



关键字:工业机器人;伺服系统测试平台;惯量;控制误差;抗扰动
1 引言
工业机器人是面向工业领域的多关节机械手或多自由度机器人,是一种依靠运动控制器、伺服系统和减速器等装置自动工作的机器。据世界机器人联合会IFR统计,中国已占据了全球制造业的众多工作机遇,并逐步用机器人取代人工完成这些任务。中国作为全球最大的工业机器人使用市场,每年对工业机器人需求量增长率达到25%以上。目前,工信部组织制订的我国机器人技术路线图及机器人产业“十三五”规划初稿提出,力争到2020年,形成较为完善的工业机器人产业体系,高端市场占有率达到45%以上。鉴于目前面临的工业机器人关键零部件主要靠进口,国家首次将机器人及零部件的发展作为发展规划的重点发展对象之一,这将促进国内机器人的产业链快速发展[1]。
2 技术路线
本系统研究将紧紧围绕工业机器人关键部件——高速伺服控制器研究[2-5,7],综合嵌入式技术、计算机技术、数字信号处理技术等工业机器人专用高速伺服控制器,进行高精度控制策略研究。
首先在了解国内、外工业机器人现状和市场需求的前提下,结合前期研究成果,制定项目研究的技术方案,进而研究工业机器人关键模块技术和应用研究;其次,在理论研究的基础上开发设计工业机器人专用高速伺服控制器样机;再者,试制样机进行相关试验研究和改进工作;最后,在有需求的企业推广应用本项目的研究成果。
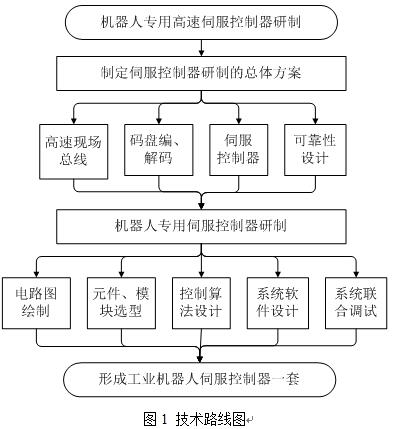
通过对市场上各主要生产公司的工业机器人进行研究,结合企业自身发展规划,完成了工业机器人专用高速伺服控制器总体方案的制定。根据项目研制情况,制定了完整的技术路线,如图1所示。
3 系统总体设计
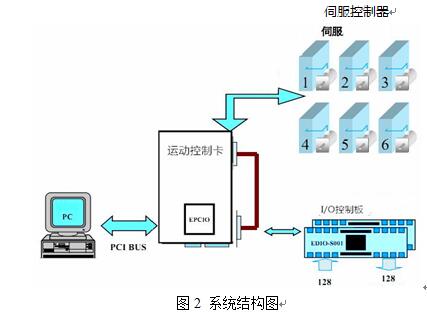
系统[6]主要由工业PC液晶+显示模块、运动控制板卡、I/O控制板、外部通信模块等部分组成。其中液晶显示模块处理人际交互;外部通信模块与PC机连接,示教器与I/O板连接,使得各部件可以接受PC机的控制,实时改变控制参数;I/O板主要功能为完成外设的传感器信号的输入/输出控制;运动控制板卡主要工作根据PC机给定的控制策略及指令控制伺服电机完成各种运动。具体如图2所示。
4 硬件设计
针对现代工业对工业机器人控制系统的开放性、通用性、可扩展性的要求越来越高。工业PC平台以其良好的综合成本优势、友好交互界面、强大运算能力和多样的可扩展功能、便利开发方式,促使基于工业PC硬件平台的运动控制技术获得了越来越广的应用。用户可使用VC++等高级编程语言,进行人机界面开发、直接采用比较成熟可靠的运动函数,完成控制软件的开发,在软件修改和添加等功能上非常方便,而且开发好的软件具有很强的移植性。
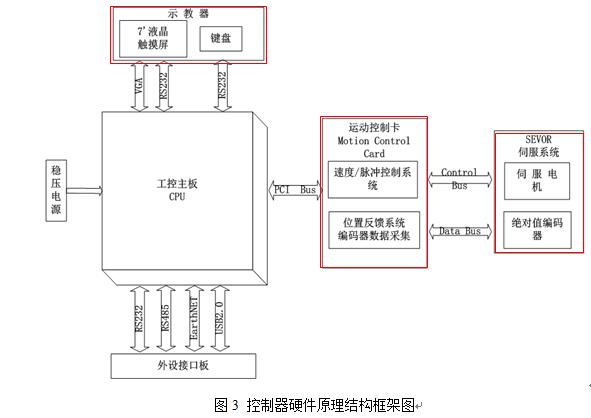
本项目采用工业IPC+PMAC运动控制卡的架构模式,设计了一款基于Visual C++高级编程语言的工业机器人软件控制系统。PC上位机Visual C++程序主要负责处理与用户的信息交互、获取机器人各项运动参数、计算机器人运动轨迹并向下位机发送指令等;而运动控制卡则负责对每个关节电机进项伺服控制(如升降速处理、脉冲输出、直线圆弧插补、原点限位监测等)。
总体硬件设计架构,各部件组成电路原理图,如图3所示。
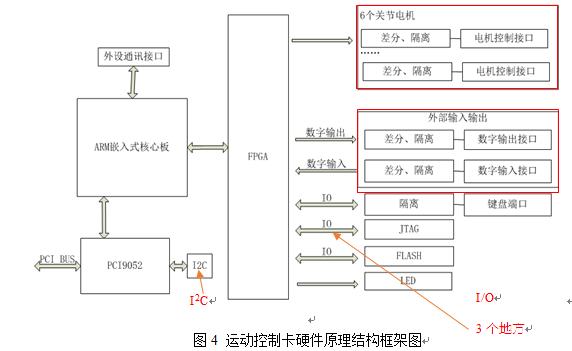
本项目所设计的运动控制卡是基于PCI总线,利用高性能ARM微处理器及FPGA[8]可编程器件实现多伺服的多轴协调控制的高性能的伺服运动控制卡,具有Pulse脉冲计数输出、数字I/O、D/A数模转换输出等功能,可以发出高频连续脉冲,采用PWM控制方式通过调整脉冲频率制电机转速,用脉冲数量来控制电机的转角大小,脉冲输出方式分为脉冲+方向、脉冲+脉冲两种。脉冲计数器功能可用于采集编码器的角度位置,给机器提供各关节的准确的位置反馈,形成位置闭环反馈系统以减小传动误差。数字I/O点可用于机械限位、机械原点及其它设备运行状态检测等。速度控制方式包括S型和梯型两种加减速模式。轨迹规划中有多轴联动直线插补和圆弧插补等。产品广泛应用于工业自动化领域中需要精准定位控制的系统。具体实施方案就是将底层运动控制软件和硬件集成在一起,使其能够满足伺服电机控制所需的速度、位置控制等各项功能,这些功能能通过计算机方便地被调用,充分发挥PC机的强大功能。如图4所示。
5 控制器实物图及装机性能测试
(1)系统设计完成后,进行了测试。所研制控制器系统实物如图5所示。

