


关键词:自抗扰技术;直接转矩控制;仿真
1 引言
随着电力电子技术及控制理论的不断发展,交流异步电机的性能也在不断提高,异步电机的调速方法在实际中已得到广泛应用。在传统的异步电机直接转矩控制系统中,转速环通常采用PI控制器。但当被控对象时变性较强,且外在干扰因素较多时,传统PID控制已无法满足现代控制对于系统性能的苛刻要求[1]。
韩京清教授在发扬PID控制精髓的基础上,结合现代控制理论提出了自抗扰控制技术(ADRC),不但能处理好控制系统的快速性和超调的矛盾,还具有设计结构简单,不需要精确的数学模型,鲁棒性强,抗扰动能力强,能对内外扰动进行适时估计和补偿等优点[2]。本文在异步电机直接转矩控制中的转速环采用了自抗扰控制算法,解决了低速、扰动、电机参数变化时电机控制性能变差等问题。
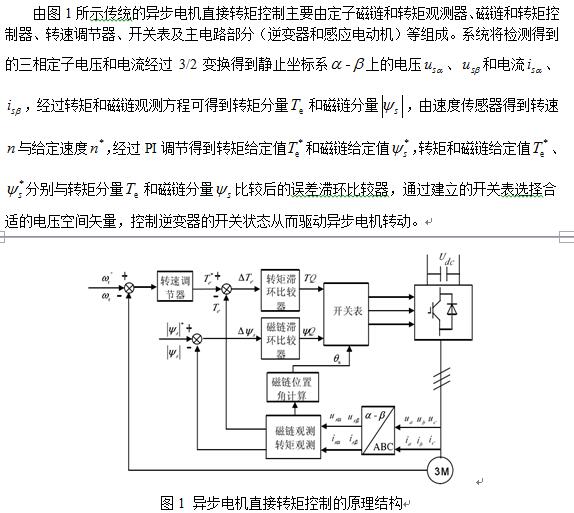
2 直接转矩控制
直接转矩控制作为高性能的交流传动控制策略,已获得各国学者的研究与改进,不断在性能上使其得到优化与提高。为更好的对比研究直接转矩控制系统,本文以传统直接转矩控制分析为基础,将逐步提出自己的研究改进策略。
3 自抗扰控制器原理
自抗扰控制器最大的优点就是对不确定的系统可以有效的控制,它由跟踪微分器(TD)、扩展状态观测器(ESO)、非线性组合(NLSEF)三部分组成,控制思想基于误差来消除误差,它是不完全依靠系统数学模型的控制律,这是由于扩展状态观测器能够实时估计并补偿系统在运行过程中受到的各种外部与内部扰动(负载扰动和电机本身参数时变扰动)的总和[3],控制结构如图2所示。
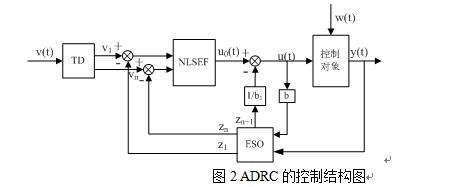
跟踪微分器(TD)是为系统输入安排过渡过程,得到光滑的输入信号以及输入信号的微分信号;扩张状态观测器(ESO)是实时跟踪系统状态,不仅能得到系统的状态信息,还能获得对象模型中内扰和外扰的实时作用量。非线性状态误差反馈律(NLSEF)是把跟踪微分器产生的跟踪信号和微分信号与扩张状态观测器得到的系统的状态估计通过非线性函数进行适当组合,作为被控对象的控制量[4]。
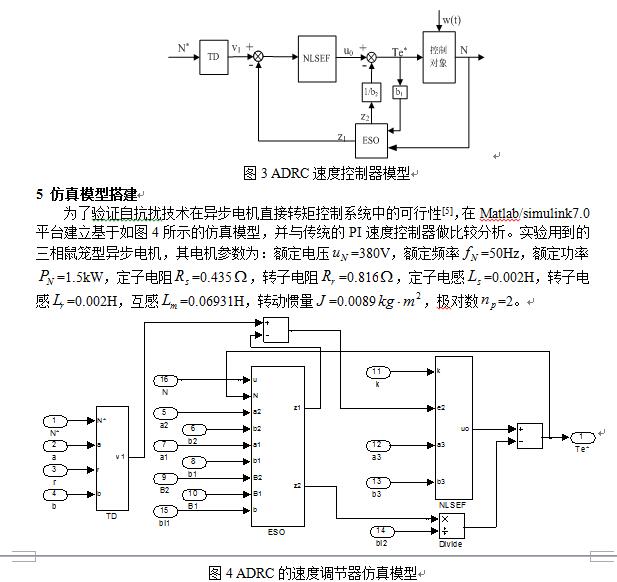
4 基于ADRC的速度控制器设计
