


关键词:STC12C5A60S2单片机;高压气泵;驱动模块;继电器
1 引言
当今,我国经济在不断发展,人民对生活和工作环境提出了更高的要求。越来越多的住宅、公共建筑使用空调系统。空调系统的首要任务是以最低的设计和运行成本为建筑使用者一个舒适、节能、高效、安全的室内环境。但是空调系统不仅仅带给人们舒适的生活、工作环境,也带来能耗大幅度上升等一系列问题。在能源紧缺和提倡创建节约型社会的今天,节能减排问题,越来越受到人类重视,空调系统节能问题不容忽视。
本文针对空调的节能问题以及空调外机的清洗问题设计基于STC单片机的清理机器人,实现空调外机的清洗,设计的空调清理机器人具有永久性、清洁性和灵活性三大特点[1]。
2 机器人系统总体结构设计
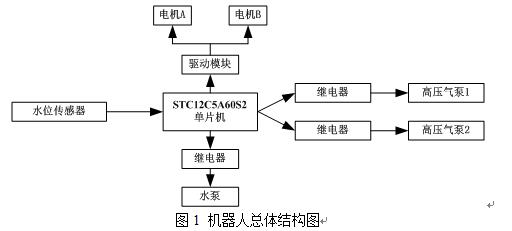
空调清理机器人由水位传感器、水箱、继电器、电机、气泵、水泵、光轴、滑块、立式支架、电源检测系统、电源稳压系统、单片机等器件组成[2]。主要目的是用来减少空调能耗的,通过辅助空调冷凝器散热来减少空调的耗能。冷凝器是一款制冷系统的机件,制冷机的制冷原理是把工质由低温低压气体压缩成高温高压气体,经过冷凝器冷凝成低温高压的液体,通过节流阀节流以后,则成为低温低压的液体。制冷压缩机、冷凝器、蒸发器和节流阀四个基本部件组成了单级蒸汽压缩制冷系统 。它们之间用管道依次连接,形成一个密闭的系统,制冷剂在系统中不断地循环流动,发生状态变化,与外界进行热量交换。因此,为了提高冷凝器的散热效率设计了智能清理机器人[3]。机器人总体结构如图1所示。
3 机器人系统硬件设计
3.1 STC12C5A60S2单片机
STC12C5A60S2单片机中包含中央处理器(CPU)、程序存储器(Flash)、数据存储器(SRAM)、定时/计数器、UART串口、串口、I/O连接口、高速的数电、模电转换电路、串行外设接口、片内R/C振荡电路和外置晶体振荡模块等。STC12C5A60S2单片机完全包括了采集中和控制中所要用到的全部单元的模块,可说的上是一片上完全系统[4]。产生器加上2路PCA系统可又增加2个16位定/计时功能;2个时钟输出口,可由T0的溢出在P3.4/T0时钟输出,T1的溢出在P3.5/T1输时钟出;外部中断I/O口7路,普通的降低形式的中断或0电平触发中断,都支持升压形式的中断PCA模块,Power Down模式可被外置的中断初始化。STC12C5A60S2单片机电路如图2所示。

