



摘 要:为了加强电力电子变流技术基础的教学工作,针对教学中的难点和重点,即普通单向晶闸管的电气参数选型和驱动电路问题进行了归纳和分析总结,对晶闸管额定电压和额定电流的选择原理进行详细描述,结合基于ORCAD和SIMULINK仿真平台对同步信号为锯齿波的晶闸管驱动电路的工作原理进行了详细描述。所做工作有助于学生清晰和全面掌握晶闸管参数选型和驱动的基本知识,加深对变换器相控概念的理解。
关键词:晶闸管;额定电压;额定电流;电流型驱动器;相位控制
Abstract: In order to strengthen the teaching work of“The fundamentals of Power Electronics Conversion Technologies”, in this paper, the electrical parameters selection and drive problem of the commonly-used unidirectional thyristor are summarized and analyzed, which are the most difficult and important problems in teaching. The selection principle of thyristor rated current is described in detail. Based on ORCAD and MATLAB/SIMULINK simulation platforms, the working principle of the standard thyristor drive circuit with Sawtooth-wave based synchronous signal is described in detail. The work is helpful for students to master the knowledge of thyristor parameters selection and driver clearly and comprehensively, and to deepen the understanding of the concept of phase control.
Keywords: Thyristor; Rated voltage; Rated current; Current Mode Driving Circuit; Phase control
【中图分类号】TN341 【文献标识码】B 【文章编号】1561-0330(2019)01-0000-00
1 引言
“电力电子变流技术基础”是电气工程专业的基础课程[1-11],涉及三大领域,包括电力学、电子学和控制理论。电力电子变换器包括不控变换器、相控变换器、PWM斩控变换器以及谐振变换器。对于相控变换器,如相控交流调压电路、相控整流电路以及周波变换器,晶闸管均作为主要的功率开关。晶闸管能承受电压和电流容量最高,工作可靠,广泛地应用在家用电器、大功率电力工业、电力传动等行业,即使在全控器件盛行时代仍然发挥着巨大作用。作为工科大学三年级第一学期的学生,由于对晶闸管有关内容缺乏理解和缺乏实际经验,学生们普遍对晶闸管主要电气参数选型和驱动电路(触发电路)原理感觉到非常困难。本文给出晶闸管额定电压和额定电流的确定原则,尤其对额定电流确定方法给予较多的描述;结合ORCAD和MATLAB/SIMULINK仿真平台,建立晶闸管标准驱动电路,结合教材对晶闸管驱动电路进行功能分隔和概括性描述,对全面理解握不同相控变换器中晶闸管驱动知识打下基础。
