


关键字:机器人;巡检系统;设计;智能巡检;推广应用
1 引言
随着变电站无人值班改造和智能化建设需求不断增加,对变电站设备的巡检工作质量要求明显提高。设备运行状态数据是对相关设备开展状态评价的重要依据[1],智能巡检机器人的应用推进了变电站无人值守进程,提高了正常巡检作业和管理的自动化智能水平,有效降低了劳动强度和运维成本[2]。
2 智能机器人巡检系统的必要性分析
2.1 安全性分析
目前的变电站内设备巡检大都是人工巡检的方式,存在以下不足:巡检人员的工作量大,效率偏低;巡检人员存在安全风险,尤其在恶劣天气下;检测数据分散,而且检测结果的准确性缺乏保障;巡检手段相对单一;人工巡检的数据无法及时、准确的录入信息管理系统,影响了变电站的智能化发展[3,4]。智能巡检机器人系统通过红外测温、外观检测、仪表检测、声音采集等多种检测手段,代替人工巡检,减少人工巡检工作量,降低人工巡检安全风险,保障检测结果准确性。
2.2 效能与成本分析
智能巡检机器人系统将以全自主的检测运行模式逐步代替传统的人工巡检,大大减少运维人员工作量,降低巡检人员遭受电磁辐射的危害;通过红外测温、外观检测、仪表检测、声音采集等多种检测手段有效弥补了人工巡检手段单一的不足,为变电站的安全稳定运行提供保障;根据巡检内容要求,机器人将客观、标准的完成检测作业,改变了人工巡检检测数据分散和检测结果不足的缺陷[5]。后台软件可实现对巡检数据科学、长期管理和智能分析判断,自动出具巡检报告。
3 要技术方案
每个运维班配置一台智能机器人巡检系统及后台系统,软件平台布置在各运维班集控站,区域内变电站配置后台系统、巡检轨道、充电室。
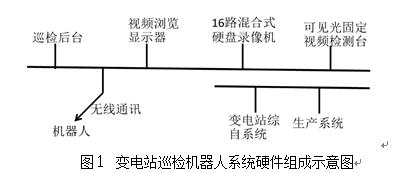
巡检机器人系统为网络分布式架构,整体分为基站层、通讯层和终端层。基站层由机器人后台、硬盘录像机、硬件防火墙及智能控制与分析软件系统组成;通讯层由网络交换机、无线网桥等设备组成,负责建立站控层与智能终端层间透明的网络通道;终端层包括移动机器人、充电室和固定监测点等。智能机器人与后台机之间为无线通讯,固定监测点与后台机之间的通讯为光纤通讯。
站内配置一台巡检机器人,机器人使用独立的无线专网通讯子系统与后台主机通讯。智能巡检机器人和固定监测点将视频和图像信息实时传送到硬盘录像机、后台智能控制和分析系统进行分析和控制。
3.1 系统硬件平台
整个智能巡检机器人系统的硬件组成如图1所示。
3.2 系统软件平台
软件平台采用分层的模块化结构,基于Windows XP/Server 2003操作系统和NetFramework 2.0运行平台[6],采用面向对象的编程语言C#进行托管代码编程,以面向对象的内存实时数据库和大型商用关系型数据库相结合,通过多线程进行耗时任务的后台处理,避免阻塞用户的界面操作,系统性能和可靠性高、维护和扩展方便。提供基于角色的安全权限控制;避免变化死区和定周期采集相合的实时数据存储机制;无损压缩的巡检数据存储技术等。
软件系统的体系结构共分为4层,分别为数据层、功能层、逻辑层和表示层,如图2所示。各模块基于接口编程,广泛应用设计模式,降低模块间的耦合,系统架构清晰,功能扩展方便。
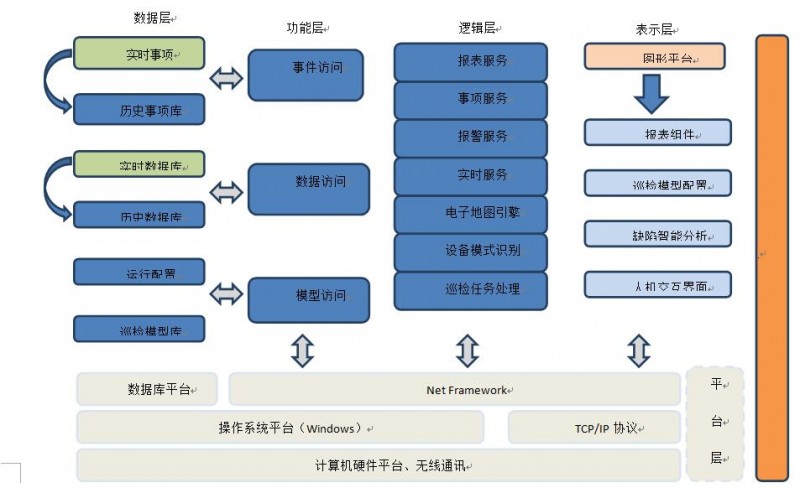
