
关键词:STM32;无位置传感器控制;三段式起动
Abstract: Brushless DC motor (BLDC) is widely used in various fields because of its good controllability, speed regulation performance, energy consumption and maintenance convenience. This paper first introduces the mathematical model of Brushless DC motor, and analyzes the technology of sensorless three stage starting and zero crossing commutation. The zero crossing point is determined by using the back EMF information, and the commutation time of the motor is determined according to the zero crossing information. An improved brushless DC motor sensorless control method based on the back EMF information is proposed. A brushless DC motor control platform based on STM32 is designed. The experiment results show that the control scheme achieves the effect of Holzer sensor brushless DC motor control scheme.
key words: STM32; Sensorless control; Three stage starting
【中图分类号】TM33 【文献标识码】B 【文章编号】1561-0330(2019)01-0000-00
1 引言
无刷直流电机与直流有刷电机相比具有体积小、效率高、低干扰的优势。同时也具有直流有刷电机调速方便的优势,因其电机结构不包含电刷和换相器,有效的解决了直流有刷电机换相会产生火花的缺点。广泛应用于军用,民事,工业等各个方面。传统的无刷直流电机都包含霍尔传感器或编码器,大大增加了无刷直流电机的体积,使得电机的应用场合收到限制。因此对无刷直流电机无传感器控制策略的研究具有一定的实用意义。
本文采集反电动势信息来获得无刷直流电机的过零点信息,根据所获得的过零点信息对电机进行换相。因无刷直流电机在静止时采样不到反电动势信号,选择“三段式”启动作为无刷直流电机的起动算法。基于STM32搭建无刷直流电机无传感器控制平台,验证算法的可行性与实用性。
2 BLDC电机数学模型
无刷直流电机定子感应电动势为梯形波,绕组间的互感是非线性关系。所以直接利用电机原有的相变量来建立数学模型。假设定子齿槽的影响忽略不计,电枢反应对气隙磁通影响忽略不计,电机磁路不饱和,定子三相绕组完全对称且各参数为常数。
3 无刷直流电机控制
如图1所示为系统的结构框图。本文采用STM32主控芯片为系统的核心,起动算法为“三段式”起动算法,换相算法为“反电动势过零点法”。硬件电路主要包括:处理器模块,单电阻电流采样模块,电源模块,驱动电路和逆变电路模块,过压检测模块。
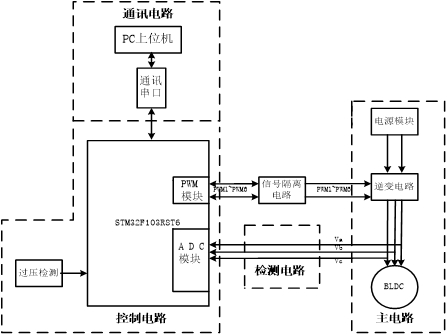
图1 无刷直流电机系统硬件框图
3.1 起动算法
