


关键词:视频测速 二值法 摄像头 特征点
Abstract: According to the movement characteristics of the coal trains, we adopt the method of video speed measuring method. Video speed measuring system mainly includes the ARM7 chip, a single camera, liquid crystal display part. Video speed measuring method is characterized by coal train edge contour points. To process the image containing train contour binary. According to the feature points in the move by the number of pixels of the image, we compute the distance of the train operation, and then compute the speed of the train. The method has good electrical interference, high accuracy, low cost, flexible performance, etc.
Key words: Video speed Binary method Camera Feature points
【中图分类号】U284.66+2 【文献标识码】B 文章编号1606-5123(2018)09-0000-00
1 引言
随着我国国民经济的快速发展,铁路运输在国家经济建设和正常运转中起着越来越重要的作用。散煤运输作为铁路运输的重要组成部分。运煤列车在让车、曲线区段运行、制动时,线路两侧散落的煤粉小颗粒是有相对气流而产生的。列车在隧道中穿梭形成“活塞式”结构,使表面较小的煤尘以及较大的煤颗粒吹落在路基上面和道路的两侧。隧道墙壁、屋顶和接触面都有小的煤颗粒吸附,厚度比轨面都厚。当火车车轮通过轨面时,由于钢轨和轨枕板的压缩,这些煤颗粒被压缩成更小的煤尘。当后续列车再次通过时,风把这些灰尘吹起,使隧道内的粉尘污染加剧,形成恶性循环[1]。
为了保证抑尘效果和减少抑尘剂的浪费,抑尘剂喷淋装置应当根据车辆当前的行驶速度来动态调整,所以测量车的当前速度成为整个控制过程的核心问题。
2 单目视频测速的原理
2.1 单目视频测速的硬件组成
如图1所示,单目视频测速系统主要有一个摄像头、ARM7芯片、液晶显示部分组成。

2.2 测速原理分析
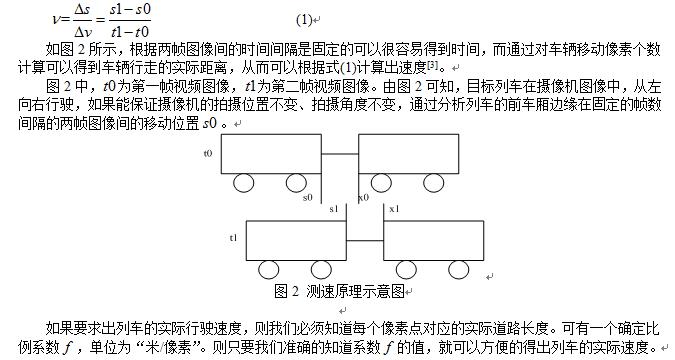
基于视频的车辆测速系统主要是对连续的两帧图像进行分析处理来计算车辆的速度[2]。
视频测速的实现主要分为两个步骤:
第一、提取目标物体移动的像素个数。这一过程涉及到在视频图像中物体的定位,在不同光照、不同焦距、不同角度、摄像头不同型号等条件下,物体定位的精确性变化较大。即使在相同的光照条件下,摄像头的微小变化也可能对物体的定位精度产生很大影响。
