



1 引言
电机及其控制系统是发展机器人的核心领域,机器人的性能大多取决于伺服电机的性能。近年来,国内外学者对永磁同步电机伺服控制系统的研究越来越多。当下永磁同步电机多传统磁场定向控制策略。但是其计算量庞大,因此国内外越来越多的学者将目光转向计算量较少的直接转矩控制策略上来。
文献[1]主要采用经典速度、电流双闭环来控制永磁同步电机,仿真结果显示运行效果良好。文献[2]分析了三自由度内模控制方法,并将该方法应用到永磁同步电机上,同时设计了反馈控制器、反馈滤波器和前馈控制器。文献[3]采用双闭环控制,其中速度环采用PI控制,电流环采用矢量控制,并且取得了不错的控制效果。文献[4]提出了一种基于占空比调制的模型预测直接转矩控制策略。该策略根据转矩的误差和定子磁链的误差得出当前电压矢量的占空比。文献[5]设计了基于最小二乘支持向量机优化的自抗扰控制器,并将它应用到永磁同步电机直接转矩控制策略中。文献[6]设计了ADRC速度调节器,并将最小二乘支持向量机最优回归模型嵌入到ADRC调节器中去,以提高ADRC观测精度及系统动态响应速度。
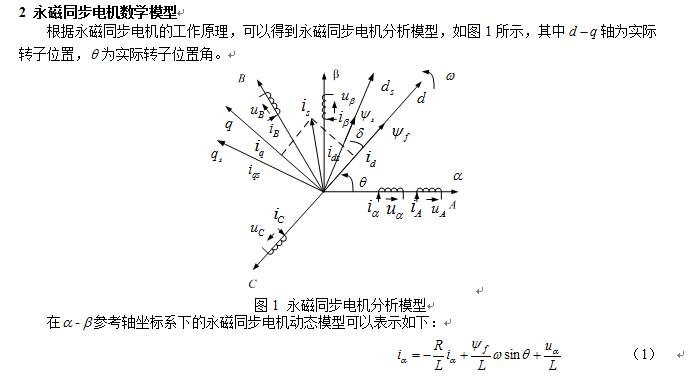
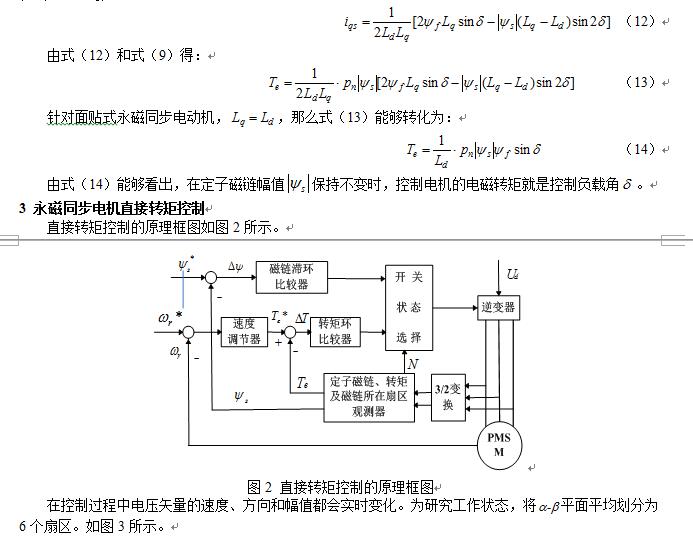
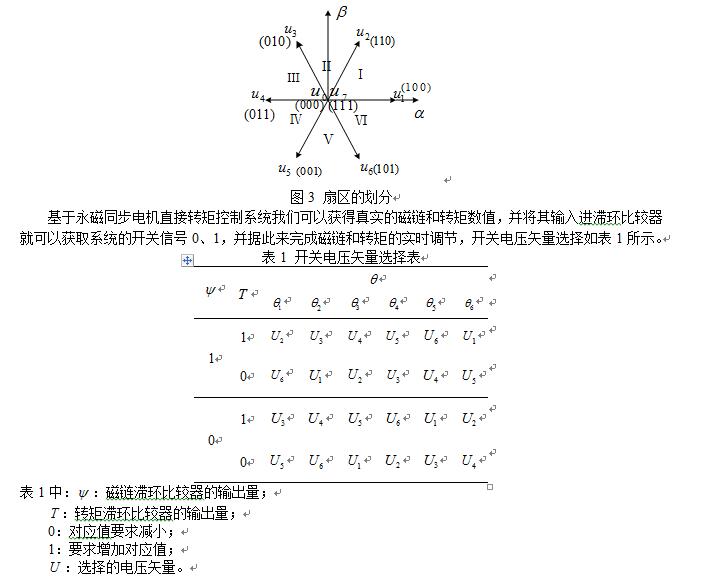
为提升机器人永磁同步电机控制系统的性能,减少控制过程中的计算量。本文介绍了永磁同步电机直接转矩控制策略。首先分析了永磁同步电机数学模型,并在 坐标系下给出了电磁转矩方程,然后设计了直接转矩控制系统,并给出了开关电压矢量控制表。最后搭建了永磁同步电机直接转矩控制仿真平台,仿真结果表明提出的永磁同步电机直接转矩策略响应速度快,控制精度高,运行性能好。
4 仿真结果
仿真平台中所使用的永磁同步电机参数如表2所示。
