



关键字:桃树果园环境;智能采摘机器人;机构设计
1 引言
我国是世界第一大水果生产国,也是世界第一大水果消费国。水果种植业迅速发展,果园采摘问题日益突显。采摘作业所用劳动力占整个生产过程所用劳动力的1/3~1/2,而我国的水果采摘绝大部分还是以人工采摘为主。面对采摘作业的复杂性,强季节性,人工采摘效率低,劳动量大,如果人手不够不能及时采摘还会导致经济上的损失。采用传统机械式采摘,灵活性不高,存在局限性,果实损伤率较高,也不适用于采摘易损伤、要求完好率高的鲜食用水果和贮藏用水果[2]。采摘作业智能化成为采摘市场的发展主题。然而,现阶段各国智能采摘机器人产品都还处于实验阶段,并未真正的进入果园采摘市场。人们迫切需要一款智能化的机器来代替传统的劳动力作业,智能采摘机器人的研究符合当今果园采摘作业的需求。
2 桃树果园环境的分析
湖北省襄阳市枣阳市平林镇四井岗的桃树果园中,地面被平行地划分成很多块,每隔2.00m~3.00m都会被挖出一条沟用来排水,有许多纵行,桃树就被整齐地种植在这些纵行上在,桃树的间距3.00m~4.00m。桃树的平均高度1.80m~2.00m,为了让桃树利于结果,园主都会用石头压树枝,让树枝往四周延伸,而不是垂直上伸,桃树树型呈倒V状。桃园地势,整体多以平地为主,少部分有一定的坡度。在平缓的土地上分布的都是一些较蓬松的黑土土质,有一定坡度的地方表面会有一些麻秆石,土质多以黄土为主。
3 桃树果园智能采摘机器人的功能分析
桃子属于季节性果实,每年五月份上市,时间越往后价格越低,所以前期采摘效率越高越好,农户的收入也就越高。果实成熟期间,大小不一的果实悬挂在桃树上,园主根据商家要求的尺寸采摘相应大小的果实。智能采摘机器人采用以DSP为控制核心的嵌入式图像识别系统和WSN定位技术,行走在桃树下,准确判断果实的成熟度,精准定位果实的位置,采摘符合要求的果实[3-4]。桃子属于易损型果实,采摘时要保证采摘质量,“棒球手套”式机械手,皮革软质材质,整体包裹果实,让果实均匀受力,防止局部受力过大损伤果实。最后,采用真空吸取装置完成采摘。
果园里,地势平坦,桃树一列一列的整齐种植,每列桃树旁边都有一条水沟,用于排水,所以机器人的腿部与脚部设计需能适应凹凸起伏的路面状况,还需防止在果实成熟期间多雨性季节里陷入泥土过深无法保证机器人的正常作业。智能采摘机器人采用仿“蜘蛛腿”式行走系统,适应各种复杂的地形环境;脚掌仿照‘鸭掌’,以增大底部受力面积,防止陷入泥土,保证机器人的正常作业。
4 桃树果园智能采摘机器人机构设计
4.1 智能识别和定位
智能采摘机器人的智能识别和精准定位,以DSP为控制核心的嵌入式图像识别系统,通过CCD相机采集得到的图像直接使用DSP进行图像处理,然后传送给PC机进行特征和颜色的识别,从而判断出果实的位置和成熟度。为了更精确地进行导航和定位,采用WSN定位技术,通过RSSI计算出路径,达到自主定位及导航设计的效果。
4.2 “棒球手套”式机械采摘手[1]
“棒球手套”式机械采摘手,皮革软质材质。棒球手套式采摘手开口大,可以采摘不同尺寸的果实,灵活性强;皮革材质耐磨损,可以适应果园恶劣多枝的环境,同时缓冲采摘手在采摘过程中对果实施加的压力,保护果实。
4.3 真空吸取装置
采摘手手心处设置了真空吸取装置。采摘手包裹目标时,真空装置会抽干果实周围的空气,借助周围空气的压力使果实吸附在采摘手套中,对果实的梗部施加拉力,完成果实采摘。
