



关键词:果园植保机器人;虚拟遥控器;状态监控;数据处理
1 引言
目前我国果园机械化程度不高,从修枝到摘果需要大量的人力,劳动效率与发达国家相比还处于一个较低的水平[1]。随着城镇化进程的推进,果农数量不断减少,传统人力模式将不能满足社会发展的需要,因此亟待发展我国果园机械设备[2],并且使其自动化和智能化,从而减轻果农负担,提高劳动效率。
电动履带式果园植保机器人能够避免传统植保时农药对果农造成的伤害,同时减轻果农劳动负担,提高生产效率[3-4]。因某些果树植株高大,且某些果园地形复杂,使用无人机植保有一定局限性,电动履带式果园植保机器人机动灵活,通过性好[5]。本文针对电动履带式果园植保机器人设计了操动装置——虚拟遥控器。虚拟遥控器设计简单,能够缩短果园操动装置的研发周期[6],在研发前期,使用虚拟遥控器控制果园植保机器人下地测试,促进了项目进展。虚拟遥控器能够在实物遥控器出现故障时及时控制果园植保机器人工作,两者构成冗余方案,从而提高工作效率。
2 虚拟遥控器总体设计方案
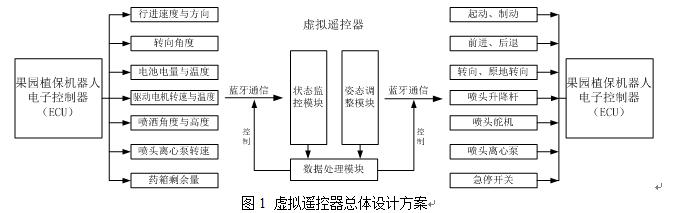
根据电动履带式果园植保机器人的操控需求,虚拟遥控器需实现状态监控、姿态调整和数据处理的功能。状态监控功能为实时监视果园植保机器人的工作状态,包括行进速度、转向角度、电池电量与温度、驱动电机转速与温度、喷洒角度和高度等状态量;姿态调整功能为实时调整果园植保机器人的执行机构,包括起止进退转(起动、制动、前进、后退与转向)、喷头升降杆高度、喷头舵机角度和喷头离心机速度等动作量;数据处理功能为数据通信和数据存储,数据通信为虚拟遥控器与果园植保机器人电子控制器ECU之间的数据交互,数据存储为将接收的状态数据和发出的命令数据保存,以便性能分析和故障诊断时使用。虚拟遥控器总体设计方案如图1所示。
3 状态监控模块设计
操作虚拟遥控器的果农就是电动履带式果园植保机器人的驾驶员,驾驶员必须实时掌握果园植保机器人的工作状态,才能做出正确的操作指令,以保障果园植保机器人的正常工作。根据以上分析,状态监控模块是虚拟遥控器的“感觉器官”,需要实时地将果园植保机器人的工作状态展示出来。
3.1 状态监控模块需求分析
状态监控模块需要实时检测电动履带式底盘和植保喷洒设备的工作状态。电动履带式底盘的工作状态有行进速度和方向、转向角度、电池电量与温度、驱动电机转速与温度。植保喷洒设备的工作状态有喷洒角度、喷洒高度、喷头离心泵转速和药箱剩余量。根据以上分析,状态监控模块需要将以上数据实时显示,供操作手掌握当前工作状态。本设计每1秒刷新一次显示数据,以满足实时要求。
3.2 状态监控模块程序设计
状态监控模块的界面主要使用User Interface栏中的label组件和Layout栏中的Horizontal Arrangement组件。根据监控参数的数量及各参数的相关性设计界面,界面如图2所示。

为了判断数据传输是否正确,果园植保无人机电子控制器ECU发送的行进速度及方向、电池电量及温度等状态参数都有一个识别码。在状态监控模块程序中,为了接收ECU发送的识别码,需要先定义识别码变量。部分定义识别码变量程序如图4所示。

状态监控模块程序中的识别码验证程序和状态参数显示程序全部定义在接收子函数中,设计中采用每验证一个识别码,将对应的参数显示。识别码错误,对应的参数显示框为“error”。某个识别码错误,不影响下一个识别码验证。部分识别码验证程序和状态参数显示程序如图5所示。

4 姿态调整模块设计
操作虚拟遥控器的果农需要及时调整果园植保机器人的行为动作,避免果园植保机器人撞到障碍物,以及全方面喷洒叶肥或杀虫剂。果园植保机器人必须按照虚拟遥控器发出的有效指令进行动作,否则果园植保机器人失控,造成人员、果林受损或喷洒效率降低。根据以上分析,姿态调整模块是虚拟遥控器的“肢体器官”,需要实时地调整果园植保机器人的姿态保障其正常工作。
4.1 姿态调整模块需求分析
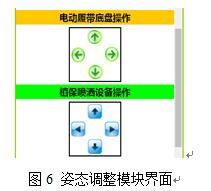
姿态调整模块需要实时调整电动履带式底盘和植保喷洒设备的动作姿态。电动履带式底盘的动作姿态有启动、制动、前进、后退、转向、原地转向、加速和减速。植保喷洒设备的动作姿态有喷头高度升降调整、喷头角度调整和喷头离心泵转速调整。姿态调整模块需要将以上调整命令发送给果园植保机器人电子控制器ECU。本设计每调整一个动作参数,虚拟遥控器将所有动作参数发送一次,没有调整的参数值不发生变化。
4.2 姿态调整模块程序设计
姿态调整模块的界面主要使用User Interface栏中的Button组件和Layout栏中的Horizontal Arrangement组件。根据姿态调整参数的数量及各参数的相关性设计界面,界面如图6所示。
根据需求分析,每调整一个动作参数,虚拟遥控器将所有动作参数发送一次。姿态调整模块程序中的全部动作参数发送程序定义在发送子函数中,部分动作参数发送程序如图7所示。当按下姿态调整模块界面中的操作按钮时,首先相应的参数发生变化,然后调用发送子函数将所有参数发送一次,部分操作按钮程序如图8所示。