两次对同一对象在很短的时间内拍照,即使摄像机的位置是绝对固定的,对象没有移动位置,两张照片也不可能每个像素点的灰度值完全对应一致,这是由摄影曝光的随机性决定的。
摄像头发送的视频信号也有小规模的变化,也许这种变化人的眼睛无法察觉,但可能会影响软件定位算法的准确性。因此,在一定时间内,对象运动的像素个数不一定是固定的,会有一些误差。这个误差是随机产生的,与收集装置没有什么关系。
第二、计算物体移动一个像素点时,实际运动的距离是多远。这个过程涉及到相机坐标与世界坐标之间的转换,属于计算机视觉领域的范围。通常需要先标定摄像机的参数,摄像头必须是固定不动的。实际上,摄像机安装在室外,由于各种外界因素的影响,经常会产生小振幅的震动,这种震动很有可能会造成摄像机标定的参数与实际参数不匹配,无法得到的镜头的坐标到实际坐标之间的变换矩阵,从而导致一个像素的距离和实际距离有误差,这个误差是随机和难以预测的。
虽然视频测速的方法中存在很多误差,但在允许的精度范围内,其理论研究和实用性研究是很有价值的。
从视频中提取出的连续帧的图像数据有如下特点:
(1)连续两个图像间有一个固定的时间间隔;
(2)连续两个图像间的车辆目标的位置有相对移动。
根据以上特点,可以得出车辆目标的运动速度:
2.3 列车特征点图像的预处理
在识别列车特征点时,使用摄像头提取的图像最初都是彩色图像。彩色图像都是有3个颜色分量组成,这3个颜色分量可以组成大量的颜色信息。这样既增加了计算机的存储压力同时也降低了系统处理的速度[4]。灰度图像就是我们平时所指的黑白图像,它只含有亮度信息,不含有彩色信息。亮度共有256个级别,最亮用255表示,最暗用0表示。在彩色图像中存在大量的和提取特征点不相关的信息,因此图像预处理首先要做的就是对列车特征点进行灰度化处理。
图像的二值化就是使整幅图像中只有0和255两个灰度值,不再存在其他的灰度值。二值化图像在数字图像处理中占有重要的地位。图像的二值化处理是一种典型的图像分割技术,它主要依据物体和背景不同的灰度分布来判断哪些点是目标物体,哪些点是背景。灰度图像的二值化就是选择一个闭值 ,图像中若某像素点的灰度值小于 ,则把该像素的灰度值定为0,若某像素点的灰度值大于 ,则把该像素点的灰度值定位255。由此可见选择闭值 是图像二值化的关键。由于闭值 的选取情况不同,可分为全局闭值、局部闭值和动态闭值三种方法。
全局闭值是由图像的直方图或灰度空间的分布来确定一个闭值,这种方法比较简单。用这种方法可以实现灰度图到二值图的转化。使用全局闭值的方法来分离目标和背景,其效果很明显。分布呈双峰的直方图的图像的效果较好。但对于光照和噪声等因素导致很多图像的直方图不呈双峰状,其二值化效果很差。
局部闭值法是由邻域计算模板计算考查点的邻域来实现考查点与邻域点的比较的一种方法。虽然非均匀的光照条件影响图像的整体灰度分布,但对图像的局部性质没有什么大的影响,因此,局部闭值法比全局闭值法应用更广泛、更有效。
动态闭值法是一种自适应二值化方法,它以像素自身及其邻域灰度变化的特征为闭值进行分割,由于它考虑了每个像素邻域的基本特征,所以它可以更好地突出背景与目标物体。
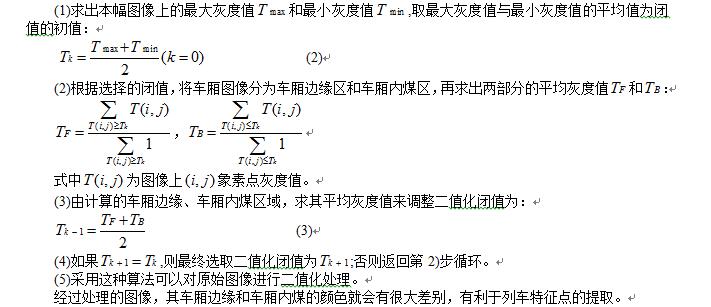