图2 智能巡检机器人系统软件体系结构
3.3 导航定位
巡检机器人的定位巡检系统采用射频识别(RFID)点的导航方式,电子标签定位。在室外移动机器人常用的各种导航方式中,磁导航具有极高的可靠性、抗干扰能力和室外环境适应性。变电站内磁导航道路设计模式,直角拐弯处RFID设置为两个方向埋设,T型路口在转弯处三个方向埋设,十字路口在四个方向埋设。磁轨迹敷设在道路中间,停靠检测点的RFID埋设在磁轨迹的右侧[7,8]。普通混凝土路面上采用的RFID规格直径为50mm,厚度8mm,型号为C111003B;电缆盖板上采用RFID的规格为直径50mm,厚度2mm。所有RFID位于沿机器人行走方向纵向磁轨道右侧,检测用的RFID点,其位置由施工人员根据巡检设备信息和现场实际情况合理选取。移动机器人的底部右侧安装RFID读卡器,这样机器人行驶过程中读到任一RFID时,均能识别出机器人所在的位置和行走的方向[9,10]。
4 推广应用实施
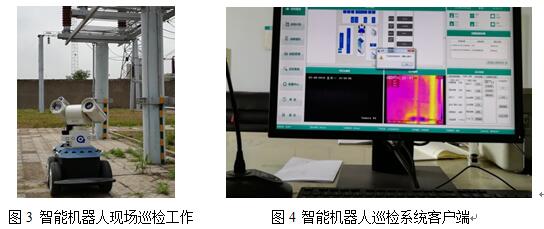
经改进后的智能机器人巡检系统具有无需在停电条件下实施、不需要过渡措施的优点,已在所辖变电站进行落地实施。该机器人系统可以部分代替运行人员在特定的时间进行设备巡视工作,在不要运行人员的参与下按照固定的路线进行巡检,并且自动返回出发地点,同时生成巡视报表。智能机器人现场巡检工作如图3所示。智能机器人巡检系统客户端如图4所示。
5 总结
经改进后的智能巡检系统可有效提高巡检作业的质量和效益,提高对缺陷设备的预警能力,从而提高变电站安全生产稳定运行水平,同时可减轻运维人员的劳动强度和安全风险。
经过试验现场的运行和检测,该机器人系统行动迅速、采集数据准确、适应性强、定位精度高,已在所辖无人值班变电站的进行了推广应用,具有广阔的发展前景。
参考文献:
[1].变电站智能机器人巡检系统[J]. 华北电力技术,2015(05):72.
[2]马一鸣.智能巡检机器人在无人值守变电站的应用[D]. 华北电力大学,2017.
[3]张志飞.变电站机器人智能巡检系统应用研究[D]. 华北电力大学,2015.
[4]赵小伟.变电站智能机器人巡检集中监控系统设计与实现[D]. 山东大学,2017.
[5]彭向阳,金亮,王柯,钱金菊,岳卫兵.变电站机器人智能巡检系统设计及应用[J].中国电力,2018,51(02):82-89.
[6]蔡焕青,邵瑰玮,胡霁,文志科,王兴照,吕俊涛.变电站巡检机器人应用现状和主要性能指标分析[J].电测与仪表,2017,54(14):117-123.
[7]蒋体浩,李月芹. 智能机器人在变电站巡检系统中的应用[J]. 电子世界,2016(18):88-89.
[8] 牛祉霏.变电站设备巡检机器人系统设计方案的研究与应用[D]. 华北电力大学,2016.
[9] 崔彦彬,刘欢.变电站智能巡检机器人系统的设计[J]. 现代制造技术与装备,2014(04):1-3.
[10] 周立辉,张永生,孙勇,梁涛,鲁守银.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011,35(19):85-88+96. 



共0条 [查看全部] 网友评论