



关键词:雪龙2号;ACS6000变频器;直接转矩控制;无刷励磁同步电机
1 引言
电力推进船舶由推进电动机取代传统的柴油机来驱动螺旋桨转动,不仅具有良好的经济性、操纵性和安全性,而且噪声低、污染物排放少,具有广阔的应用前景[1-2]。同步电动机具有体积小、效率高和可靠性好等优点,在电力推进船舶中得到广泛应用。为了满足船船这种需要快速响应的大惯量运动系统,通常采用直接转矩控制。相较于矢量控制,直接转矩控制不仅可省去坐标变换,还能得到良好的转矩响应速度和较高的转矩控制精度[3-5]。
本文以雪龙2号极地考察船为例,介绍了ABB公司Azipod®无齿轮回转型电力推进系统和ACS6000中压变频器。并分析直接转矩控制的原理及特点,给出了推进电机的负载阶跃动态速度响应的实验分析,验证了直接转矩控制具有响应速度快、速度控制精度高的特点。
2 雪龙2号极地考察船
雪龙2号极地考察船是多功能科考破冰船,设计船长122.5米,船宽22.3米,船深11.8米,吃水深度7.85米,排水量为13990吨级,具有国际领先的双向破冰能力。可在两极水域混有陈冰的次年海冰中航行作业,艏向和艉向航行能破的水平冰厚度均不低于1.5米,连续破冰速度2~3节。其装有技术先进的考察装备和全球定位系统,具备2万海里续航力,几乎可以绕地球航行一圈。
雪龙2号配有2套独立的24脉冲型电推驱动系统。每套推进驱动系统应由2台6600V中压推进变压器、1台励磁变压器、1套推进辅助配电板400V、1套ABB ACS6000中压推进变频器、1台7.5MW主推进吊舱电机和1套制动电阻组成。电气推进系统的过载转矩特性设计能满足破冰能力的需要。系统对低压电网所产生的谐波畸变能满足船级社的最低要求。并且系统配置2套UPS供推进变频器的控制系统,并且作为中压配电板的控制系统的备用电源。蓄电池的容量应满足连续供电时间不小于30分钟的要求。
3 ABB Azipod®无齿轮回转型电力推进系统
ABB提供的Azipod®是一种无齿轮回转型电力推进系统,能帮助雪龙2号极地考察船全面提升操作灵活性、节能性和运营效率。通过配备Azipod®电力推进系统,破冰船能够实现原地360°回转,使船员可以选择操纵船尾或船头进行破冰,大大提高了船舶的可操作性。同时,该系统还帮助破冰船大幅提高能源效率,最多可节约20%的燃油。雪龙2号采用的推进吊舱型号为Azipod VI,属于无刷励磁同步电机(synchronize motor with brushless excitation)。
在整个电力推进控制系统中,核心部分是ABB ACS6000中压推进变频器。ACS6000变速传动的功率范围从3MW至27MW,输出频率从0-75Hz(双重化传动可达250Hz)广泛运用于船舶领域和工业领域的中压传动系统中。ACS6000能与7.5MW额定功率的推进电动机相匹配,并且额定功率下效率能够达到98.5%。
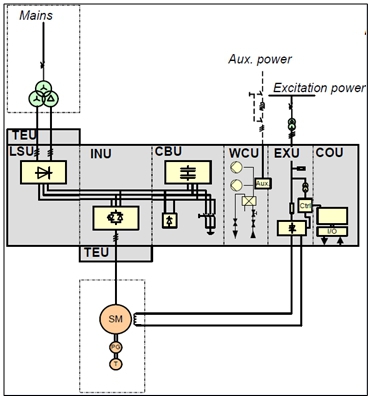
(1——LSU二极管供电单元;2——INU逆变单元;3——CBU电容组单元;4——EXU励磁电源;5——COU控制单元;6——WCU水冷单元;7——TEU终端单元)
图1 ACS6000单电机驱动电力系统
ACS6000是用来驱动同步电机的自整流电压源型逆变器的变频器。如图1所示,包括二极管整流桥在内的电源单元可在整个速度范围内提供功率因素高达0.95的持续功率。变频器采用的IGCT(集成门极换流晶闸管)电力半导体在主电路中无需保险丝。变频器整个布置中还包括了刹车斩波器单元,与刹车电阻一起工作。当需要推进吊舱从一个方向到相反方向运行时,由于船舶惯性,需要较高的刹车容量。电机控制基于直接转矩控制技术可优化转矩和速度性能。