2 晶闸管参数确定
2.1 晶闸管基本知识
晶闸管(Thyristor),名晶体闸流管(thyratron),又名可控硅整流器(Silicon Controlled Rectifier—SCR)。1956年,晶闸管首先诞生在美国贝尔实验室。1957年,美国通用电气公司开发出首只晶闸管产品。1958年以后,逐渐实现商业化。晶闸管的诞生开辟电力电子技术迅速发展和广泛应用的崭新时代。晶闸管为三端器件,包括门极、阳极和阴极,内部为PNPN四层半导体物理结构,构成具有电流正反馈作用的PNP与NPN共基极复合晶体三极管,因此门极只负责开通晶闸管,不能用于关断晶闸管,因而称为半控器件。
晶闸管的开通条件可以总结为:(1)阳极与阴极所在支路施加有足够高的正向电压;(2)门极通入合适的正驱动电流。晶闸管的导通标志为阳极电流大于擎住电流。晶闸管的关断条件可以总结为:(1)阳极与阴极所在支路施加有足够高的反向电压;(2)门极通入合适的负驱动电流(对于门极可关断晶闸管GTO)。晶闸管的关断标志为阳极电流低于维持电流。
晶闸管的伏安特性如图1所示。图1中,晶闸管工作状态包括:①正向导通区,晶闸管已经进入通态;②负阻区,晶闸管正向电压较高但是正向漏电流变低,电阻呈现负数;③正向阻断区,晶闸管正向施加电压,正向漏电流有所增加;④反向阻断区,晶闸管反向施加电压,反向漏电流有所增加;⑤反向击穿区,晶闸管反向施加电压过大,反向电流剧增,进入雪崩击穿状态。
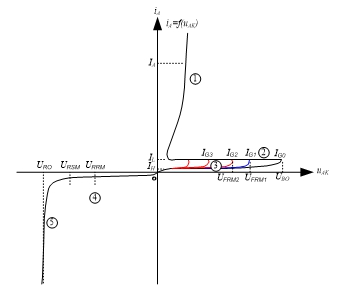
图1 晶闸管的伏安特性
2.2 晶闸管额定参数
额定电压UR:一个晶闸管的耐压是决定于工厂设计和测试结果。生产厂商在制作晶闸管时,取UDRM和URRM中较小者并向下取整对应的产品标称值,如600V和1200V,作为额定电压[1-2]。
在功率电路中,晶闸管用于处理强电,选择器件耐压要留有一定裕量。为追求最大可靠性,考虑正常条件下、极限条件下工作,晶闸管的额定电压应该选择供电电源电压最大峰值的2-3倍。具体选择多大耐压的晶闸管,完全决定于应用电路,许多教材中关于这方面的描述不准确不清晰。
额定电流IR:在环境温度40℃和额定冷却状态下,稳定结温不超过额定结温时所允许流过的最大工频正弦半波电流在一个电源周期中的通态电流平均值。同样地,晶闸管额定电流是决定于工厂设计和测试结果。生产厂商在制作晶闸管时,按照上述标准测试条件,获得额定电流。
晶闸管与功率二极管一样,这是按照发热效应等价或电流有效值不变原则来定义的。在实际应用电路选型时,为做到最大安全性,晶闸管耐流值应该选择为实际电路中晶闸管流过“最大工频正弦半波电流在一个电源周期中的通态电流平均值”的1.5-2倍。
额定电流定义的“中心词”为“…电流平均值”,而不是“…电流有效值值”,因此二者之间就需要折算,使得情况变得比较复杂,不容易理解和掌握。为了进一步理解额定电流的含义,给出“工频正弦半波电流波形”、任意“实际电流波形”之间的电流有效值等价关系图,不失一般性,如图2所示。
 。
。

iA1的作用只是提供电流波形和对应的波形系数,与电流幅值、电流有效值和电流平均值无关。
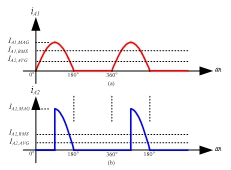
图2 晶闸管电流基准波形与任意波形
iA2应为实际工作中晶闸管流过的任意波形最大电流。因此应该首先计算iA2的有效值,然后令该有效值与iA1有效值相等,接着计算iA1电流平均值,iA1电流平均值即为所用晶闸管额定电流,表达式如下:

