



1 引言
机器人作为科技发展的产物,已广泛应用于生产实践中。随着现代科学技术的迅速发展,控制对象、控制器以及控制任务的日益复杂化,对机器人高品质控制的需求也应之而生。由于机器人系统具有很强的藕合性和不确定性,外部扰动大,且又要求较高的跟踪精度,因此对机器人的轨迹跟踪是一个比较困难的控制问题,国内外专家对机器人轨迹跟踪都有深入的研究。
国外研究人员研究方向主要集中在利用专家经验、模糊推理、遗传算法、神经网络等智能算法进行机器人轨迹控制的研究[1-5]。文献6提出了一种新的模糊遗传算法求解混合车辆路径问题,通过改进的模糊逻辑控制器实现交叉概率和变异概率的动态调整,以加快算法收敛速度并避免算法陷入局部最优解。文献7提出了一种基于Dijkstra算法的改进遗传算法路径规划策略,以解决传统遗传算法在狭窄环境下难以有效初始化的问题。文献8针对目前路径规划算法存在的问题,提出类脑智能算法应用于路径规划的探索,同时给出路径规划在农业装备应用的新思路。文献9重新定义了模拟退火系数和栅格系数,提出了一种可以解决贪心算法局部收敛问题的改进模拟退火算法。文献10提出一种改进A*算法;首先建立栅格地图,基于传统A*算法,进行邻域扩展,将传统8邻域扩展到24邻域,使路径方向具有更多选择,减少不必要的转折点。文献11为实现移动机器人轨迹的准确跟踪,提出一种基于免疫遗传算法的移动机器人控制器参数整定方法。文献12提出了在动态环境中,基于遗传模糊算法的移动机器人的局部避障规划方法,该方法适用于复杂环境情况。
本文以乘客乘候梯时间和电梯能耗为优化目标,建立电梯智能群控多目标优化模型,并通过改进遗传算法对派梯方案进行优化,最后借助电梯智能群控调度系统仿真平台对本设计方案进行仿真测试,实验结果表明通过改进的遗传算法不但减少了乘客乘候梯时间,而且降低了电梯电能消耗。
2 机器人动力模型

3 基于改进遗传算法的机器人轨迹跟踪策略
首先,由机器人各关节空间变量的补偿值求解位姿误差,将补偿值作为遗传算法的个体,并根据实际要求构造出适应度函数,之后求出个体的适应度大小,选择拥有较大适应度的个体来交叉变异,最后,不停地重复上述操作,直到得出满足要求的染色体。
针对机器人二自由度机械臂路径跟踪优化问题来说,构造的第k个个体的适应度函数能够用下式来表达:
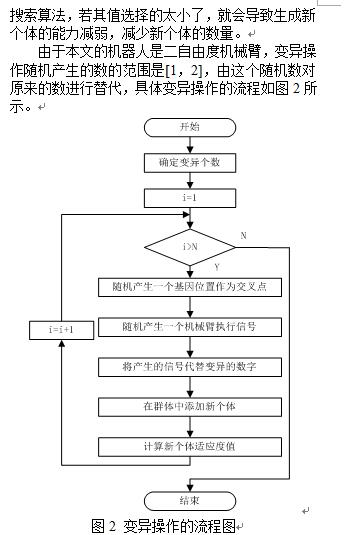
选择算子借用的是达尔文的生存进化原则,选择算子操作的主要功能还是为了能够从该代种群里找出适应度相对较好的优良个体,使适应度越好的个体越能够遗传到下一代种群里面。选择操作通常比较常用的有赌盘选择法、最优保存策略、随机竞争选择等等。
赌盘选择法的具体操作步骤:

