


关键字:RoboCup;模糊综合评判;层次分析法;阵型选择
1 引言
RoboCup机器人世界杯是为了衡量不同国家和地区各个高校及研究机构的机器人发展水平而举办的大型机器人赛事。RoboCup标准组是以NAO机器人为标准平台,在图像处理、全局定位、动作设计以及决策策略等算法层面进行竞技的组别,因此受到各界广泛关注。本文主要对机器人的阵型进行策略设计,即机器人在比赛中的攻防选择。
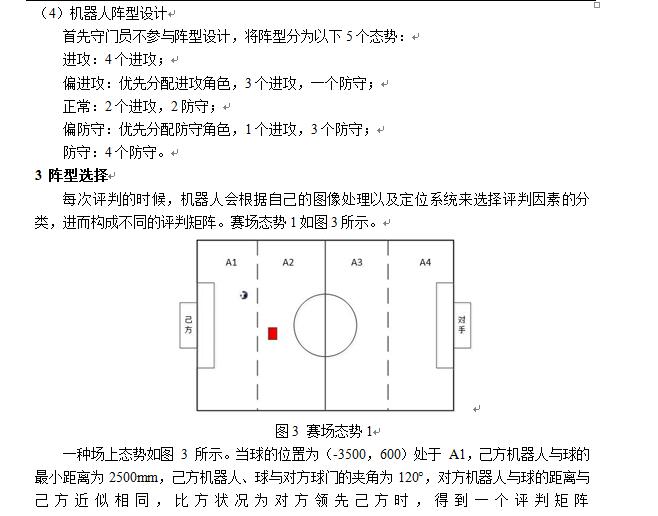
针对RoboCup标准组中的阵型选择有多种解决方案,比如BHuman团队(获得RoboCup标准组冠军6次)则是固定阵型,即设定好角色数目根据场上与球的距离直接更换角色,设定的角色为:1个前锋,1个助攻,2个后卫,1个守门员。这种方法固定了阵型但当有些机器人离场时可能力不从心;有的团队基于比赛场地的阵型设计,该方法根据比赛经验结合比赛场地地图,每一只机器人负责某一固定区域的进攻或者防守,该方法简单易实现但不够灵活;有的基于对方机器人位置与运动路线修改阵型的方法,需要快速准确的图像识别、精确的定位信息以及智能交互,需要调用的模块较多并且容易发生机器人之间的碰撞冲突。
本文针对RoboCup标准组比赛阵型选择为非线性的特点,以及BHuman等团队方法对于机器人离场角色缺失的问题,采用模糊综合评判方法,对阵型的选择和转换进行了分析和设计。
2 阵型设计
2.1 模糊综合评判
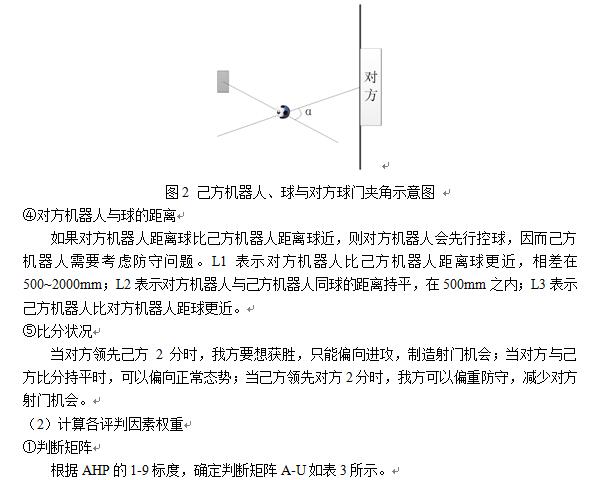
要客观评判一个事件,首先应对这个对象的影响因素给出评判,然后进行综合。例如对于机器人阵型,则应先对“球的位置”、“机器人和球与球门的角度”、“比分状况”等进行评判,然后综合评判。
(1)评判因素
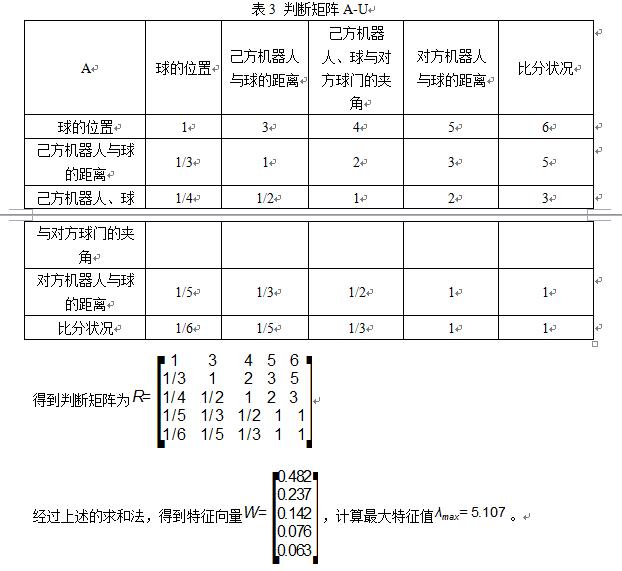
2.2 层次分析法(AHP)计算权重
层次分析法是从定性分析到定量分析的一种经典的系统工程方法,它将影响复杂系统的各种因素层次化,将人对因素之间重要性的主观判断为主的定性分析定量化,通过较为简单的计算将因素之间的重要性进行排序从而将各种复杂系统因素之间的差异数值化。由层次分析法确定的因素权重比直接给出的因素权重更加客观、更加准确[5]。
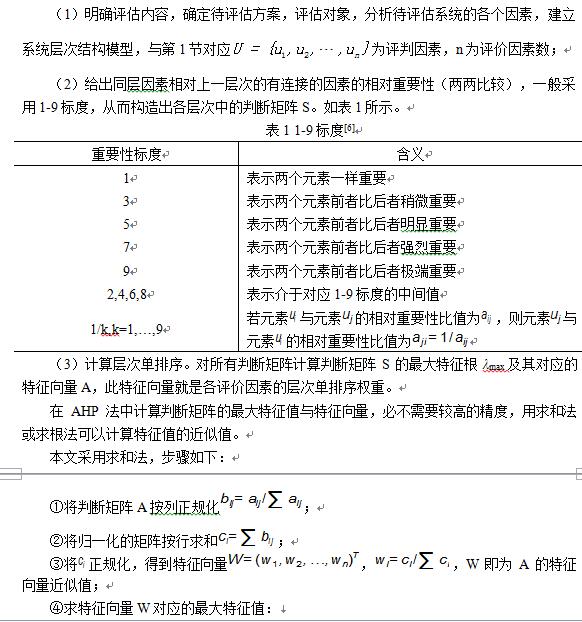
层次分析法的步骤如下[6]:

4 结论
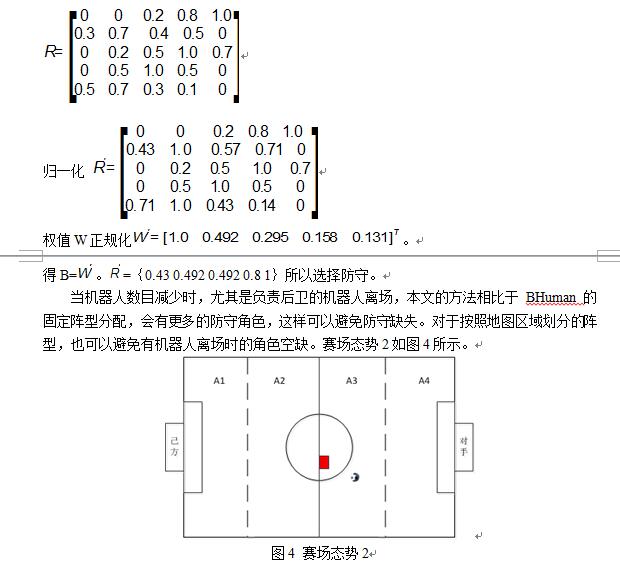
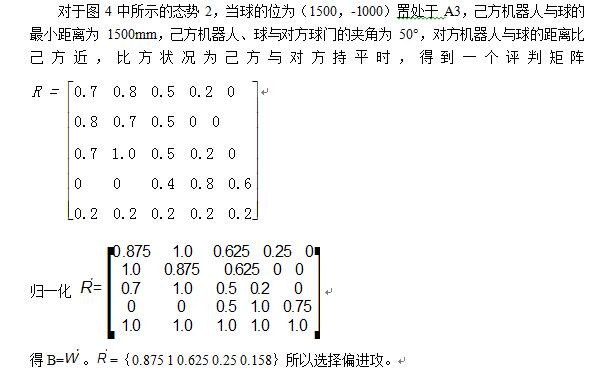
RoboCup标准平台组赛场上态势多变,难以用精准的模型直接推算机器人选择,本文采用模糊综合评判理论与层次分析法相结合的方法,设计了Robocup标准组比赛的动态阵型的选择策略。综合考虑小球位置、角度、双方球员功防能力等因素,针对部分机器人离场的状况获得相应的阵型。模糊综合评判这一方法可以让机器人更全面考虑场上各种因素以应对赛场态势,使阵型更加灵活方便。今后的工作便是通过不断地赛场实践评判因素的隶属度以及权重更加准确。
参考文献
[1]Walz N P, Burkhardt M, Eberhard P, et al. A comprehensive fuzzy uncertainty analysis of a controlled nonlinear system with unstable internal dynamics[J]. ASCE-ASME Journal of Risk and Uncertainty in Engineering Systems, Part B: Mechanical Engineering, 2015,1(4).
[2]徐名源. RoboCup标准组中仿人机器人的决策系统研究[D].吉林大学,2017.
[3]梁虎. RoboCup中型组机器人决策系统关键技术研究[D].长安大学,2011.
[4]彭祖赠,孙韫玉编著.模糊(Fuzzy)数学及其应用[M].武汉大学出版社,2007.09.
[5]杨纶标,高英仪,凌卫新,编著. 模糊数学原理及应用[M].广州:华南理工大学出版社,2011.07.
[6]符学葳.基于层次分析法的模糊综合评价研究和应用[D].哈尔滨工业大学,2011.
[7]Thomas R¨ofer, Tim Laue, Jonas Kuball, Andre Lu¨bken, Florian Maaß, Judith Mu¨ller, Lukas Post, Jesse Richter-Klug, Peter Schulz, Andreas Stolpmann, Alexander St¨owing, and Felix Thielke[J/OL]. B-Human team report and code release 2017, 2017. Only available online: http://www.b-human.de/downloads/publications/2017/coderelease2017.pdf.
基金项目
国家自然科学基金(No:51475047);
北京市自然科学基金B类重点课题(No:16JC0011)
作者简介
宋文苑 (1995-) 女 硕士研究生 研究方向:光电与视觉检测




共0条 [查看全部] 网友评论