本实验中,图像中车厢内煤粉的灰度值与车厢边缘的灰度值差距很大。通常情况下,车厢的颜色都是灰色的,煤粉的颜色是黑色的。但有时由于光照和气候条件的变化,列车车厢的灰度值变化很大。如果采用固定的或单一的闭值来进行图像二值化处理,可能不可以准确的辨别出列车车厢边缘与煤粉的颜色。因此仅仅根据车厢边缘、煤色来区分图像会存在很大的差异。本文使用迭代的方法来求图像的二值化闲值,根据每一幅图像的实际灰度值分布来动态确定该图像的二值化闭值[5],方法如下:
3 低速列车测速系统
喷淋装置在进行洒水喷雾作业时,喷雾抑尘剂应实时根据车速调节喷雾的大小,以确保在煤的表面均匀喷洒抑尘剂。因此,列车速度的实时访问尤为重要。
视频测速技术利用视频图像中列车的二维位置和提前标定的一些摄像机参数来换算出列车的实际三维位置,在一个固定时间间隔内连续拍摄两帧图像,从两帧图像可以计算出列车行进的像素点个数以及列车在三维图形中行走的距离,因此,可以计算出列车的运行速度。
3.1 运动车辆检测及运动研究
采用视频测速的方法来测量运动列车的速度,我们最关心的是怎么样从视频图像中提取出列车的特征点及运煤列车车厢的边缘轮廓。通常情况下,从视频图像中可以看出列车的运行踪迹。运动前景分割就是从视频图像中分割检测出我们需要的运动列车的特征点。运动前景分割是计算机视觉和视频图像跟踪领域的核心内容。从列车的视频图像中准确的分割出列车信息是后期列车测速的基础,是视频测速的主要问题。
视频图像的分割方法大都结合空间特征和时间特征进行的。空间特征主要有纹理、颜色、亮度、边缘等,时间信息主要指两帧图像之间的差别信息。这两种分割方法几乎应用于所有的视频图像里。到现在为止,已经提出了很多种分割算法,但其分割的步骤都大同小异,可以归纳如下:首先通过各种滤波算法对原始的视频图像数据进行滤波处理,这样有利于图像分割;再提取视频图像中的特征信息,如颜色、灰度、亮度等;然后以某种分割标准来定图像分割方案,由提取的特征信息将视频数据进行分类;最后再进行有关的处理。
由于运煤列车的车厢很多,列车很长,常用的图像全局特征提取算法无法得到良好的分割效果,所以我们采用局部特征提取的算法对列车的视频图像进行处理[6]。
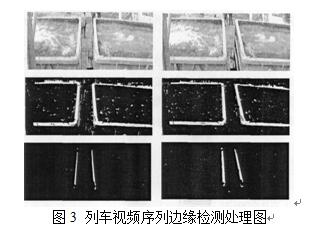
分析采集到的列车视频图像信息,可以看出当列车车厢交界处处于摄像头视野中时是最可以清楚的分辨出列车运动特征的时刻。在这个时候,视频图像中的车厢边缘特征很明显,且车厢前后侧边缘特征正好与列车的行进方向垂直,边缘检测后再利用形态学算法处理,这样可以清晰的看出车厢的边缘轮廓。
利用边缘检测对列车视频序列中两帧图像进行运动特征检测的结果如图3所示。首先对视频图像进行边缘检测,然后再对图像进行形态学处理,以此来达到消除噪声和消除水平边缘轮廓的效果。图3为列车视频序列边缘检测处理图。
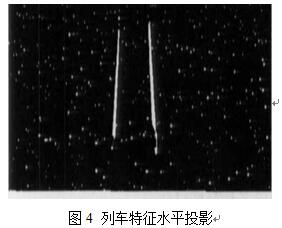
使用边缘处理列车的视频图像后,得到二值化图像,再经过滤波和形态学处理,这样就得到了列车车厢边缘轮廓图。此图具有车厢与煤粉灰度值差别大的明显特点,而随着列车的前进,此区域的灰度值变化很明显。我们可以通过二值化图像的分析,找到车厢特征点的确切位置[7]。由于本文主要是求列车的水平前进速度,因此摄像头在列车的垂直方向上拍摄图像。由水平投影,我们就可以得到列车的特征点以及特征点在当前图像中的位置。列车动态特征水平投影示意图如图4所示。
