



关键字:摄像头;SLAM算法;三维地图;路径规划
1 引言
随着科学技术的进步和社会发展,特别是受生活节奏的加快和工作压力的增大影响,人们希望更多地从繁琐的家庭日常清洁事务中解脱出来。这无疑是清洁机器人进入家庭的市场诉求。扫地机器人作为清洁机器人的一种,其针对的目标用户是所有家庭,其需求痛点恰恰是为了使人们从日常地板清洁工作中解放出来,它迎合了市场痛点的需求。最早的扫地机器人来源于伊莱克斯、戴森等领衔的吸尘器行业。
2 单目相机标定模型的建立
首先我们需要摄像机采集图像信息,建立针孔相机模型坐标系。图像坐标系如图1所示。
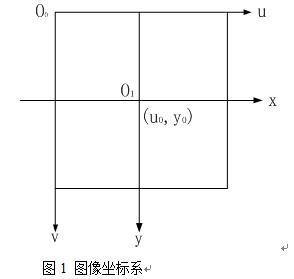
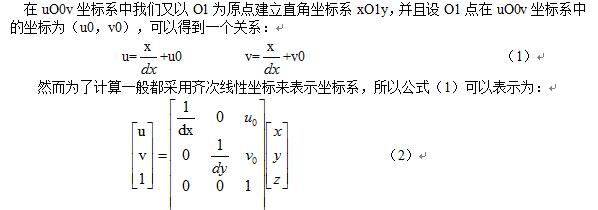
相机的模型需要建立实际环境中三维坐标点要与相机图像中对应的二维坐标点存在转换关系,建立如图2所示的三维坐标系。