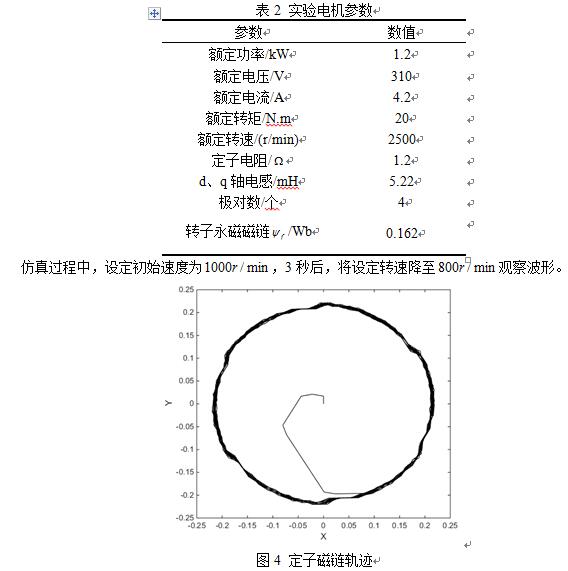
从图4定子磁链轨迹图能够明显看出,其运行轨迹近似于圆形,脉动较少。电机转速曲线如图5所示。
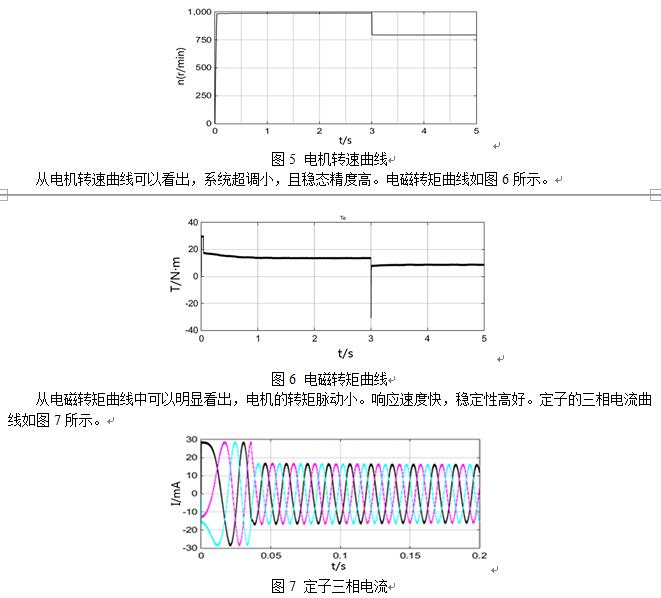
从定子的三相电流曲线中可以明显看出,定子三相电流的波形流畅,没有波动,控制效果良好。
5 结论
为提升机器人永磁同步电机控制系统的性能,减少控制过程中的计算量。本文介绍了永磁同步电机直接转矩控制策略。搭建了永磁同步电机直接转矩控制仿真平台,考虑到工业机器人的复杂工况,仿真中将设定转速在3秒后由 降至 ,从仿真结果中得出如下结论。
(1)定子磁链轨迹近似圆形,脉动较少,电机转速超调小,稳态精度高。
(2)电磁转矩稳定性好,转矩脉动小,三相电流曲线平滑,无明显波动,运行效果良好。
参考文献
[1]丁硕,崔总泽,巫庆辉,常晓恒,胡庆功.基于SVPWM的永磁同步电机矢量控制仿真研究[J].国外电子测量技术,2014,33(06):81-85.
[2]尹忠刚,张迪,蔡剑,杜超,钟彦儒.基于三自由度内模控制的永磁同步电机矢量控制方法[J].电工技术学报,2017,32(21):55-64.
[3]纪志成,周寰,李三东.基于PSIM永磁同步电机矢量控制系统的仿真建模[J].系统仿真学报,2004(05):898-901.
[4]牛峰,李奎,王尧.基于占空比调制的永磁同步电机直接转矩控制[J].电工技术学报,2014,29(11):20-29.
[5]刘英培,栗然,梁海平.基于最小二乘支持向量机优化自抗扰控制器的永磁同步电机直接转矩控制方法[J]. 中国电机工程学报,2014,34(27):4654-4664.
[7]刘英培,栗然.一种永磁同步电机直接转矩控制无传感器运行优化方法[J].中国电机工程学报,2014,34(30):5368-5377.






共0条 [查看全部] 网友评论