因此可根据上式中的已知量计算未知量。
3 晶闸管驱动电路
3.1 驱动电路分类
通常相控变换器采用的驱动电路有三种类型:
类型1:支持输出单窄脉冲的同步信号为锯齿波的驱动电路(触发电路)如图3所示[1-2],图3适合驱动三相半波相控整流电路和其它需要单独驱动单管或多管相控变换器,如单相相控整流电路、单相相控交流调压电路和三相半波相控整流电路,对应产品包括晶闸管投切电容(Thyristor Switched Capacitor,TSC)、晶闸管投切电感(Thyristor Controlled Reactor,TCR)等。
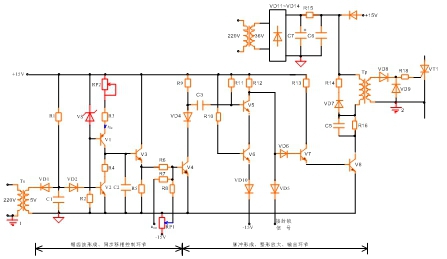 图3 输出单窄脉冲的晶闸管驱动电路
图3 输出单窄脉冲的晶闸管驱动电路
类型2:支持输出同步单窄脉冲的同步信号为锯齿波的驱动电路(触发电路)如图4所示[1-2],图4中包含两组相同的驱动变压器次级电路,适合驱动单相全桥相控整流电路。
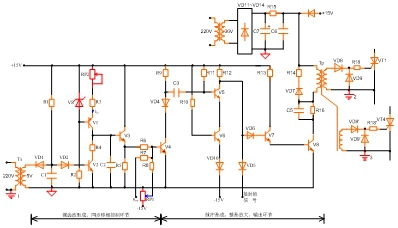
图4 输出同步单窄脉冲的晶闸管驱动电路
类型3:支持输出异步双窄脉冲的同步信号为锯齿波的驱动电路如图5所示[1-2],图5中包含X与Y端子,适合驱动三相全桥相控整流电路和周波变换器。
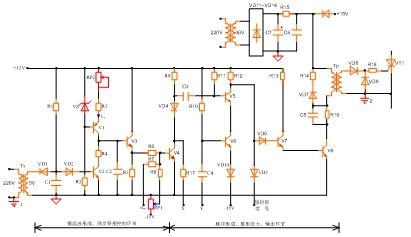 图5 输出异步双窄脉冲的晶闸管驱动电路
图5 输出异步双窄脉冲的晶闸管驱动电路
3.2 驱动电路工作原理
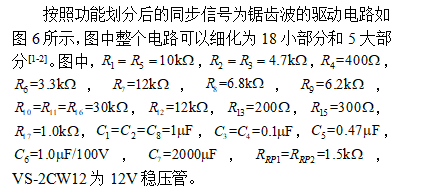
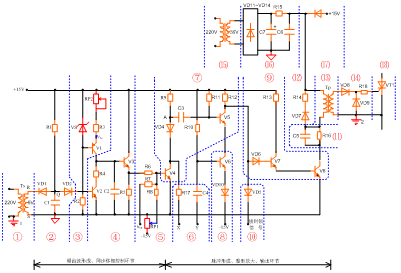
图6 同步信号为锯齿波的驱动电路功能划分
第1部分:同步环节,对应图6中①和②,负责检测电源相电压过零信号,提供相位控制用的同步参考信号,同步变压器次级电压波形如图7(a)所示,电容C1电压波形如图7(b)所示。在网压正负半周中,+15V电源通过R1向C1正向充电,在电源负半周中,交流电源向C1反向充电。在上述电路结构和参数配置下,C1充电与放电时间为240°,其后120°区间中,VD2与V2正偏置导通,C1电压被钳位在约为两个PN结压降(1.4V)。鉴于C2电压是在网压负半周峰值以后才开始上升,到达1.4V时V2才开始导通,V2导通后才会引起后级C2放电过程,因此R1与C1支路时间常数R1C1决定锯齿波上升时间,即锯齿波宽度。由于前后30°范围内锯齿波质量较差,因而取中间段,因此锯齿波宽度一般设置为240°。
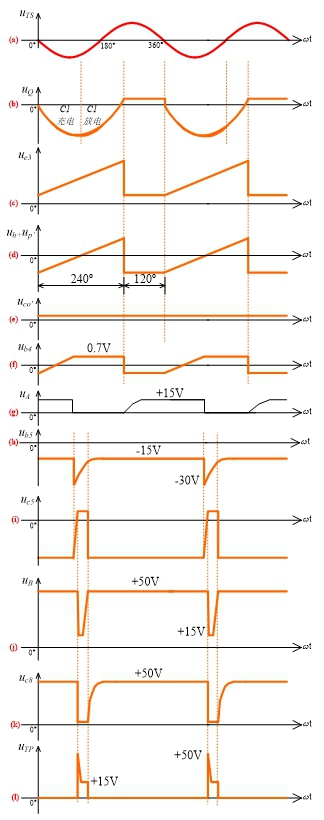
图7 晶闸管驱动脉冲波形
第2部分:锯齿波与移相环节,对应图6中的③、④和⑤,负责产生恒定电流源,通过电容充放电形成锯齿波。通过控制电位器移相,确定最终驱动脉冲的控制角。(1)锯齿波形成:RP2、R3、V1与VS构成恒流源,给C2充电,C2电压线性上升。R4、V2构成放电电路,在C1正电压作用下导通时,V2导通放电,C2放电,电压复位。在一个电源周期内,C2充电与放电过程形成宽度240°的锯齿波。V3形成射极跟随器,通过R5输出该锯齿波序列,如图7(c)所示;(2)移相形成:锯齿波电压、直流电压uco和直流偏移电压up分别通过电阻R6、R7和R8连接V4基极,共同决定锯齿波上下平移功能。锯齿波电压、uco和up单独作用时,在V4基极产生的电压分别为uh、uco'和up'。,如图7(d)、(e)、(f)和(g)所示,当V4基极获得0.7V电压时,V4导通,此后V4基极电压被钳位在0.7V,相当于锯齿波前后发生相移。up目的在于控制ucp=0时驱动脉冲的初始相位,通过调节up使在V4起始导通时刻刚好处于锯齿波中间,相应于控制角为a=90°。uco目的:uco>0, V4起始导通时刻前移,控制角a<90°,三相全桥相控整流电路处于整流状态。uco<0,V4起始导通时刻后移,控制角a>90°,三相全桥相控整流电路处于逆变状态。
