


关键字:工业机器人;示教;编程
1 前言
工业机器人是为应对工业领域升级改革而诞生的智能化产物,它是由多关节机械手组成的一种多自由度机械装置。它能自动遵循人的指示,满足人们的工作需要。机器人在全球工业领域具有举足轻重的地位。我国要实现智能制造2025,成为科技强国的道路上发展工业机器人是必经之路。工业机器人可依靠自己的动力装置和精确的控制能力来实现各种功能。人类可以通过示教器预编辑程序指令来制定动作路径,也可以进行现场指挥,自动完成一系列动作。
2 结构组成
工业机器人是一种拟人态的自动化装置,可以精确的控制物体运动的速度、位置。一般工业机器人可分为操作机、控制器和示教器这三种基本组成。系统组成如图1所示。
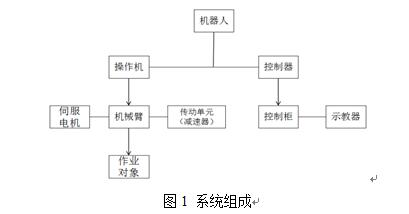
2.1 操作机
操作机即是机器人的本体,是工业机器人完成各种作业的执行机构,它主要是由六自由度关节机械臂、驱动装置、传动单元及传感器等部分组成,由于机器人需要其精确、快速而频繁的启停和运动,所以必须采用速度、位移、视觉传感器等检测元件来实现速度加速度的闭环控制。
(1)机械臂:一种可固定或可移动的机器装置,其结构可分为基座、腰部、臂部和手腕四部分,通常由许多机械连接杆连接在关节上组成类似于手臂的组合体。它是一种空间开链式结构,它仿真模拟人的手臂来捕捉或移动物体,并能实现自动控制和多自由度(轴)。操作方式主要是通过在空间直角坐标系中X、Y、Z轴上做直线运动达到目标位置。机械手末端执行器的最后一个轴机械接口通常连接到法兰上,以便于安装各种操作装置,如气爪、吸盘、焊枪和喷枪等。
(2)驱动装置:工业机器人驱动装置是使操作机运动的结构,驱动系统常用的驱动方式主要有液压驱动、气压驱动、电气驱动三种基本类型。相比于液压和气压驱动,电气驱动是大部分工业机器人所采用的驱动方式。驱动器大都是一个关节一个驱动器,且大多数都采用伺服电机作为动力源。
(3)传动单元:驱动装置的运动必须受控于传动单元,使其带动机械臂产生运动,以精确的保证末端执行器在要求的位置、姿态,目前广泛采用的传动单元是具有传动链短、体积小、功率大、质量轻、精确度高便于控制的特制减速器,部分位置也还采用了齿轮传动、皮带(链条)传动、直线运动单元等。主要两大减速器有:RV减速器和谐波减速器其主要区别是一般基座、腰部、大臂等重负载的位置(20kg以上的机器人关节)放置RV减速器;谐波减速器主要放在小臂、腕部或手部等轻负载的位置(20kg以下的机器关节)。
2.2 控制器
控制器是工业机器人系统中非常重要的部件,控制器是根据发出指令和传感器输出信号来控制机器人完成某些动作或操作的装置。它是评判机器人的功能和性能的重要点。控制器的基本功能包括:示教、记忆、坐标设置、位置伺服、与外围设备的连接、传感器接口和故障诊断安全保护功能。
(1)集中式控制器:利用微机可以实现对整个系统体系的全局控制,具有低成本、采集分析数据方便快捷、能实现系统的最优控制、具有良好的完整性和整体协调性等优点,基于PC机的系统硬件扩展更加方便。但缺点也较为突出:其控制缺乏灵活性,危险易集中出现,一旦出现故障危害性大、影响广;大量数据计算会降低系统的实时性,复杂的系统连线会降低系统可靠性。
(2)分布式控制器:主要思想是“分散控制、集中管理”可以进行总体目标任务进行全面协调和分配。整个系统在功能、逻辑和物理方面是分散存在的不存在相互干涉和同时运行。分布式控制器是一个实时、开放、精确稳定的控制系统。系统通常采用的是两级控制结构体系,由上位机和下位机构成。分布式控制的好处是系统的灵活性好,降低了风险;多处理器分散控制能并行执行,从而提高系统的处理效率,缩短了响应时间。
2.3 示教器
示教器主要由液晶显示屏和物理按建组成,它是人和机器的连接器,它可以编写、检测、保存和运作程序,设置、检查机器人的状态、姿态、位置等。示教-再现型机器人的基本操作都是通过示教器来完成的,实质就是一个机器人专用的智能终端。
3 示教编程
华数机器人作为中国工业机器人的龙头企业之一,也为中国的工业发展做出了贡献。下面是我们选取的华数2代机器人为例,来进行基础的示教编程。
3.1 华数机器人坐标系
机器人各轴方向如图2所示。