本控制方案采样“三段式”起动算法,“三段式”起动算法分为:定位、开环加速、闭环切入三个步骤。如图2所示。
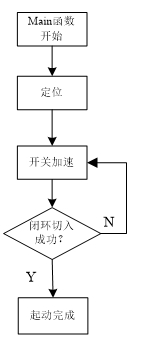
图2 直流无刷电机“三段式”起动
无刷直流电机处于静止状态时,无法获得电机的反电动势信息,需将电机转子强行定位在一个特定的位置。对电机的任意两相通电,使电机的定子磁场位置和转子位置一致,完成电机的定位。
“三段式”起动算法,定位步骤完成之后,以当前定位位置为初始位置对电机进行加速。对加速阶段本文使用恒压,逐步减少换相时间的方式。即对电机以一定的换相逻辑给以相同的占空比,逐步减少换向时间来对电机进行加速。
当电机加速到一定转速之后,可以获得稳定的反电动势信息,根据所获得的反电动势信息对电机进行闭环切入。切入过程中,可能由于同步信号之间存在相位差使得功率管通断时刻出现误差, 导致切入过程失败。本文在电机开环加速的过程中实时检测反电动势信息,在检测到过零点信号之后,延迟一个电角度对电机进行闭环切入控制。
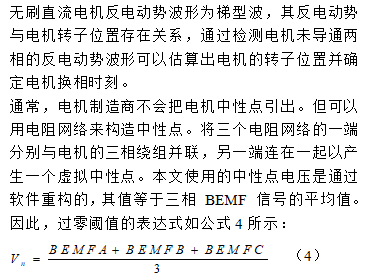
3.2 反电动势过零点换相
式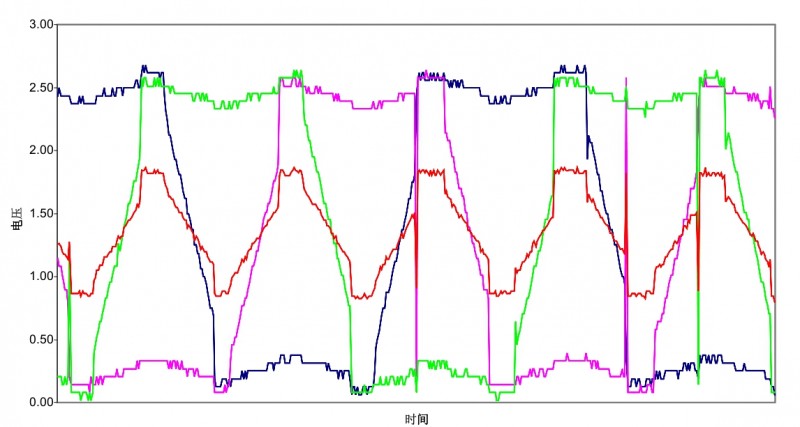
图3 BEMF 信号与虚 拟中性点的对比曲线
蓝色为A相反电动势,紫色为B相反电动势,绿色为C相反电动势,红色为软件重构的中性点。当中性点与ABC三相反电动势相交的时刻为反电动势过零点时刻,根据此信息可以对电机进行换相。
4 反电动势采样电路设计
本文采样如图4所示的反电动势采样电路,可以精确的采样到反电动势信息,减少延迟时间。
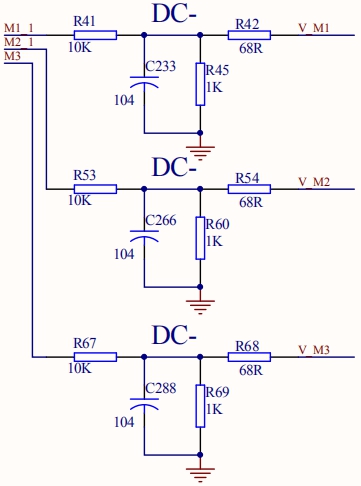
图4 反电动势采样电路
本文功率逆变模块采用IR公司的IR540 MOSFET,因主控电路输出的PWM不足以直接驱动MOSFET导通与关断,故需增加一级驱动电路。驱动电路以IR2136驱动芯片为核心,原理图如图5所示。
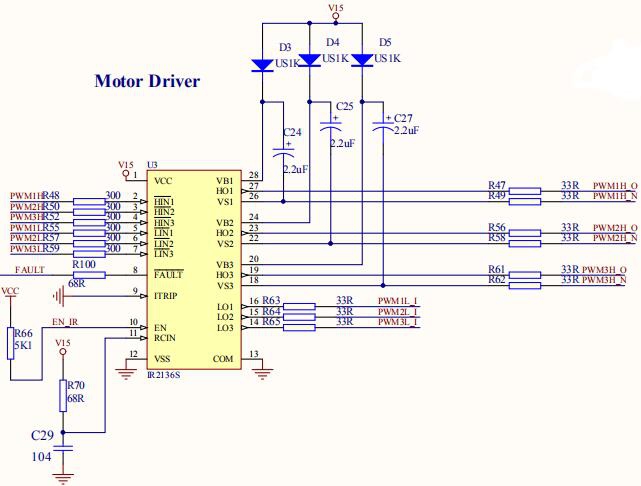
图5 驱动电路
6 实验验证
实验用直流无刷电机参数如附表所示。
附表 实验电机参数
|
参数 |
数值 |
|
额定功率/W |
400 |
|
额定电压/V |
220 |
|
额定电流/A |
2.6 |
|
额定转矩/N.m |
1.3 |
|
额定转速/(r/min) |
3000 |
|
定子电阻/ |
2.3 |
|
d、q轴电感/mH |
7.34 |
|
极对数/对 |
4 |
如图6所示,为本文所设计的基于STM32的直流无刷电机控制平台。
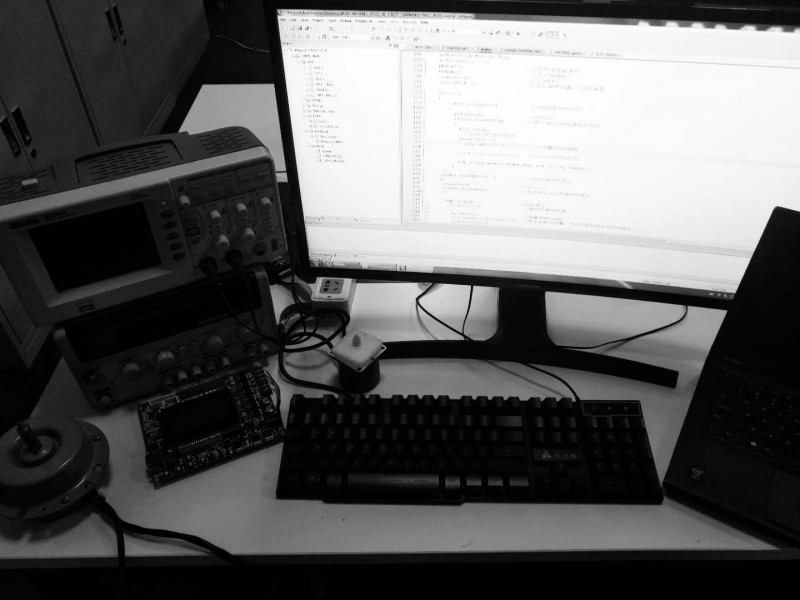
图6 控制平台
图7、图8分别为100%占空比和50%占空比下电机单相电压波形。从图中可知,由改进型反电动势过零点换相法所得电机单相端电压波形符合无刷直流电机磁场梯型分布特性。
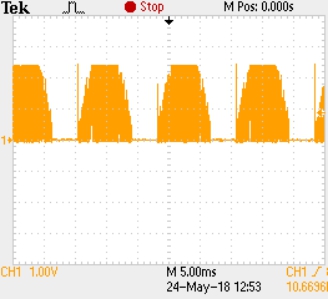
图7 50%占空比下三相端电压波形

图8 100%占空比下三相端电压波形
7 结论
实验结果表明,应用三段式起动方式与改反电动势过零点换相法的直流无刷电机无传感器控制算法能够达到带霍尔传感器控制的控制精度与效果。
参考文献:
[1]祝恒洋. 一种基于MSK4310的无刷直流电机控制系统设计[J]. 微电机,2016(5):81-84.
[2]谭建成. 永磁无刷直流电机技术[M]. 北京:机械工业出版,2010.
[3]祝恒洋. MSK4324及其在军用无刷直流电机控制系统中的应用[J]. 微电机,2016(7):68-72.




共0条 [查看全部] 网友评论