


Abstract:In order to solve the problem of high voltage induction motor direct start for electric hydraulic excavator, a high voltage soft starter control scheme was proposed. Based on the structure and principle of the soft starter, the scheme adopted the fuzzy self-tuning PID control method to conduct the soft starter experiment for the large electric hydraulic excavator. The experiment results verify the correctness and effectiveness of the soft start control system, which can be applied to the high voltage motor start system in construction machinery field.
Key Words:Electric hydraulic excavator;Soft starter;High voltage induction motor;Fuzzy control
【中图分类号】TM343 【文献标识码】B 【文章编号】1561-0330(2018)09-0000-00
1 引言
近年来随着动力源的改进,采用电动机驱动液压系统的电动型液压挖掘机逐渐成为挖掘机领域中新的研究方向与热点。传统电动液压挖掘机常采用三相异步电机直接全压起动的控制方式,起动设备简单,但存在起动电流大,起动转矩冲击大,易造成电网冲击波动等缺点,即使采用串电抗或自耦变压器起动等降压措施,效果仍不理想[1]。而且,上述缺点会导致电动挖掘机在复杂电网环境下无法正常起动,电机轴负载连接装置易损,影响电网其它设备正常工作等问题,也不利于系统功率调节与效率提升。特别,采用大功率高压电机的矿用大型电动液压挖掘机的电机起动问题尤其突出。
本文介绍了一种适用于大功率电动液压挖掘机的高压电机软起动控制系统,软起动系统基于晶闸管三相交流调压电路设计,采用模糊自调节PID控制方案,可有效抑制电流与转矩冲击实现电动机软起动,且抗电网波动能力强,能有效延长电机及机械部件寿命。实验结果证明,该软起动控制系统完全可适用于电动挖掘机等工程机械的高压电机起动系统。
2 软起动器结构及原理
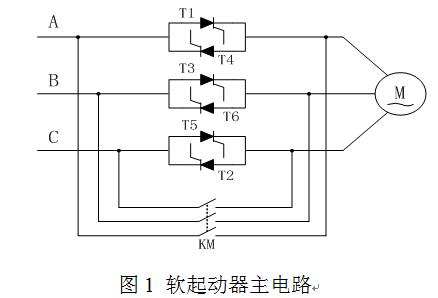
高压软起动器作为一种电机起动与保护装置,其主电路图如图1所示。电动机起动过程中,先利用微处理器对三组正反并联的晶闸管模块进行相角触发控制,使电动机输入端电压按照预设的曲线变化至额定值,直到电动机加速到全速运行;起动完成后,则控制旁路接触器接通,使电动机直连三相电源,从而实现平滑的软起动[2]。对于软停车功能,则过程与软起动相反,原理类似。
高压软起动器具体由以下部件组成:
(1)可控硅模块:每相中采用相同参数的可控硅串并联安装在一起。根据所使用电网的峰值电压要求,选择可控硅串联的数量不同。
(2)可控硅保护部件:主要包括由RC网络组成的过电压吸收网络、由均压单元组成的均压保护网络。
(3)光纤触发部件:采用强触发脉冲电路,保证触发的一致性和可靠性;利用光纤触发进行可靠地高低压隔离。
(4)真空开关部件:在起动完成后,三相真空旁路接触器自动吸合,电动机投入电网运行。
(5)信号采集与保护部件:通过电压互感器、电流互感器、避雷器、零序电流互感器对主回路电压、电流信号进行采集,由主控制器CPU实现相应的控制保护功能。
(6)系统控制与显示部件: 主控制器CPU作为控制核心,负责执行中心控制保护功能、提供人机交互功能,并显示系统电压、电流,故障信息、运行状态等信息。
3 软起动器控制方式
软起动器一般有多种起动方式,主要包括:限流软起动、电压斜坡起动、电流斜坡起动等;同时还有多种停车方式:自由停车、软停车方式、制动刹车等。用户可根据负载不同及具体使用条件选择不同的起动方式和停车方式[3]。
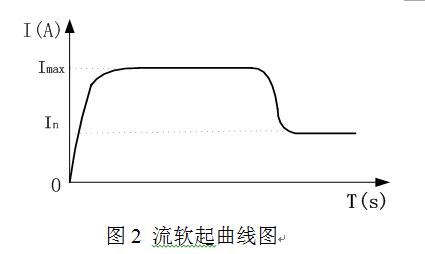
在大型电动液压挖掘机系统中,电动机驱动液压泵由空载起动,其最突出的问题就是起动电流过大,对电网产生严重冲击。限流软起动就是最直接的控制电流的起动方式,该方式的特点是限制了起动电流,同时也限制了起动转矩,故适用于液压泵类轻载起动的场合。在使用限流软起动方式时,软起动器得到起动指令后,其输出电压迅速增加,直至输出电流达到设定电流限幅值Imax,输出电流不再增大,电动机运转加速持续一段时间后电流开始下降,输出电压增加至全压输出,从而完成起动过程,如图2所示。但限流软起动常采用传统PID控制,与异步电机的非线性、强耦合的特点缺乏适应性。