(2)整机性能测试[9]
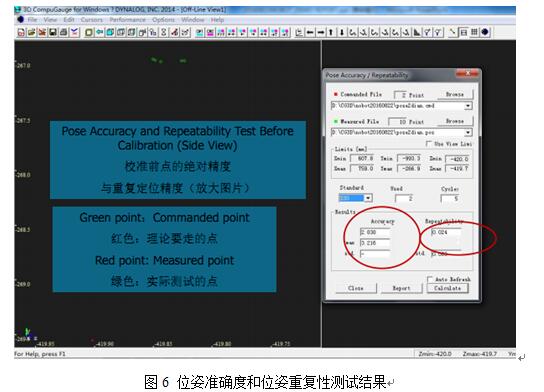
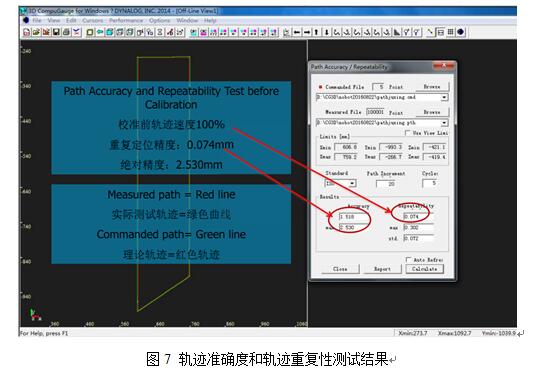
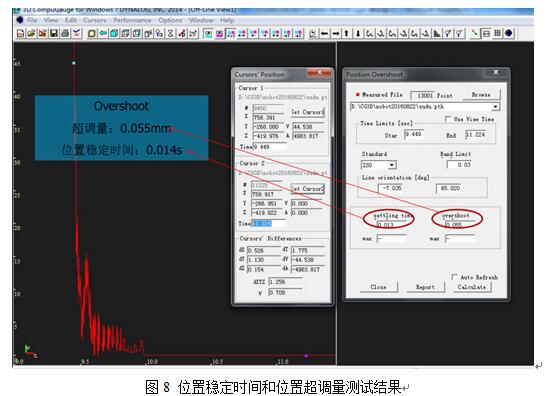
以下是采用Dynalog Inc.USA公司机器人轨迹测试性能评估系统对研制控制器在六关节机器人上的整机性能测试图。具体测试依据GB/T12642-2013工业机器人性能规范及其试验方法要求进行位姿准确度和位姿重复性、轨迹准确度和轨迹重复性、位置稳定时间和位置超调量性能测试,具体如图6~图8所示。
6 小结
通过采用Dynalog Inc.USA公司机器人轨迹测试性能评估系统和校准系统,对研制控制器控制的六关节机器人进行位姿准确度和位姿重复性、轨迹准确度和轨迹重复性、位置稳定时间和位置超调量六项整机性能测试和校准,通过对测试结果进行分析,达到本次研制的目标,可应用于码垛、搬运等对控制精度要求不高的生产现场。
参考文献:
[1]王田苗.全力推进我国机器人技术[J].机器人技术与应用,2007,2:17-23
[2]丁学恭.机器人控制研究[M].杭州:浙江大学出版社,2006.
[3]孙树栋.工业机器人技术基础[M].西安:西北工业大学出版社,2006.
[4]张云生,祝晓红.自适应控制器设计及应用[M].北京:国防工业出版社,2005.
[5]蔡自兴.机器人学[M].北京:清华大学出版社,2000.
[6] 卢正宇.六自由度机器人控制算法与实验样机研究[D].哈尔滨工程大学硕士学位论文,2009:3—8.
[7]刘金琨.智能控制[M].北京:电子工业出版社,2005.
[8]Cyclone FPGA family data sheet[X]. Altera Corporation,2003
[9]GB/T12642-2013工业机器人性能规范及其试验方法[S].
作者简介:
苏渊博(1984-) 男 陕西人 硕士学位 高级工程师 研究方向:工业机器人






共0条 [查看全部] 网友评论