4.4 360°三维旋转采摘和前臂伸缩装置
果园智能采摘机器人的采摘手臂的肩,肘,腕设置了360°三维旋转机械运动。前臂内部带有伸缩装置,可以适度延伸,应对不同方位的采摘命令,完成多种采摘路径命令,大大提高采摘效率和采摘的范围。
4.5 仿生“蜘蛛腿“式行走系统[5-6]
参照蜘蛛行走,设计了仿生“蜘蛛腿“式行走系统,整体以盘旋式六腿为核心,每只腿都有一定的比例高度,以满足于各种复杂的地形环境。同时,为了适用果实成熟期间的不同的地面环境,脚掌仿生“鸭掌”,增大底部受力面积,防止深陷,保证机器人的正常作业。
4.6 智能采摘机器人造型
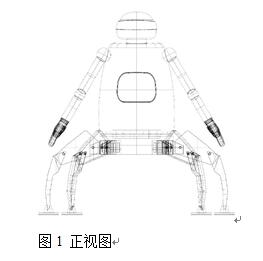
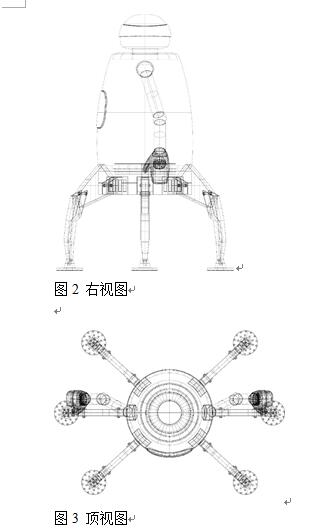
智能采摘机器人造型从上至下由三大部分组成。头部整体呈上下扁平,中间鼓的球状,中间带状区为CCD相机图像采集区,采集的图像可直接使用DSP进行图像处理,然后传送给PC机进行特征和颜色的识别。身体呈圆台状,正面的圆角矩形区为指令输入显示器,对机器人进行指令输入,功能设置等操作。俩侧的手臂呈左右对称式分布,由球形旋转关节与身体连接,每只手臂有3个活动关节。下部与身体连接为嵌入式,可实现360度旋转操作。下部为“六腿“行走系统,呈左右对称式分布。每只腿有2个活动关节,腿的末端为圆盘状脚掌,脚掌底部带有均匀分布的小圆柱,可增大摩擦力,防摔倒。
智能采摘机器人正视图如图1所示,右视图如图2所示,顶视图如图3所示。
5 小结
智能采摘机器人研究过程中,我们以桃园为研究对象,对桃园环境进行了调研,熟悉了桃子成熟时,从果树到市场的整个流程。桃园智能采摘机器人,符合采摘市场的需求,果农需要前期高效率的采摘作业去抢占水果市场的先机。智能采摘机器人可以很好的适应果园多变的环境,突破天气季节等环境的限制,工作时间长,采摘效率高,采摘质量好,从根本上解决采摘作业存在的弊端。不可否认的是,我们的采摘机器人依然存在不足,无法进行批量生产,进入采摘市场。我们的研究仅限于本科学历,对于具体的机械结构认知有限,当今技术的支持也比较局限。希望,我们的此次研究可以为后来果园采摘机器人的研究贡献我们的智慧。智能采摘机器人符合当今硬质果实采摘作业的需求,市场潜力大。
参考文献
[1]冯鲜,杨天华. 五自由度水蜜桃采摘机器人的结构设计[J]. 机电一体化,2017,9(6):42-47.
[2]蓝峰,苏子昊,黎子明,谢舒. 果园采摘机械的现状及发展趋势[J]. 农机化研究,2010,11(4):249-252.
[3]熊琼. 果蔬采摘机器人自主定位与导航设计-基于RFID和WSN信息融合[J]. 农机化研究,2017,10(5):223-227.
[4]吴义满. 基于DSP的移动采摘机器人目标识别视觉系统设计[J]. 农机化研究,2018,10(14):243-256.
[5]赵志伟, 可自主跨越障碍物弹跳式采摘机器人设计-基于跨栏跑摆腿技术动作分析[J]. 农机化研究,2018,10(5)86-90.
[6]龙也,谢博文,王小钊. 一种具有普适性的机器人行走任意轨迹跟踪算法[J]. 科协论坛,2010,3下(2):89-90.
作者简介
李文浩 (1999-) 女,本科 研究方向:工业设计






共0条 [查看全部] 网友评论