3.2 继电器电路设计
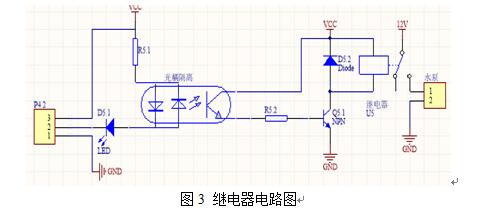
单片机I/O口输出电流很小,无法直接驱动继电器,同时继电器内大电流倒灌可能损坏单片机,因此要进行隔离。该设计采用光耦继电器,光耦继电器室内把开光状态用光耦控制的继电器。通过光耦驱动控制三极管,实现了隔离,同时控制光耦端给合适的电信号(各个光耦允许加在控制端的两端的电压不一样,正常是1.2V左右,电流4-20mA)。由此,光耦另一端光三极管,使信号导通,驱动三极管放大,继电器获得足够的电流使内部的电磁铁动作[5]。继电器电路如图3所示。
3.3 电源稳压电路设计
电源稳压电路给空调清理机器人系统提供恒压、恒流、低波平稳的电源电压。5V稳压电源电路如图4所示。
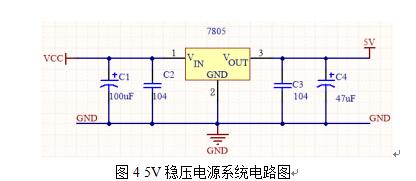
用lm78系列三端稳压IC来组成稳压电源所需的外围元件少,电路内部还有过流、过热及调整管的保护电路。在使用时简单可靠,使用方便。此型号的集成稳压芯片lm78xx,xx代表的数字表示此稳压芯片在稳压电路中的电压输出值,如lm7805表明电路中电压输出为+5V。因为三端固定稳压集成芯片使用方便,电子制作中经常采用。当lm7805稳压芯片温度太高时,稳压芯片的稳压性能将变低,严重的可以损坏;在现实电子使用中,可以在稳压集成芯片上装配合适的散热装置[6]。
3.4 驱动模块电路设计
空调清理机器人采用的是TB6612FNG电机驱动模块,它相对传统的L298N驱动模块具有明显的优势,最明显的则是TB6612FNG体积非常小,而且在额定范围内芯片基本不发热。电机驱动模块电路原理如图5所示。
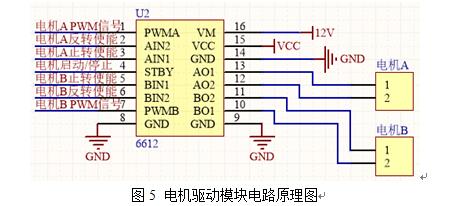
VM提供电机运行电源;PWM脚接单片机PWM信号;AIN1和AIN2为两路电机正反转、制动(或称刹车)控制信号。以电机A的控制为例,说明各端口状态与电机运行情况的关系,。其中0为低电平、1为高平、×为任意电平,悬空时为低电平。
需要注意的是在PWM为100%(即PWM脚始终为高电平)的时候,如果要改变电机转动方向,应该先刹/停车0.1s,然后再提供反转的控制信号,要不然电动机的反向电压也许会使系统电压发生突变,从而使驱动器的芯片跳入自我保护的状态而导致不灵敏;对于全PWM输出状态,若是要变动电动机的转向,尽量也是要先刹车0.1s,再接入反转控制信号,避免使电源电压产生很大波动[7]。
3.5 气泵、水泵选择
高压气泵采用一个高压气泵实现清洗空调外机外壳与散热网的功能。高压气泵是吹吸两用的旋涡气泵,高压气泵特殊的叶片设计,具有压力高、风量大、低噪音、耐高温等特点。采用12V电压供电,在保证清洗效果的前提下尽可能降低功耗、减少噪音,使设备体积减小。将收集的冷凝水使用气泵喷出,形成高压水雾,由此可以使冷凝水的利用率最大化,并实现良好的清洗效果。
水泵采用直流无刷水泵,利用永磁无刷直流电机的原理,在离心力的作用下液体在出口处被叶轮甩出,随着被甩出液体的增加,压力也逐渐增加,最后从水泵的出口被排出。收集的冷凝水通过水泵与高压气泵相结合形成高压气雾,对空调外机散热网进行清理降温。
3.6 运行原理
空调冷凝水通过智能清理机器人的进水口储存到储水箱中,安装在储水箱中的水位传感器会不断地采集储水箱中水量的多少,当储水箱中的储水量达到设置的上限值时,单片机会发出相应的信号通过驱动模块传送给气泵,使清洗装置(气泵)启动,再通过智能清理机器人的出水口开始清洗空调外机,从而保证空调外机清洁干净,有利于空调散热;另外,空调水也可以根据蒸发原理辅助空调外机散热[8]。
4 机器人系统软件设计
空调清理机器人软件部分也是整个系统的核心部分之一,我们不仅仅需要硬件部分,还需要加上软件部分才能使整个系统运行起来。本系统的软件部分主要包括主程序和系统初始化子程序、电机控制程序、水位采集程序、串口通信程序。
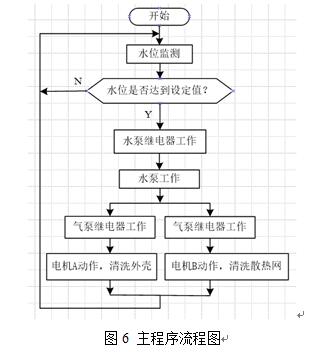
整个设计软件流程图实现的主要是通过水位传感器进行数据采集,采集后送至单片机,单片机处理完毕将信号传递给水泵及气泵。在继电器开始工作时系统的各个模块都要进行初始化操作,以确保最终测量结果的准确性[9]。主程序流程如图6所示。
5 结语
本设计主要是通过空调清理机器人解决空调风机表面附着许多灰尘垃圾问题,从而提升散热效率,减少能源的损耗,达到节能的目的。同时空调清理机器人把空调在制冷时产生的冷凝水,收集起来再利用减少水资源的浪费;也就解决了空调水滴落到地面上造成污染环境的问题。空调清理机器人将空调运转时产生的冷凝水收集起来加以利用,充分利用了水资源,缓解了水资源短缺的局面,空调清理机器人使用低功率设备,在最大程度上减少了用电,
空调清理机器人智能清洗装置的运用减少了人力、物力、财力等资源,简单快捷,方便使用。
参考文献
[1]胡玉轩.基于STC单片机的智能电子温度控制系统设计研究[J].山西电子技术,2017(04):87-89.
[2]赖云波,朱兆优,张雄,王孚贵.基于STC单片机的药液自动喷洒器设计[J].电子质量,2018(08):31-33+40.
[3]曹玉.基于STC单片机的PCR温控系统的设计[D].山东大学,2013.
[4]潘璐璐.基于STC12系列单片机的智能温湿度控制系统的设计与实现[D].电子科技大学,2014.
[5]郭俊锋,李育亮.基于学习字典的机器人图像稀疏表示方法[J/OL].自动化学报,2018-10-10:1-11.
[6]吴家烜.基于555振荡器和STC单片机的液位测量电路设计[J].山西电子技术,2017(05):37-39.
[7]翟宇毅,何宜瑞,刘韵佳,张萌.基于STC12球形机器人能量采集系统的设计[J].工业控制计算机,2018,31(09):119-120.
[8]孙显鹤,郭小凯.室内变电站设备巡检机器人关键技术研究与应用[J/OL].机电信息,2018(27),2018-10-10:100-101.
[9]潘光良,李军,王斌鹏,孙玉霖.农田灌溉自动控制系统设计[J].齐鲁工业大学学报,2018,32(03):58-61.
作者简介:
潘光良(1994.10-) 男 硕士 齐鲁工业大学(山东省科学院)电气工程与自动化学院 研究方向:工业测控网络技术




共0条 [查看全部] 网友评论