



关键字:智能小车;单片机;无线供电
1 引言
无线供电技术随着气候变化、能源枯竭和环境保护的日趋严峻而不断发展,而电磁所具有的功率大、输电效率高的特点,各高校和研究机构先后投入该领域的研究和应用。但目前主要研究成果仍然集中在美国、日本、韩国等国家。我国的研究主要集中在实验和验证、应用推广领域。各高校也将无线供电作为课程设计和毕业设计引入到教学当中,并组件相关的兴趣小组。而循迹小车作为典型的机器人技术,应用领域越来越广泛,它是机器人学的一类,具有自动行驶、环境感知等功能,融合了计算机控制技术和电子技术,是一种集合计算机、传感器、信息传输、自动控制于一体的高新技术的综合体[1]。将无线输电技术和循迹结合起来,是实现扩大循迹小车应用功能的一个思路。
2 目的意义
随着经济的快速发展和社会的日益进步,道路的畅通性、交通的安全性、环境的污染、能源的损耗等问题越来越突出。专家学者们在分析城市交通事故频发的原因时,认为运输车辆、人员素质、管理法规和道路环境等多方面的问题是产生事故的主要原因,而车辆性能的提高即如何提高汽车的智能化是其中很重要的一个问题。专家们研究认为,智能运输系统的研究包括智能汽车在内的研究对国家的社会经济以及交通运输将产生巨大的影响,它的意义和价值在于:大量减少道路的交通堵塞,可使城市交通堵塞和拥挤造成的损失分别减少约25%至40%,可以较低汽车的油耗,无线充电技术的发展可以提高道路交通的安全性和减少环境污染,并且极大地提高了道路交通的运输的效率,对交通运输业繁荣发展起到积极地促进作用[1-2]。
现在,机械、电子信息、电气硬件不再明显划界,自动控制在工业领域中应用也越来越多。作为机械行业的主力产品——汽车,它与电子信息产业的融合发展速度也显著提高,智能汽车的研究逐渐深入、技术逐渐完善,将使汽车变更加“聪明”起来,电子装置占汽车装置的总比例逐步提高,从根本意义上改变传统汽车的信息采集、处理、交换、车辆控制、行车导航与定位等技术方案与体系结构,意味着汽车由原来传统的机械产品向更高级的机电一体化智能产品发展。驾驶员使用智能汽车不仅可以减轻驾驶的负担,交通安全性也得到提高,如果配合城市智能交通控制系统,实现合理分配交通流,甚至可以实现智能汽车的无人驾驶[3]。
3 具体方案
本项目内容分为硬件方面和软件方面,而系统硬件方面需要根据软件来选择,同时硬件的选择还需要性价比最佳。系统硬件方面需要核心控制模块、点击驱动模块、寻迹模块,而硬件的设计方法采用外围电路的合理设计方法。系统主程序、工程控制程序、外部中断程序等包含在系统软件设计中,程序可以使用模块化的设计方法,这样的程序结构清晰,而且会更加可读。通过此研究还需要系统硬件与软件的整体设计。
本项目设计了一个集传感器、单片机、信号处理、电机驱动等技术为一体的高新技术综合体。研究要求利用红外技术实现对智能小车进行遥控控制,包括小车前进、后退、左转、右转、加速、减速、原地掉头等功能。利用前置摄像头及时反馈小车前方的路面信息,并且将其通过上位机可以直接在用户终端,即手机或者电脑上显示出来,达到实时监控的目的,小车在前进的过程中,若遇到障碍物,可以通过超声波模块进行避障。小车以单片机为控制核心,通过单片机操控小车实现以上功能[4]。本实验虽是一个演示模型,但是体现了一定的科学性、智能化和实用性。
3.1 超声波模块
本设计采用HC-SR04超声波模块,实现避障功能,此模块测量距离达到3cm-400cm之间,精度可以到达3mm。此模块主要有超声波发射器、接收器和控制电路三个部分组成。
超声波模块如图1所示,VCC是电压输入引脚,输入电压为+5V;GND与单片机的地相连;TRIG是触发信号输入,与单片机I/O口连接;ECHO是回响信号输出,与单片机I/O口连接。