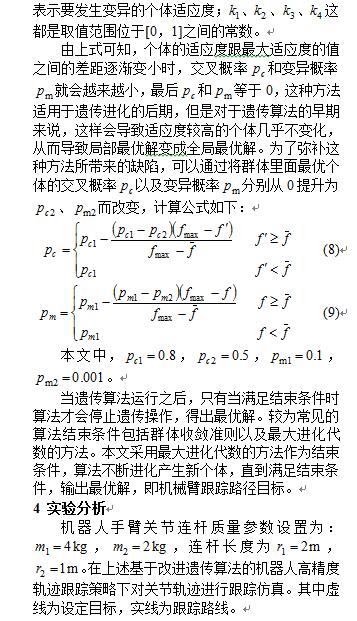
5 结论
设计了一种基于改进遗传算法的机器人高精度轨迹跟踪策略。根据机器人实验平台对本设计方法进行仿真,得出如下结论:
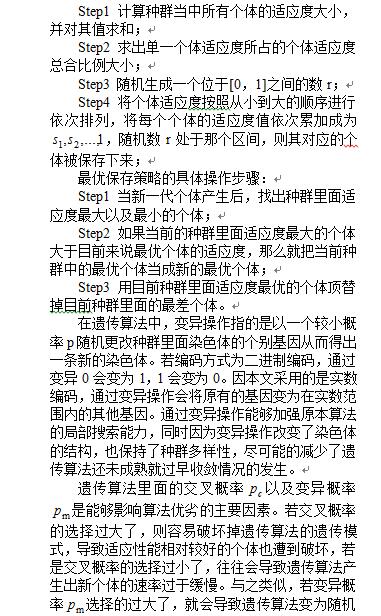
(1)根据机器人二自由度机械臂动力模型设计了基于改进遗传算法的机器人高精度轨迹跟踪算法,构造了合适的适应度函数,并给出了遗传算法中变异操作流程。
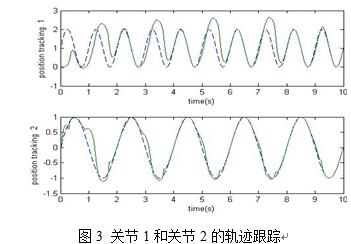
(2)实验结果表明通过改进的遗传算法可以提高机器人二自由度机械臂的跟踪精度,同时提高稳定机械臂关机控制力矩输出的稳定性。
参考文献:
[1]L. Al-Sharif,A. Alqumsan,and R. Khaleel, Derivation of a universal elevator round trip time formula under incoming traffic[J]. Building Services Engineering Research and Technology,2014,35(2): 198-213.
[2]S. W. Wang,C. C. Yan,F. Xiao,Quantitative energy performance assessment methods for exiting buildings[J]. Energy and Buildings,2012,55: 873-888.
[3]Daniel,Carlos H. Llanos. Distributed approach to group control of elevator systems using fuzzy logic and FPGA implementation of dispatching algorithms[J]. Engineering Applications of Artificial Intelligence 21 (2008) 1309–1320.
[4]Pablo Cortés,Luis Onieva. A viral system algorithm to optimize the car dispatching in elevator group control systems of tall buildings[J]. Computers & Industrial Engineering 64 (2013) 403-411.
[5]P. Cortés,J. Larrañeta,L. Onieva. Genetic algorithm for controllers in elevator groups[J]. Applied Soft Computing. 4 (2004) 159–174.
[6]张群,颜瑞.基于改进模糊遗传算法的混合车辆路径问题[J]. 中国管理科学,2012,20(02):121-128.
[7]卢月品,赵阳,孟跃强,刘佳.基于改进遗传算法的狭窄空间路径规划[J].计算机应用研究,2015,32(02):413-418.
[8]王春颖,刘平,秦洪政.移动机器人的智能路径规划算法综述[J].传感器与微系统,2018(08):5-8.
[9]陶重犇,雷祝兵,李春光,孙云飞,周海冰.基于改进模拟退火算法的搬运机器人路径规划[J].计算机测量与控制,2018,26(07):182-185.
[10]王小红,叶涛.基于改进A*算法机器人路径规划研究[J].计算机测量与控制,2018,26(07):282-286.
[11]李琳,任俊霖,邹焱飚,陆州.基于免疫遗传算法的移动机器人轨迹跟踪[J].华南理工大学学报(自然科学版),2013,41(07):13-18+25.
[12]杨敬辉,洪炳镕,朴松昊.基于遗传模糊算法的机器人局部避障规划[J].哈尔滨工业大学学报,2004(07):946-948.
作者简介:
陈庆胜(1977— ) 男 江苏无锡人 硕士 讲师 研究方向:电气自动化技术






共0条 [查看全部] 网友评论