



关键词:搬运机器人;自动化;PLC
1 引言
工业机器人是目前信息时代的新产业,其为目前的工业自动化生产和先进制造提供了极其重要的技术源头,其在扩大企业生产和促进社会发展等方面所起到的作用越来越重要。在全世界各个工业发达的国家中,各类型的工业机器人已广泛应用于化工、食品加工与包装、物流、机械制造等很多领域中,并快速地向其他领域不断延伸、发展。目前作为现代企业生产过程中不可被代替的重要手段与不可或缺的自动化工业装备,工业机器人己经开始变革了整个社会的生产、生活方式和整个人类的工业生产方式[1]。在中国,一直以来工业机器人主要运用在汽车、电子等行业。对于国有大型企业,民营、中小型企业而言,对于技术含量较高的工业机器人,生产成本相对昂贵的自动化装备。但目前,越来越多的企业充分认识到自动化工业装备的优势,可以极大程度上降低人力成本,且自动化工业装备可以增加自动化率,提高生产效益。其中工业机器人代理传统的人工作业,发展速度极快,同时在不同行业迅速铺开,并且收到越来越多企业的重视,不久便将成长为机器人产业市场中重要的组成部分。
2 控制系统软件关键技术
(1)CS模式
C/S结构的基本原则是将计算机应用任务分解成多个子任务,由多台计算机分别执行某一部分任务,合作完成,即遵循“功能分布”准则。客户端主要负责输入数据的计算及处理,处理结果的显示以及作为与用户连接的接口窗口功能;服务器端作为DBMC(数据库管理系统)。这种由客户按照需求发出服务请求、经过客户端的转化及预先处理,再由服务器提供最终服务的计算机任务处理方式,是一种比较完善的计算机应用模式[2]。C/S模式结构如图1所示。
??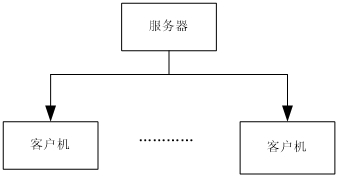
图1 C/S模式结构图
(2)面向对象的软件开发方式?
通过基于PLC的机器人搬运自动化系统的研究,了解、描述我们的客观世界和设计、搭建一些软件系统。面向对象方法是一种软件开发过程中应用性很广的方法,他的指导思想是面向对象的思想,又叫OO(Object-Oriented)方法,是建立在“对象”概念基础上的方法学[3]。对象由特定的数据和一系列可允许的动作构成的一个整体,他和所描述的现实实物一般会有相互对应的关系,一个对象类可以确定一组含有一些相近的特性的对象,而对象的继承性则是对含有层次关系的类的特性和动作共享的方式。[4]
(3)伺服驱动技术
伺服系统是使物体的位置、方位、状态等输出被控量能够以一定的准确度跟随输入信号量(或给定值)的任意变化的自动控制系统,用来自动、连续、精确地跟随或复现某个过程的反馈控制系统,又称随动系统或自动跟踪系统。在很多情况下,伺服系统专指被控制量(系统的输出量)是机械位移或速度、加速度的反馈控制系统,其作用是使输出的机械位移(或转角)准确地跟踪输入的位移。??
3 机器人搬运自动控制系统设计
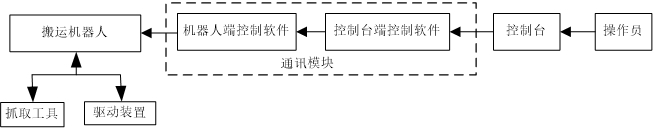
自动化控制系统软件总体结构模式采用C/S模式。控制系统软件设计分为两大部分,控制台控制系统软件设计及机器人端控制系统软件设计。总体结构如图2所示。
?  ? 图2 搬运机器人控制软件总体结构图
? 图2 搬运机器人控制软件总体结构图
搬运机器人端控制软件运行在搬运机器人上,可以对机器人上所携带的设备进行操作。控制台端软件运行在控制台上。机器人控制软件和控制台控制软件通过通讯模块进行互联。操作人员通过操作控制台端软件,从而操作机器人端可控制软件,进而操作搬运机器人[5]。生产线将生产完成的纸箱输送到纸箱抓取工位,由定位调整装置将其定位,系统根据纸箱的型号,更换对应的抓取工具,移动到抓取位置,抓取纸箱到码垛位置进行码垛,整垛码放完成后由垛箱输出传送线将垛箱输出到升降梯位置,机器人则到木拍放置架抓取木拍放置到码垛工位,然后重复抓取纸箱进行新垛的码放。
搬运机器人控制软件具备以下基本功能:完成与控制台软件系统通讯;接收控制台软件系统发送的命令,执行相应动作,并反馈执行结果;控制机器人的移动;控制工件抓取工具动作;采集抓取工具动作信号,并反馈给控制台[6]。