3.2 红外遥控系统
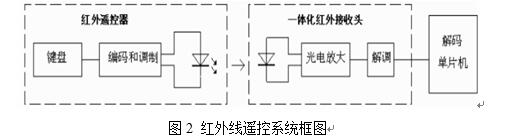
IR红外接收头,红外数据传输,通用红外遥控系统由发射和接收两大部分组成。应用编/解码专用集成电路芯片来进行控制操作,如图2所示。发射部分包括键盘矩阵、编码调制、LED红外发送器;接收部分包括光、电转换放大器、解调、解码电路。
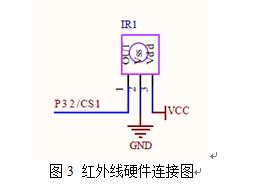
红外线模块主要包括反射性感应模块、对蛇形感应模块和热释电红外探测模块等。本项目应用的是反射型感应模块,是一种集红外线发射,接收功能与一体的集成组建。内部包含了红外线发射,接收及信号放大与处理,能够以非接触方式探测前方一定范围内的阻挡物,并转换成控制信号输出,如图3所示。
3.3 电机驱动
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使得步进电机在速度、位置等控制领域的控制操作非常简单。虽然步进电机应用广泛,但它并不像普通的直流和交流电机那样在常规状态下使用,它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。因此,用好步进电机也非易事,它涉及机械、电机、电子及计算机等许多专业知识。
本项目使用步进电机ULN2003达林顿管驱动。所用的四项五线步进电机如图4所示。图5为工业使用的普通步进电机。

3.4 开发板
本项目使用HC6800-ES V2.0单片机开发板,单片机采用STC90c516 1280 SRAM 64K Flash。
STC90C516系列单片机有高速、低功耗、超强抗干扰的优点,指令代码完全兼容传统8051,速度快8-12倍,12时钟周期课任意选择,内部集成MAX810专用复位电路,时钟频率在12MHz以下时,复位脚可直接接地。其电路图如图6所示。
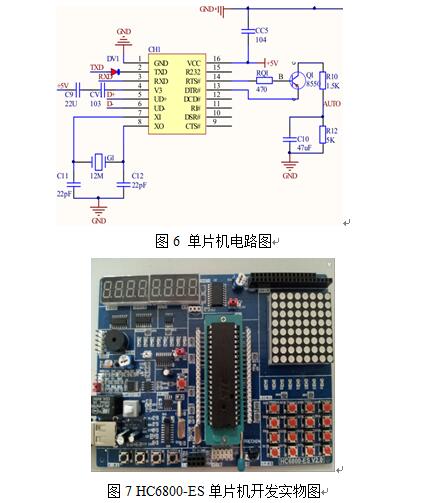
该开发板可以提供USB2.0和串口两种通信方式,USB实现供电、编程、仿真、通信多种功能,兼容STC系列单片机,容易上手,使用方便,实验用板如图7所示。
4 系统测试
根据系统设计方案,次系统测试可分为硬件测试、软件测试和软硬件联测三大部分。
4.1 硬件测试
由于此设计实物的焊接、装配工作量非常大,所以在电路安装完成后,首先应对系统进行整体检查,确认电路无虚焊、短路、断路等错误,然后应该对电路各功能模块进行分级测试,逐步实现系统的整体功能。
4.2 软件测试
此系统的软件程序,均使用C语言编写。首先选用单片机开发板作为程序测试的载体,逐步对各模块子程序进行测试,然后再将各子程序模块进行有机组合、联调,最终完成整个系统的软件测试。
4.3 软硬联测
系统软硬件联调的主要任务是检测系统中各模块的功能和效果,同时需要校正系统的相关数据,按实际测量数据进行调试,直至数据结果准确为止。
5 结束语
本设计方案按照任务要求设计了一个以51单片机为核心且基于智能车平台的非接触式充电装置,通过无线红外遥控来控制小车的启停、前进、后退、左转、右转、加减速、原地掉头、超声波避障等功能。摄像头寻迹,找到充电点,自动校准后,与电磁圈实现无线充电。
随着科技的快速发展,智能机器人已经能够解决无数人类无法解决的难题,智能小车作为智能机器人中必不可少的组成,发展更是迅速,将成为未来智能机器人发展热门趋势之一。智能小车的设计属于应用功能项目开发,本次设计由于我的知识和能力有限、时间仓促,功能上只是初见成效,整个设计还有很多不足之处有待完善和改进,仍有很大的发展空间,可以不断进行功能改进、完善,例如:增加温度、湿度的控制检测、植入语音芯片实验语音控制智能小车等多方面的功能,达到智能机器人的效果。
参考文献:
[1]陈懂.智能小车控制系统的及研究与实现[D].东南大学,2005.
[2]杨妍. Android遥控智能小车的设计与实现[D].江苏科技大学,2016.
[3]周华鹏.视觉导航中局部路径规划方法研究及嵌入式实现[D].南京航空航天大学,2009.
[4]王效华,牛思先.基于单片机PWM控制及时的实现[J].武汉理工大学学报,2010,(20):122-127.
作者简介
王一朵 (1997-) 本科 研究方向:通信与信息系统






共0条 [查看全部] 网友评论