
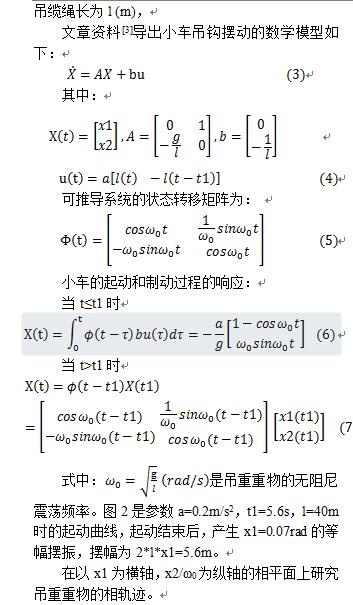
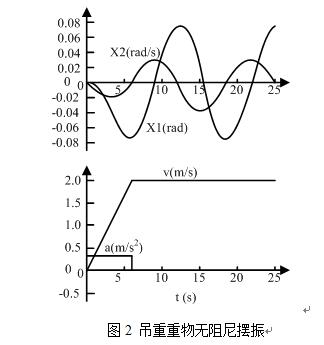
Abstract: This paper introduces the equivalent model of lifting weights of crane trolley. The calculation shows that The crane trolley will continue to do the amplitude swing after the trolley starts and the braking process ends. The control terminal and parameter setting requirements of the VACON converter lifting application macro APFIFF20 are pointed out. According to the characteristics of crane control, by modifying the frequency of the converter that controls the operation of the trolley, the oscillation is restricted continuously. APFIFF20 anti-sway control effect is obvious. High accuracy of positioning control. It has the characteristics of stable and reliable system.
Key words: Crane; Anti-swing control; Converter
【中图分类号】TP276【文献标识码】B 【文章编号】1561-0330(2018)09-0000-00
1 引言
工业起重机吊重重物会随着小车(或大车)的运行而摆动,只有非常有经验的操作人员才能在无起重机防摇摆系统的情况下控制重物在几乎无摆动情况下停止。由于无需等吊重重物停止摇摆,并且能够进行精确的定位,因此工业起重机的防摇摆系统可以明显的提高工作效率。
起重机连接吊重重物的钢丝绳是柔性的,大车或小车启动、制动时产生的加、减速度导致吊重重物摇摆晃动,不仅影响工作效率,而且极易造成危险。防摇控制具有现实意义。
2 桥式起重机系统简化与建模
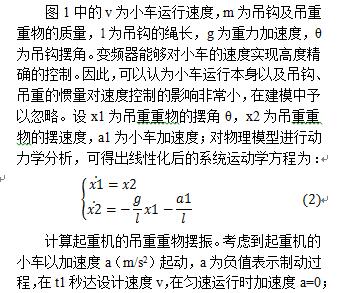
研究表明,起重机大小车的运动对吊重重物摆角的影响具有独立性[1],本文只讨论起重机吊重重物系统小车运行的的建模。
以小车运行为例,小车的速度v与变频器的输出频率f成正比,其关系为:
v=kf (1)
式(1)中:k为换算比例系数。
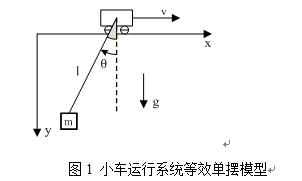
在起重机中,小车采用变频器控制,速度可以做到平滑调速,小车的物理模型可以简化为吊点在移动的单摆模型,并建立坐标系,各物理量方向如图1所示。

3 NXP变频器内置防摇控制
Danfoss公司的VACON NXP变频器具有VACON NC61131-3专业编程工具,是一个可以对应用程序进行图形化描述的模块化编程工具,在应用层软件对用户开放,编程工具支持多种基于IEC61131-3标准的编程语言,包括功能块图、结构化文本ST、控制流程图。编程工具内置了计时器、定时器、比较器、触发器和PID控制等函数模块。可以很方便完成控制算法,编程简单方便。在变频器应用层内置算法比外置控制器如PLC等具有抗干扰性强的特点,可以很容易获得变频器输入的模拟量、变频器输出的电压、频率、电流、转矩、加减速时间等变量,更容易完成变频器输出频率的控制。针对起重机防摇控制要求,编制了特殊的起重机应用控制程序APFIFF20。
防摇摆控制是利用钟摆原理,通过修改变频器的输出频率而连续限制摆动。通过设定绳长或者摆动时间,然后通过给定的加速度和减速度来抵消摆动。使吊重重物在达到设定的速度或者停机时,基本没有摆动。
VACON NXP变频器起重机应用控制程序APFIFF20控制接线如图5所示。
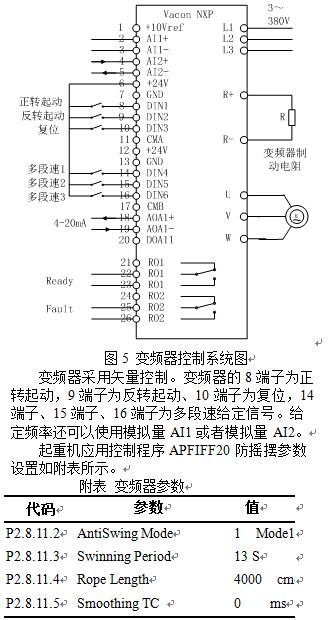
参数P2.8.11.2 防摇模式:
0=不适用此功能;
1=模式1 一般用途模式,用半绳长度稍微降低阻尼。
2=模式2 稍慢的模式,但对所有短于定义的绳长都有良好阻尼。
3=模式3 此模式几乎独立于绳子长度,但比有经验的操作员控制反应快。
参数P2.8.11.3 摇摆周期:以秒为单位摆动周期。如果输入摆动周期,变频器就不会使用绳子长度进行防摆动。
参数P2.8.11.4 吊钩绳长:绳子长度是厘米。如果摆动周期的时间被给定,则不使用此绳长参数。
参数P2.8.11.5 平滑时间:使用此参数可使频率参考更加平滑。
VACON变频器使起重机吊重重物摇摆的幅度减少90%以上。同时能精确定位控制,控制精度达3毫米。
VACON变频器起重机应用控制程序APFIFF20应用宏,在起重机应用中可大幅度地提高起重机使用的生产效率,提高起重机使用的安全性。
4 结论
VACON变频器起重机应用控制程序APFIFF20具有防摇摆功能,降低起重机货物损坏及人员受伤害的风险。使需要起重机设备的各种生产工艺过程实现高度自动化成为可能。同时减少了起重机的点动操作,延长起重机的使用寿命。提高起重机安全运行速度,从而进一步提高生产效率。变频系统使得起重机易于掌握和操作,减少对操作员工的培训时间,减少操作员工的工作劳动强度。此应用宏程序具有很好的应用价值。
参考文献:
[1] 张则强. 桥式起重机吊重二自由度摆角模型与仿真[J]. 西南交通大学学报起重运输机械, 2006,41(6):698-699.
[2] 岳文翀. 基于软测量技术的桥式起重机防摇控制方法研究[J]. 起重运输机械, 2017(1):55-58.
[3] 李伟. 基于动态误差最小的起重机最优消摆控制[J]. 电气自动化, 2002年第5期:8-12.
[4] 吴晓. 基于降维观测器的起重机吊重防摇系统研究[J]. 计算机仿真, 第24卷第08期, 2007年08月:.323-326.




共0条 [查看全部] 网友评论