4 软起动模糊自整定PID控制方案
PID控制即对系统偏差的比例(Proportional)、积分(Integral)、微分(Differential)调节控制。因其技术成熟,结构简单,应用方便等特点,在工业自动控制场合应用的十分广泛。但PID控制缺乏灵活性,过分依赖被控对象的数学模型,对于非线性、难以建立精确数学模型的异步电机
系统,很难满足实时控制的要求,无法达到理想的控制性能[4]。
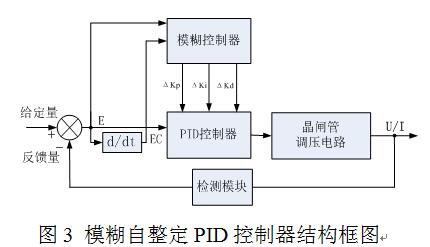
因此,本文引入模糊算法控制方法,如图3所示。模糊算法其本质上属于非线性控制,不依赖被控对象的精确数学模型的特点,具有很好的灵活性,对系统实时控制性能具有明显的改善作用[5]。通过将PID控制与模糊控制相结合,取长补短,在闭环控制中用模糊自整定PID进行调节,根据系统不同时刻的情况依据模糊推理在线自整定PID参数Kp、Ki、Kd,使得系统处于良好的控制状态下,以满足不同情况下对控制量的要求,从而使闭环系统具有良好的动、静态性能,提高电机软启动质量。
5 系统实验及结果分析
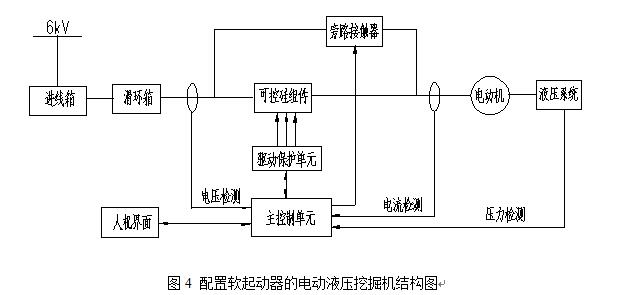
基于上述理论,将高压软起动方案应用于公司一款300吨级大型矿用电动液压挖掘机,整机系统主要包括进线箱、滑环箱、电动机、软起动器、主控制单元、人机界面、液压系统等,如图4所示。系统由外部6kV电网供电,电源电缆经挖掘机底盘后部的进线箱与中央回转体处的滑环箱连接,再经软起动器的可控硅组件与电动机连接,主控制单元分别与电压、电流及压力传感器件连接,并通过驱动保护单元与可控硅组件光纤通信连接,同时主控制器与人机界面采用CAN通讯连接实现整机控制,电动机通过分动箱与液压系统机械连接提供液压驱动力。其中,鼠笼异步电动机主要参数:额定电压6kV/50Hz;额定功率1250kW;额定电流145A;额定转速1488r/min。实验器材包括上位机、电压测试用差分探头(Tektronix P5200)、电流测试用罗氏线圈(Powertek CWT 30B)、DA信号显示用示波器(Agilent MSO6014A)、数字万用表等。
实验过程中,采用限流软起动控制方式,电动机在挖掘机空载状态下驱动液压泵软起动运行,实验波形如图5所示。
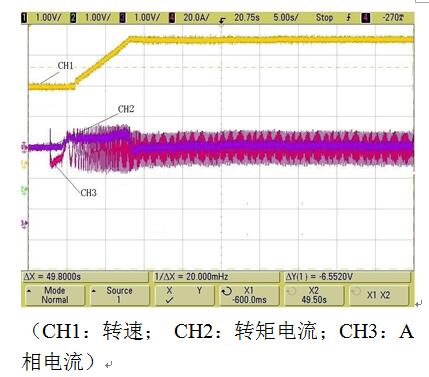
图5 电动机软起动实验波形图
由实验波形图可以看出,电动机在软起动过程中,软起动器输出电流随电压迅速增加,达到设定电流限幅值(2倍电机额定电流280A)时不再增加,同时电动机平滑加速运行约5s至额定转速1488r/min,最后旁路接触器切换至全压输出完成起动。实验证明,基于模糊自整定PID控制的限流软起动方式冲击电流小,转速平滑稳定,转矩震荡小,抗扰能力强,可实现良好的起动效果。
由实验波形图可以看出,电动机在软起动过程中,软起动器输出电流随电压迅速增加,达到设定电流限幅值(2倍电机额定电流280A)时不再增加,同时电动机平滑加速运行约5s至额定转速1488r/min,最后旁路接触器切换至全压输出完成起动。实验证明,基于模糊自整定PID控制的限流软起动方式冲击电流小,转速平滑稳定,转矩震荡小,抗扰能力强,可实现良好的起动效果。
6 结束语
本文在介绍软起动器原理及控制方式的基础上,采用软起动模糊自整定PID控制方案,并在大型电动液压挖掘机上对该软起动系统进行了实验研究。实验结果表明,该配置软起动器的电动液压挖掘机系统可以有效的控制电机起动电流,转速平滑稳定,并克服了转矩过冲现象,研究结果为工程机械高压电机领域的软起应用提供了参考依据。
参考文献:
[1] 刘利,王栋.电动机软启动器实用技术[M].北京:中国电力出版社,2010:23-58.
[2] 骆宝俊.异步电机软起动器研究[D].南京:南京理工大学,2007.
[3] 杜江.三相感应电动机软起动及节能运行技术的研究[D].天津:河北工业大学,2007.
[4] 王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003:40-63.
[5] 金立.自调整模糊PID策略的异步电机软启动器设计[J].煤矿机械,2011,32(7):11-14.
作者简介:
王峰 男 1983 研究生 电气工程师 供职于徐州徐工矿山机械有限公司 研究方向为大型挖掘机电气控制与电力传动




共0条 [查看全部] 网友评论