5 数据处理模块设计
虚拟遥控器与果园植保机器人电子控制器ECU之间需要进行无线数据通信,才能实现状态监控模块和姿态调整模块的功能。同时,为了便于故障诊断和性能分析,需要记录状态监控模块接收的数据和姿态调整模块发送的数据。
5.1 数据处理模块需求分析
果园植保机器人电子控制器ECU将传感器采集的电动履带式底盘和植保喷洒设备的工作状态参数通过无线设备发送给虚拟遥控器的状态监控模块,虚拟遥控器的姿态调整模块将电动履带式底盘和植保喷洒设备的动作姿态调整参数通过无线设备发送给果园植保机器人电子控制器ECU。由于虚拟遥控器安装在广泛使用的智能手机上面,智能手机都安装有蓝牙模块,所以采用蓝牙模块作为无线通信设备[7-8]。在发送和接收各种参数时,将这些参数保存下来,供故障诊断和性能分析时使用。
5.2 数据处理模块程序设计
数据处理模块程序分为两部分,一部分为蓝牙通信配置程序,另一部分为数据存储程序。蓝牙通信配置的界面由User Interface栏的List Picker组件和Button组件构成。List Picker组件实现搜索蓝牙设备的功能,并将搜到的蓝牙设备以列表形式展现,当选择某个蓝牙设备时,将此蓝牙设备的Mac地址赋给事先定义的变量,搜索蓝牙设备程序如图9所示。Button组件实现连接和断开蓝牙设备的功能,系统初始化后,初次点击Button组件,将连接蓝牙设备,再次点击将断开蓝牙设备,连接和断开蓝牙设备程序如图10所示。


数据存储程序由Storage栏中的File组件实现。程序中每5s存储一次数据,数据保存在txt文档中,并自动添加到文档内容的末尾,不会覆盖原有的数据,以免造成数据丢失,部分数据存储程序如图11所示。

6 虚拟遥控器性能验证
在App Inventor软件的Designer设计界面完成虚拟遥控器的外观制作,在Blocks Editor块编辑界面完成数据处理和逻辑算法的编辑。虚拟遥控器的外观如图12所示。
设计完成后,需要生成apk文件安装到智能手机。生成apk文件的步骤为选择App Inventor软件的Build菜单项,在其下拉菜单中选择provide .apk to my computer选项,即可生成apk文件,将此文件复制到智能手机中,双击该文件即可安装。安装到智能手机后的界面如图13所示。

为了验证虚拟遥控器的性能,搭建了验证试验台,果园植保机器人电子控制器ECU通过蓝牙模块与手机蓝牙模块配对。首先验证虚拟遥控器接收电子控制器ECU发送的工作状态参数;其次验证虚拟遥控器向电子控制器ECU发送动作指令,借助电脑端的串口调试助手显示动作指令参数;最后验证通信距离,在没有障碍物的情况下,30米内通信正常。虚拟遥控器性能验证平台如图14所示。

7 结论
基于App Inventor软件开发虚拟遥控器大大缩短了遥控设备研制的周期,由于虚拟遥控器依靠智能手机进行工作,降低了研制费用。经过性能试验验证证明,电子控制器ECU与虚拟遥控器通过蓝牙模块能够进行有效通信,通信距离为30米以内,满足控制电动履带式果园植保机器人的距离要求。
参考文献:
[1] 刘焱选,白慧东,蒋桂英.中国精准农业研究现状和发展方向[J].中国农学通报,2007,2(7): 577-582.
[2] 王元杰,刘永成,杨福增,等.温室微型遥控电动拖拉机的研制与试验[J].农业工程学报,2012,28(22): 23-28.
[3] 阳帅,蒋蘋,胡文武,等.履带式拖拉机可视遥控驾驶系统的设计及试验[J].湖南农业大学学报,2016, 42(5): 561-566.
[4] 樊桂菊,王永振,仉利,等.履带风送式喷雾机的设计与试验[J].农机化研究,2018, 40(5): 117-120.
[5] 李格伦,崔天时,刘春莉,等.农用轮式机器人运动控制系统设计与试验[J].农机化研究,2018,40(2): 192-196.
[6] 许开芸,汪木兰,饶华球,等. NGR01型多关节机器人智能遥控器的研制[J].南京工程学院学报(自然科学版), 2006, 2: 56-61.
[7] 董尧嘉,李彬.基于stm32的蓝牙遥控仿生六足机器人[J].科技创新导报.2018, 10: 175-176.
[8] 杨英明. Andriod手机APP蓝牙控制智能车解决方案[J].单片机与嵌入式系统应用.2017, 3: 71-74.
作者信息:
姓名:边文超 工学硕士 研究方向:系统控制、仿真与建模






共0条 [查看全部] 网友评论