在忽视图像成型过程中的一些破坏因素,只要相机的一些参数确定了,SLAM算法就能使用以上模型进行计算。
3 路径规划
路径规划是运动规划的主要内容之一,其实就是一些点或者是用来连接起点和终点的。
路径规划的一般步骤:①环境建模;②搜索路径;③路径的平滑程度。
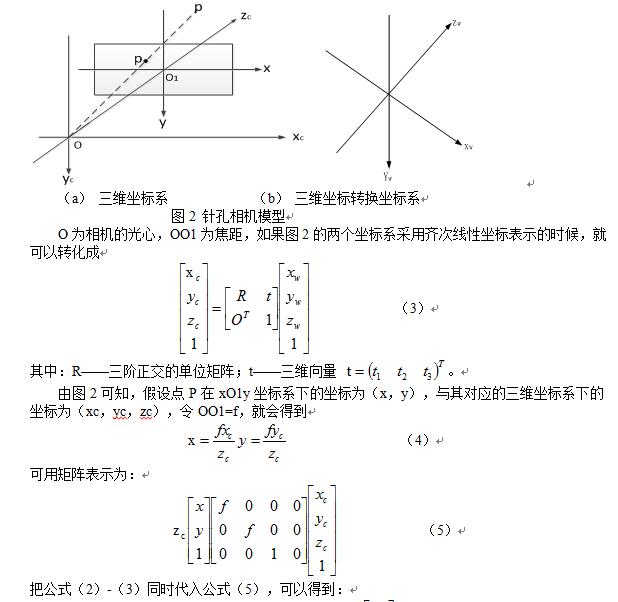
本文采用Grid的建模方法用编码的栅格来表示范围,有阻碍物的栅格称为障碍栅格。Grid一般采用环境建模的技术。扫地机器人的路径主要是通过octomap把LSD-SLAM获取的点转化成三维的空间网格,接着进行二位转化以此给机器人提供路径。
八叉树就是用来描述三维空间的树形结构,通过编写具体的代码可以实现。其基本原理就是八叉树就是在3D空间中,可以迅速地知道物体的位置,或检测到是否与其它物体发生碰撞在可以检测到的环境下。Grid模型如图3所示。
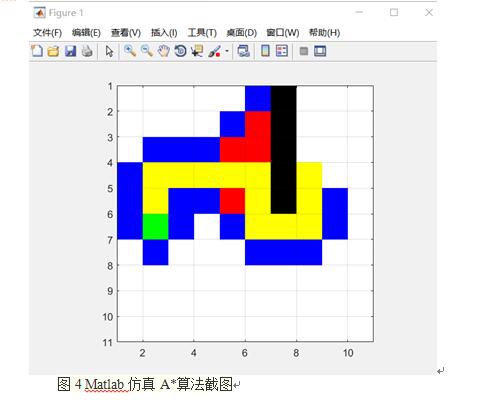
①特殊情况是当H(n)=0时,只有G(0)有效,A*算法就会成为Dijkstra算法,用来寻找最短路径。②当H(n)小于等于实际距离,那么A*算法就一定会找到最短路径。③当H(n)等于实际距离,此时A*算法就能不断进行路径探索,这样算法进行的就会很快。
Matlab仿真A*算法截图如图4所示。
4 扫地机器人的系统组成和功能
小米扫地机器人实物如图5所示。扫地机器人的组成模块如图6所示。
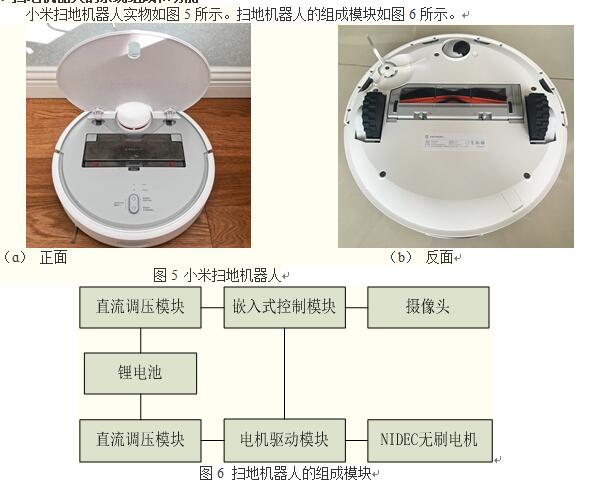
米家扫地机器人采用NIDEC无刷电机,具备1800Pa风压。浮动主刷设计,可以根据地面的高低上下浮动,紧贴地面。在清扫墙边缝隙的过程依靠沿墙传感器,米家扫地机器人和墙精确保持约1cm的距离,配合边刷的工作将墙边缝隙的灰尘清理干净。米家扫地机器人配备5200mA.h锂电池,续航2.5小时,充满电一次可清扫250平米。
①小米扫地机器人能够实现远程App操控,即使家里没人,也能轻松扫地;②实时清扫地图:可随时查看机器人位置及清扫路径;③清扫模式切换:安静、标准、强力三种模式,适合不同清扫场景;④预约清扫:每天/周末/工作日随心定时,自动工作。
5 结论
扫地机器人处在不断发展壮大的时期。为不断提升用户体验和拟合实际功能的需求,扫地机器人会不断进化和提升,将在融合型传感系统、功能定位、智能化程度、网络服务,以及多机协作和自我学习等方面不断发展,实现扫地机器人真正意义的智能化,使扫地机器人发展成为人们的家用高科技伙伴。通过对扫地机器人的研究是自己更深入的学习了一些路径规划的算法,以及如何通过Matlab对其路径实现仿真。扫地机器人已经走入了我们的生活,当然它的功能也会越来越强大,我们研究的过程也要不断进行,在对扫地机器人研究的过程中自己还有许多不足的地方,以后要多加强这一方面的学习。
参考文献
[1]权美香,朴松昊,李国.视觉SLAM综述[J].智能系统学报,2016(06).
[2]赵航,刘玉梅,卜春光,等.扫地机器人的发展现状及展望[J].信息与电脑(理论版),2016(12).
[3]张毅,杜凡宇,罗元,熊艳.一种融合激光和深度视觉传感器的SLAM地图创建方法[J].计算机应用研究,2016(10).
[4]梁文莉.竞争激烈的扫地机器人市场[J].机器人技术与应用,2015(02).
[5]王忠立,赵杰,蔡鹤皋.大规模环境下基于图优化SLAM的图构建方法[J].哈尔滨工业大学学报,2005(1).
[6]徐嵩,孙秀霞,刘树光,刘希,杨朋松.摄像机畸变标定的模型参考逼近方法[J].光学学报,2013(07).
[7]杜钊君,吴怀宇.基于激光测距与双目视觉信息融合的移动机器人SLAM研究[J].计算机测量与控制,2013(01).
[8]杜光勋,全权,蔡开元.视觉与惯性传感器融合的隐式卡尔曼滤波位置估计算法[J].控制理论与应用,2012(07).
[9]陈小龙,唐强,车军,刘林.基于人工视觉的四旋翼飞行器室内定位与控制[J].兵工自动化,2012(05).
[10]刘珂,王琦.数据采集系统抗干扰能力测试问题探讨[J].湖南电力,2005(05).
[11]刘珂,王琦.工业数据采集系统抗干扰能力测试中一些数据处理方法的探讨[J].中国科技信息,2005(15).
[12]赵航,刘玉梅,卜春光,等.扫地机器人的发展现状及展望[J].信息与电脑(理论版),2016(12).
[13]唐如龙.基于单片机的扫地机器人调速系统设计[J].装备制造技术,2017(07).
[14]林桂江.基于磁耦合谐振方式的扫地机器人无线充电系统设计[J].电子技术与软件工程,2016(01).
作者简介
马宏伟 (1993-) 男 研究方向:智能机器人






共0条 [查看全部] 网友评论