提出了在异步电机转速环中采用自抗扰控制器(ADRC),此控制器不需要精确的模型结构和参数,可以对系统的内扰和外扰进行估计、补偿和控制。
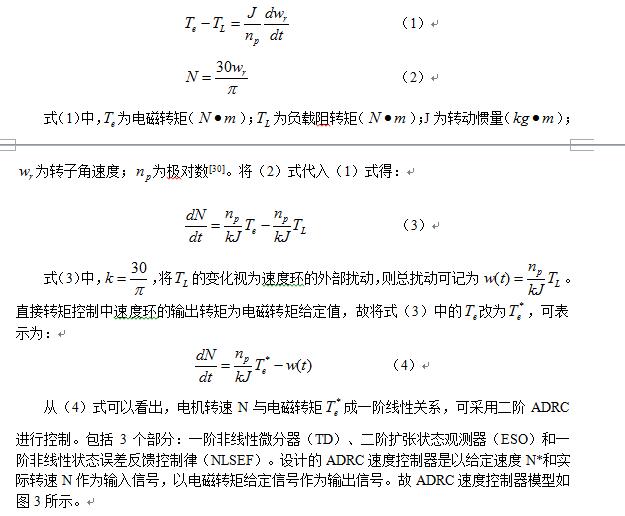
忽略电气传动系统传动机构中的阻尼转矩和扭转弹性转矩,系统的运动方程式为:
(1)转速为300r/min时的特性
图5所示为电机转速为300r/min时采用ADRC和PI速度控制器时的仿真对比图。
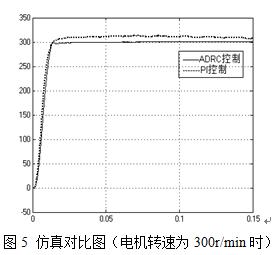
从图5中可以看出PI控制下,电机转速动态响应略微快一些,但是会有较大超调,稳态精度较低。而ADRC控制下,电机转速动态响应快且没有超调。由此可知ADRC速度控制器相对PI控制器在低速时具有较高的稳态精度。
(2)突加负载时的特性
图6为300r/min时,电机在0.1s时负载由0N•m阶跃到20N•m时的转速仿真对比图。
从图6可看出,在PI控制下0.1s突加负载时,电机转速下降较大,且转速恢复到给定转速的时间长。而ADRC控制下,由于ESO的补偿作用,电机转速下降较小,且速度恢复时间较短。故ADRC速度控制器相对PI控制器在低速时具有较高的自调节能力和抗干扰能力。

6 总结
本文通过用Matlab的仿真得到相对于PI控制,ADRC控制对在电机低速时具有更高的稳态精度、对负载扰动具有较好的调节能力和抗干扰性能。证明自抗扰控制器用于异步电机直接转矩控制系统可以准确的对系统模型的扰动进行估计、补偿、控制,提高系统的响应速度;同时由于有非线性组合,有效的解决了响应快速性与超调量之间的矛盾。
参考文献
[1]林新涵. 异步电机直接转矩控制系统的研究[D]. 浙江理工大学,2014
[2]段小丽,高新. 自抗扰应用于异步电机直接转矩控制系统[J]. 电气技术,2014
[3]冯治娇. 基于SVPWM异步电动机直接转矩控制系统的研究[D]. 西安科技大学,2013
[4]贾亚飞. 自抗扰控制器研究及其应用[D]. 燕山大学,2013
[5]洪乃刚. 电力电子/电机控制系统的建模和仿真(第二版)[M]. 北京:机械工业出版社,2010:202-204
作者简介
关云鹏(1993-)男 大连交通大学 硕士研究生 研究方向:电机与传动控制




共0条 [查看全部] 网友评论