第3部分:双窄脉冲形成环节,对应图6中的⑥,端子X连接“序号”低的相邻晶闸管驱动器的Y端,端子Y连接“序号”高的相邻晶闸管驱动器的X端。六只晶闸管VT1~VT6驱动器的X端与Y端依次相连,构成一个完整三相全桥整流电路相差60°的双窄触发逻辑,如图9所示。在三相全桥相控整流电路中,晶闸管导通顺序按照编号顺序,即VT1—VT2—VT3—VT4—VT5—VT6—VT1,相邻器件起始触发脉冲相差为60°,两个相邻器件同时导通60°,如图7和图8所示。
第4部分:脉冲形成与放大环节,对应图6中的⑦、⑧、⑨和⑩,负责形成合适宽度的原始电压驱动脉冲,通过两级达林顿图腾柱结构,对驱动脉冲进行功率放大。当V4导通时,uA=0.3V,V5基极电压短时下降,然后上升,鉴于VD10阴极连接-15V,V5短时截止,V5集电极发出短时高电平,V7和V8短时导通。当V4截止时,C3放电,uA逐渐上升至+15V,V5基极电压恢复到+15V,V5导通,V5集电极发出低电平,V7和V8截止,如图7(g)、(h)和(i)所示。如果V5、V6任意出现截止,则V7和V8导通。当V8导通时,+15V电压通过变压器Tp初级、C5与R16并联支路、V8形成冲击电流,变压器次级产生尖峰电压,形成几倍于额定驱动电流的电流尖峰。R14与VD7构成续流支路,用于驱动变压器磁路复位。VD5阴极用于不工作或异常时连接低电平,封锁最终驱动脉冲。
第5部分:强触发环节,对应图6中的⑾、⑿、⒀、⒁、⒂、⒃与⒄,主要作用:C6放电形成5倍额定驱动电流的电流尖峰,+15V电源供电形成额定驱动电流,最终形成接近标准的强触发电流脉冲。
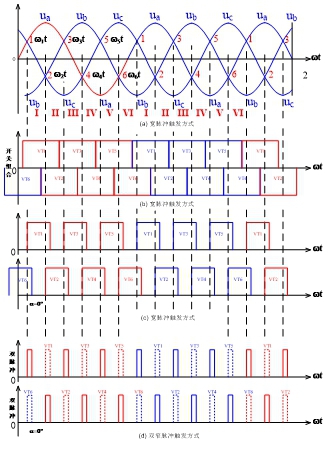
图8 三相全桥相控整流电路驱动脉冲时序
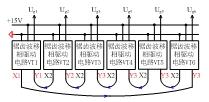
图9 三相全桥相控整流电路驱动脉冲关系
3.3 驱动电路仿真分析
采用图6的电路结构和电气参数建立ORCAD和SIMULINK的仿真平台,可以完全地实现同步信号为锯齿波的晶闸管驱动电路,可以测量各点电压和线路电流波形,观察每一电量的数量和相互之间的相位关系。ORCAD为电路级仿真软件,可以选择合适的元器件和参数,建立准确的驱动电路,如图10所示。SIMULINK为系统级仿真软件,不能采用SimPowerSytems库,而采用SimElectronics库,建立准确的驱动电路,而且信号的输入与输出需要与Simulink库中的若干子库建立转换关系,包括PS-Simulink Converter与Simulink-PS Converter,而且需要采用Solver Configuration定义解算器,不再需要SimPowerSytems的Powergi去定义simulink and configuration options 和Analysis tools,如图11所示。采用两种仿真软件,可以获得如图7所示的晶闸管驱动电路的各点电压和各线路电流波形。
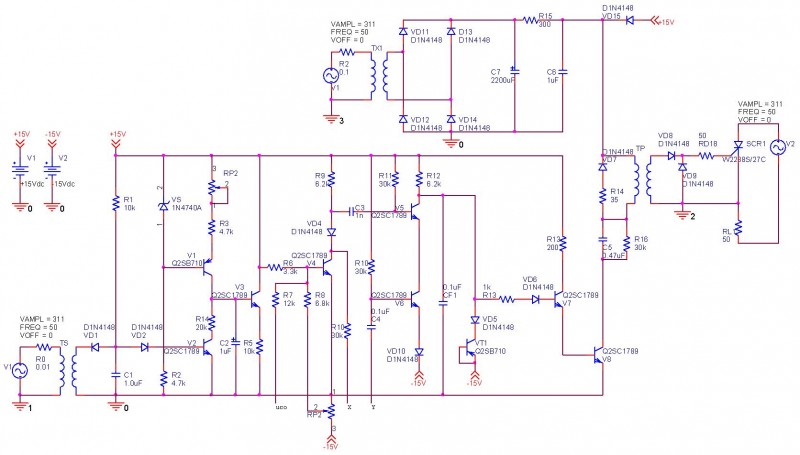
图10 基于ORCAD同步信号为锯齿波的晶闸管驱动电路
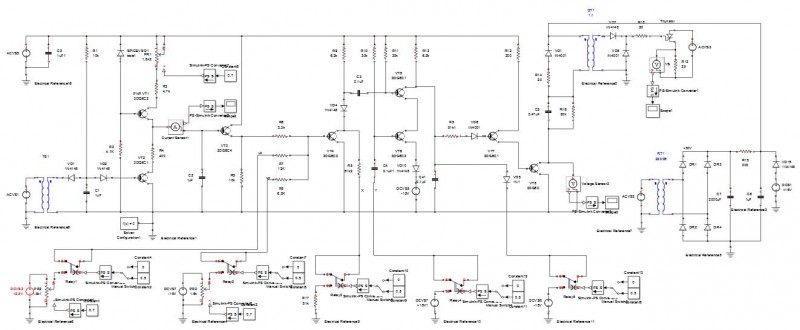