机器人在完成操作者所规定的运动轨迹时,是根据操作者所设定的每一个坐标系而进行移动的,所以要明确在运动中所要使用是何种坐标系,机器人有六个多自由度关节(A1-A6)如图2所示,每一个轴所旋转的方向和角度都不一致,所以在运动中就需要各个轴之间相互配合,在华数机器人控制系统中有下列几个坐标:
轴坐标系:针对于机器人单个轴(A1-A6)的运动坐标系,也可进行单独操作。
机器人默认坐标系:默认的坐标系为笛卡尔坐标系,固定于机器人底部,它可以根据世界坐标系说明机器人的位置。
世界坐标系:是机器人固定于底部的默认坐标系与基座标系的原点坐标系,在默认配置中,它是与默认坐标系一致的。
基座标系:用来说明工件所处在的一个位置,是机器人所相对于自己本身的坐标系,修改后机器人就按照设置的坐标系运动。
工具坐标系:它位于法兰盘的工作点中,其工具可安装夹具、吸盘、焊枪等,主要是机器人本体运动的一个参考坐标系。
3.2 华数工业机器人的编程
想让机器人根据操作者所规划的运动轨迹自动运行,除了设定添加坐标系还是不够的,还需要有程序的运行,目前最主流的编程方法都是从点位之间的运动轨迹和运动的方式进行编写的,运动轨迹有三种:点到点,点到线,点到圆弧这三个分别以三个运动指令表示:MOVE、MOVES、CIRCLE。
MOVE指令用于当选择一个目标点后,机器人可在起始位置与最终位置点之间任意运动,运动中其各个轴都会参与运动,无法准确的预计和控制各个关节的运动轨迹和运动姿态,易出现危险事故,所以应尽量少用此指令。如图3所示,当使用MOVE指令时先标定插入行的上一行,选择运动指令MOVE再选择机器人轴输入点位名称配置指令参数,再手动移动机器人末端执行器到所需位置,记录此时关节或笛卡尔坐标。

为了使机器人在运动完成后能精确的到达目标点,就必须给定一个运行速度,其运行速度可进行手动调节也可在程序中进行控制,在程序中需在指令参数中配置VTRAN参数,运动参数如附表所示。

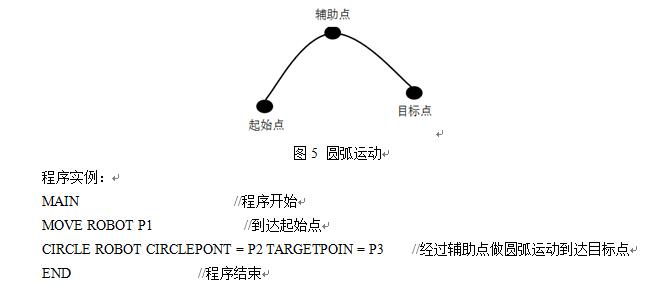
CIRCLE指令为画圆弧指令,机器人画圆弧采用的是任意三点画圆,机器人从当前位置点起选择一过渡点和目标点即可形成一段圆弧如图5所示。当选择圆弧指令后需点击CirclePoint输入框,移动机器人到所需过渡点的位置,再点击记录关节或笛卡尔坐标系,完成CirclePoint记录后再点击TargetPoint,随后以相同的方式进行记录,配置参数后CIRCLE添加完成,该移动方式也可进行精准定位。
当掌握了这三种运动轨迹后,机器人的所有运动都可以用这三种指令进行组合完成,但如果要编写一段能自动完成工作任务的完整程序就还需要有编程语法结合条件指令、流程指令、程序控制指令、延时指令、循环和IO指令等。当编写完程序之后我们就需要对程序进行检查,以免出现安全事故,当检查时我们人就应当站在机器人最大操作极限范围之外,运行程序时运行速度不宜过快,把运行方式调为单步运行,这样在保证安全的同时又方便于我们更好的查出程序的错误,当示教器信息窗口显示报警错误信息时,则表示此条程序错误无法运行需修改程序。
4 结束语
工业机器人的出现对于全球工业的发展起到了至关只要的作用,也带动了新的产业的发展。现在工业机器人也不单单是在工业领域站住了脚跟,更是在电子行业、物流方面等也起到了重要的作用。工业机器人是一个国家经济发展不可缺的一部份,国外的工业机器人技术日渐成熟,我们也应该跟住脚跟。甚至超越,争取早日实现我国的“中国制造2025”计划。未来的工业机器人应该更加的智能化、人性化,更加推动智能化产业的建设。总的来说,工业机器人的发展与投入是持续的、长期的,是需要不断突破的结果。我国现已是机器人市场最大的需求国,可想而知我国对于机器人产业发展的重要。也希望国产机器人在机器人的市场占有率中大幅提高。
参考文献
[1]兰虎.工业机器人技术及应用[Z].北京:机械工业出版社,2014.8.
[2]谭文君,董桂才,张斌儒.我国工业机器人行业的发展现状及启示[J].宏观经济管理,2018(04).
[3]段新燕.智能制造装备的发展现状与趋势[J].中外企业家,2017(08).
[4]黄培,孙亚婷.智能工厂的发展现状与成功之道[J].国内外机电一体化技术,2017(06).
作者简介
徐明 (1997-) 男 汉族 研究方向:工业机器人应用




共0条 [查看全部] 网友评论