ACS6000中压推进变频器采用直接转矩控制,相比市场上其他品牌变频器有着突出的特性:精确的静态速度和转矩控制、无超调的高动态响应时间和平滑的输出电流波形实现最小的转矩纹波。
4 直接转矩控制技术
在交流调速技术领域,矢量控制一度占据着垄断地位,直到直接转矩控制(DTC)的出现,直接转矩控制操控简单、响应速度快。这种控制算法最初是日本学者Takahashi和德国教授Depenbrock提出的,他们虽然使用的推导过程不同,但最终得到的结果几乎相同。到了1997年,L.Zhong与M.F.Rahman等科学家则将这种算法运用到电机的控制中,得到的结果十分有效的控制了电机的转矩。
如图2所示的永磁同步电机直接转矩控制原理图。直接转矩控制通过空间矢量和定子磁链矢量的结合,来测定永磁同步电机定子的电压值以及电流值,然后借助3/2坐标转换把三相值转换为α-β两相坐标系内,之后再使用电磁转矩观测器和定子磁链观测器将两相静止坐标系内的电压值和电流值进行计算整理,得到定子磁链Ψs、电磁转矩Te的值以及磁链所处扇区N,将磁链Ψs和转矩Te与原先的给定值Ψs*和Te*进行做差运算,之后将得到的差值通过调节器,再结合定子磁链矢量当前所属的扇区,系统将会调用起始的开关状态选择表,最终确定正确的开关状态Sabc,并通过控制逆变器开关器件来控制器通断。使得逆变器发出合适的控制矢量来控制运行电动机,从而实现了直接转矩控制算法,可以直接控制电动机定子磁链和电磁转矩。
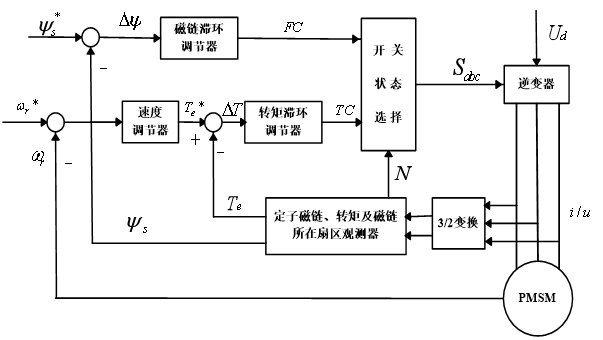
图2 典型直接转矩控制的原理框图
如图3所示ACS6000变频器的直接转矩控制原理框图,雪龙2号的推进吊舱为无刷励磁同步电机,在控制上存在三个自由度,分别来自对定子电流的直轴分量、交轴分量和励磁电流的控制。ACS6000控制方案中将三相电流、母线电压、励磁电流、开关位置、实际速度和位置反馈到控制系统,经过电机模型的转换,再通过转矩和磁通比较器运算后控制开关逻辑。
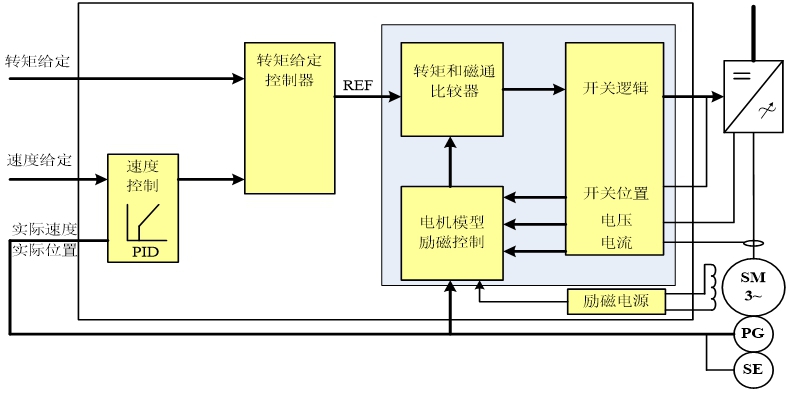 图3 ACS6000的无刷励磁同步电机直接转矩控制原理框图
图3 ACS6000的无刷励磁同步电机直接转矩控制原理框图
5 应用试验
以雪龙2号的推进系统为例,用ACS6000变频器控制无刷励磁同步电机进行实验。通过负载阶跃应用试验研究直接转矩控制的动态速度响应。
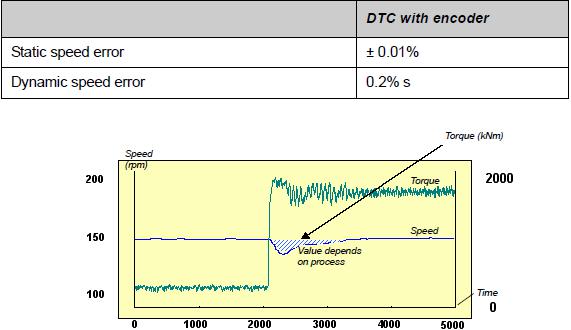
图4 动态速度响应
如图4所示(图中时间轴单位为ms),在转速为150rpm时,静态速度误差为±0.01%。加入负载阶跃后,动态速度误差为0.2%,进入稳态的时间约1.5s。可见在直接转矩控制下,推进系统有着快速的动态速度响应和较小的动态速度误差。
6 结论
本文以雪龙2号极地科考船的电力推进系统为例,用ABB公司ACS6000中压变频器和直接转矩控制方法进行实验,实验得出:电机动态转矩的响应时间很短,推进电机的响应速度快且平稳,在转矩突变的情况下仍能快速响应,系统具有良好的动态响应能力和抗干扰能力。直接转矩控制能满足船舶这种需快速响应的大惯量运动系统的要求。
.






共0条 [查看全部] 网友评论