4 车辆测速模型
4.1 车辆测速方案设计
在喷洒抑尘剂现场,由于喷淋装置的流量有限和对喷洒抑尘剂均匀覆盖煤粉表面的要求,在通过喷洒装置时,列车的速度一般限制在15千米/时以下。
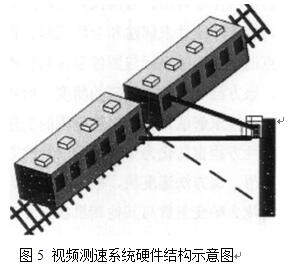
在搭建视频测速系统的硬件设备时,根据分析我们可以看出使用的运动列车的特征点为车厢的中间连接处和车箱的侧壁边缘处。我们采用摄像机跟车厢中部等高,摄像方向与列车轨道方向垂直的方法来安放摄像机,这有利于摄像机的标定和运动特性的检测[8]。视频测速系统硬件结构如图5所示
4.2 车辆测速的数学模型
图像中列车特征点的定位精度是影响测速精度的主要因素,也就是车厢边缘的位移,而不是在图像中车厢边缘坐标与实际车厢坐标间的换算精度,因此,在运算中我们可以采用近似换算的方法来对坐标值的矩阵参数进行求值和换算,这种近似换算的方法对最后测速的精度影响不大,但它可以大大减少运算量,测速精度也可以满足系统要求。
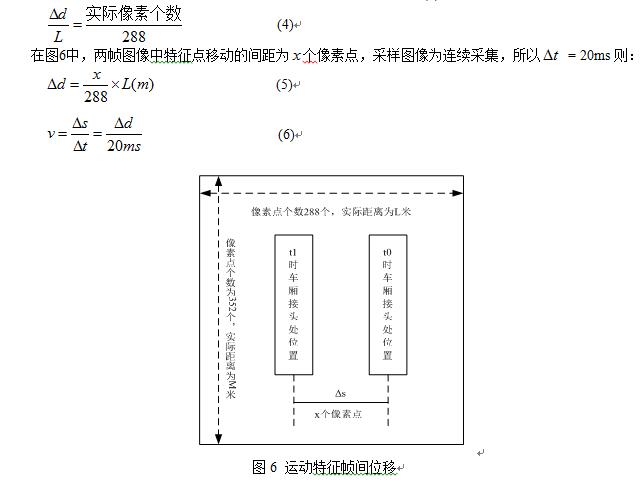
我们采集的视频图像的分辨率为352*288,频率为50FPS,都是标准的视频图像[9]。由标定后的图像模型测得,视频图像在水平方向上实际拍得的空间距离为L米。图像上列车特征点的移动,如图6所示。
假设标定后的摄像机获得的图像不需要考虑透视效果。则由公式(4)可以求出车厢接头处的实际位移:
5 结束语
从液晶显示模块可以看出视频测速方法测得的列车的速度,通过与列车司机记录的实际运行速度相比较,通过计算得出误差小于等于5%,在误差允许的范围之内。通过多次实验发现,列车特征点中心的选择是影响此系统的主要原因。
参考文献
[1]杨绍华.图像检测技术在运煤列车抑尘作业中的应用研究[D].北京:北京交通大学硕士学位论文,2007:3-5.
[2]吴学功.基于USB摄像头的数字图像检测技术研究[D].南京:东南大学硕士学位论文,2006:19-21.
[3]叶森.反向工程中的数字近景摄影测量原理研究.[D]上海:上海交通大学硕士学位论文,2003:26-28.
[4]肖玉强.基于数字测量的大尺寸精密测试技术研究[D].西安:西安电子科技大学硕士学位论文,2010:45-47.
[5]吉志宏.图像实时采集系统的研究与设计[D].北京:北京邮电大学硕士学位论文,2008:30-32.
[6]程转伟.数字图像处理技术在涂装表面缺陷监测中的应用[D].郑州:河南科技大学硕士学位论文,2008:28-30.
[7]郭勇.港口汽车输运流程优化研究与实现[D].北京:北京交通大学硕士学位论文,2009:34-36.
[8]姜欣.基于摄像测量的路面平整度监测和起吊设备的智能视觉研究[D].长沙:国防科技大学硕士学位论文,2008:36-38.
[9]郝健.超声波无损检测中图像处理方法[D].鞍山:辽宁科技大学硕士学位论文,2007:29-31.
作者简介
赵姗姗(1989- )女 硕士研究生 助教 研究方向:电气工程和计算机科学方向
丁新超(1989- )男 硕士研究生 助教 研究方向:自动控制和计算机科学方向




共0条 [查看全部] 网友评论