系统的性能,本文提出了机器人永磁交流伺服电机滑模变结构控制研究,首先在永磁同步电机数学模型的基础上提出了积分滑模面。然后针对滑模控制中高频抖振的问题选取了合适的控制律。最后为了得到控制律中的未知量负载转矩设计了负载观测器,考虑到工业机器人的工作环境复杂,负载处于多变状态。
参考文献
[1]李政,胡广大,崔家瑞,刘广一. 永磁同步电机调速系统的积分型滑模变结构控制[J]. 中国电机工程学报,2014,34(03):431-437..
[2]赵希梅,赵久威. 永磁直线同步电机的互补滑模变结构控制[J]. 中国电机工程学报,2015,35(10):2552-2557.
[3]崔茂振,张昌凡,朱剑. 永磁同步电机滑模调速控制及其实现[J]. 电子测量与仪器学报,2012,26(01):84-92.
[4]张晓光,赵克,孙力,安群涛. 永磁同步电机滑模变结构调速系统动态品质控制[J]. 中国电机工程学报,2011,31(15):47-52.
[5]张晓光,姜云蜂,赵克,安群涛,孙力. 高速永磁同步电机滑模变结构一体化解耦控制[J]. 电力自动化设备,2013,33(06):58-63.
[6]童克文,张兴,张昱,谢震,曹仁贤. 基于新型趋近律的永磁同步电动机滑模变结构控制[J]. 中国电机工程学报,2008(21):102-106.
[7]贾洪平,孙丹,贺益康. 基于滑模变结构的永磁同步电机直接转矩控制[J]. 中国电机工程学报,2006(20):134-138.
[8]王礼鹏,张化光,刘秀翀,侯利民. 基于扩张状态观测器的SPMSM调速系统的滑模变结构反步控制[J]. 控制与决策,2011,26(04):553-557.






共0条 [查看全部] 网友评论