控制台端控制软件具备以下基本功能:完成与机器人软件系统通讯;接收操作员的操作并将操作转换为控制指令发送给机器人,接收机器人命令执行结果反馈,并将结果显示给操作员;完成操作员操作命令、传感器检测结果的显示;命令执行过程中错误的收集、显示、存储和管理[7]。通讯模块用来连接控制台和机器人,完成控制台端软件与机器人端软件的数据通信。
4 机器人搬运自动控制系统实现
主要完成对搬运机器人行走的控制,包括以下几个功能:设定机器人滑轨移动速度,控制机器人向前或者向后行走;能够指定机器人移动到三个定位位置,即初始原点、取件1位置、取件2位置;驱动机器人移动,采用电伺服电机驱动技术。行走模块流程如图3所示。
?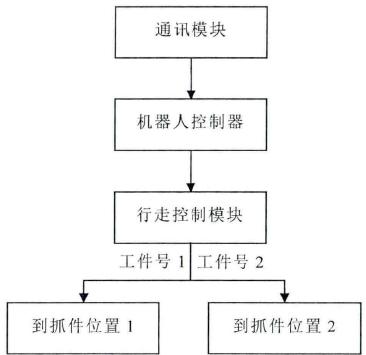
图3 行走模块流程图
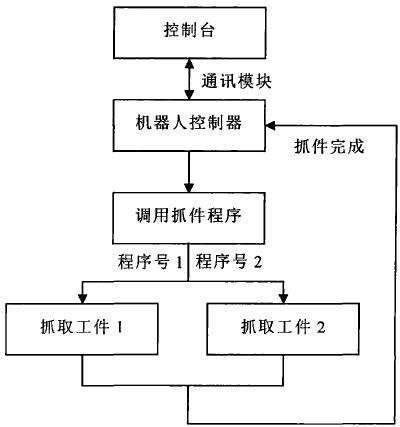
取件动作模块功能:机器人端接收到控制台发送过来的控制命令后,经过解释及编译调用相应的抓件程序,执行相关动作,执行完成后将结果反馈到控制台。取件动作模块流程图如图4所示。控制端发出机器人抓取工件控制命令包01001010001010,机器人端输出命令包01001011001100。
? ?
?
图4 取件模块流程图
放件动作模块功能:取件完成后,控制台发出放件允许信号给机器人,机器人调用相对应的放件程序将工件放置到指定地点,放件完成,机器人返回到初始位置,并反馈放件完成信号给控制台,准备下一个取件放件流程开始。其简要工作流程如图5所示。控制端发出机器人放件控制命令包01001010001110,机器人端输出命令包01001011010000。
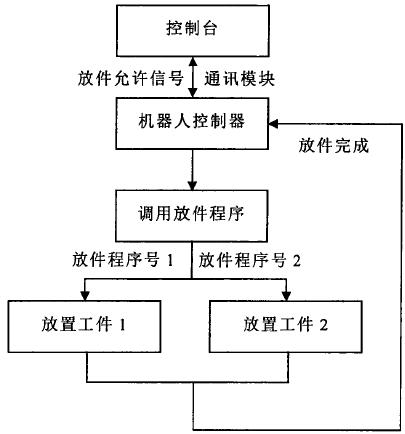
图5 放件模块流程图
5 结语
现代机器人的应用领域正在不断拓宽,未来机器人的发展趋势正在朝着专用化、模块化、可重构化方向发展,机器人的控制系统也将越来越灵活多变、更加多元化,应用PLC作为主控元器件对机器人运动进行控制,还有许多的问题需要解决,PLC在机器人开发中的开发应用还有很大的空间。本论文机器人研究的电气伺服驱动,具有精度高、转速性能好、适应性强、运行平稳、动态响应时间短、舒适性好等优点[8]。用PLC作为控制器,能够优化机器人控制系统。全部程序均采用模块化设计思想,不仅在设计时结构清晰,还易于检查和修改。
参考文献:
[1]潘桓,史佳超,王庆东. 基于工业机器人的多工位热电池粉料自动称量系统[J]. 上海电气技术,2018,11(03):16-20+28.
[2]王高亮,王辉辉,王强,孙晓红. 交叉足步行机器人设计[J]. 智能计算机与应用,2018,8(06):153-157.
[3]肖成军. 基于机器视觉与工业机器人的分拣技术研究[J]. 内燃机与配件,2018(20):214-215.
[4]何宁,赵彬,毛欣. 服务机器人导航与路径规划技术研究[J]. 机械设计与制造,2018(10):249-251+256.
[5]邵志明,吴杰,原昊,刘文涛,于胜男. 温室超低量智能施药机器人[J]. 农业开发与装备,2018(09):81+85.
[6]陆定超,陈嘉齐,卢琳,李金鹏,贾淳翔. 太阳能板自动清洗机器人[J]. 机电产品开发与创新,2018,31(05):17-18+85.
[7]龙卓群,雷日兴. 移动机器人全覆盖路径规划算法研究[J]. 自动化与仪器仪表,2018(09):15-17.
[8]王煜. 软体机器人技术发展路线探寻[J]. 机器人产业,2018(05):76-81.
作者简介:
潘光良(1994.10-),男,工学硕士,齐鲁工业大学(山东省科学院)电气工程与自动化学院,研究方向:工业测控网络技术。
通讯地址:山东省济南市长清区大学路3501号,邮编:250353,手机:13685313378,E-mail:1535173658@qq.com






共0条 [查看全部] 网友评论