图11 基于Simulink SimElectronics同步信号为锯齿波的晶闸管驱动电路
4 结论
在描述晶闸管基本知识后,分析了晶闸管电气参数的选型原理,详细讲述了同步信号为锯齿波的晶闸管驱动电路的功能划分和工作原理,并给出了基于ORCAD和SIMULINK SimElectronics的仿真平台。上述工作对理顺思路和加深理解晶闸管参数选型和驱动原理起到了重要作用,克服了教材中概念模糊的问题,为学生课堂学习、实验验证提供了良好思路和自学基础。
参考文献:
[1]金如麟, 谭茀娃. 电力电子技术基础[M]. 上海:上海交通大学出版社,2001年.
[2]黄俊, 王兆安. 电力电子变流技术[M]. 北京:机械工业出版社.
[3]张占松, 蔡宣三. 开关电源原理与设计[M]. 北京:电子工业出版社, 1998年7月.
[4]Erickson, Robert W. Fundamentals of Power Electronics [M]. Second Edition. Secaucus, NJ, USA. Kluwer Academic Publishers, 2000.
[5]Ned Mohan, Tore M. Undeland, William P. Robbins. Power Electronics Converters: Applications and design [M]. John Wiley @Sons INC.
[6]B. R. Pelly 著, 杨启元 等译. 可控硅相控变流器及变频器(Thyristor Phase-controlled Converters and Cycloconverter)[M]. 北京: 冶金工业出版社, 1981年8月第一版.
[7]L. Gyugyi, B.R. Pelly 著, 王孝祥 等译. 静止功率变频器 (Static Power Frequency Changers)[M]. 北京:冶金工业出版社,1988年9月第一版.
[8]Marian P. Kazmierkowski,R. Krishnan, Frede Blaabjerg. Control in Power Electronics- Selected Problems[M]. Academic Press. Elsevier Science (USA), 2002.
[9]Muhammad h. Rashid. Power Electronics: Circuits, Devices, and Applications[M]. Pearson Education Hall. 2004, Third edition.
[10]Robert W. Erickson, Dragan Maksimovic. Fundamentals of Power Electronics, Second edition电力电子基础[M]. USA: Kluwer Academic Publishers, 2000.
[11]莫汉(Mohan, N), 冯德兰德(Vandeland,T.), 罗宾斯(Robbins,W. P.). 电力电子学: 变换器、应用和设计(第3版 影印版)(Power Electronics Converters Applications and design.) [M]. 北京:高等教育出版社.
作作者简介:
侯侯孝涵(1996.8-) 男 上海交通大学电气工程系硕士研究生 研究方向为电力电子与电力传动






共0条 [查看全部] 网友评论