


关键字:水果采摘;振动脱落;便捷式;适应性
1 研究背景
近年来,随着农林业产业结构化调整,林果生产已经成为很多地区经济发展和农民增收的支柱产业[1],随着种植面积的不断扩展,果园规模化发展和规范化管理的要求提出来新要求,机械自动化作业普及越来越重要。根据网络消息显示世界主要发达国家于二十世纪六十、七十年代基本实现了农业机械化,目前仅用少于全国5%的劳动力人口支撑了本国农业体系。随着我国“中国制造2025”的全面部署要求,以提高供给体系质量为方向,加快推进农机装备产业转型升级发展。农业机械新增量大幅提升,农机装备普及率实现了中等发达国家水平[2],但综合水平的提升不代表各个结构层次发展都均衡。作为我国农业主要支撑结构的林业水果采摘效率极为低下,造成人工成本高昂,安全隐患大。而市面上出现的部分机械装置一般为大型采摘机械,适用范围极为有限而且运作原理简单粗暴对果树损害较大。其实果林采收机械的研究我国仍然处于起步阶段,而为解决生长在高处果实难以采摘问题,我们设计提供一种利用振动脱落的采摘机械,工作的基本原理是以一定频率的激振力[3]作用于果实旁边的树枝上使得发生局部共振吸收能量达到一定量时导致果柄结合处发生脱落,同时果实具有一定质量(惯性)而在高频激振力作用果实状态不能及时改变导致果柄结合处产生交变载荷发生疲劳脱落,在双重作用下完成果实的收获。根据资料查阅,市场调研和专利检索,该设计在国内外水果采摘领域尚无应用。
2 设计方案
2.1 振动机构的结构
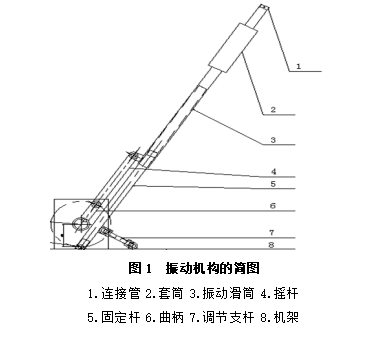
电机和振动箱固定在机架上。电机、振动箱和曲柄滑块机构之间都是通过相应的联轴器连接,曲柄滑块机构由活动铰链连接,振动滑筒上连接套筒。结构简图如图1所示。
2.2 振动机构的工作原理
利用电机的旋转带动曲柄6旋转,通过摇杆4带动振动滑筒3机构作直线往复的周期性循环运动。该种运动特性还具有不对称性(急回特性)则在固定杆5上产生的效果为一定频率的脉冲振动波,将头部用刚性外罩保护并作为传递运动的执行机构贴合到果实旁边的树枝上,使用之前首先设置采摘水果的种类,系统利用闭环反馈调节自动根据树枝粗细,密度等一系列参数调节为合适频率以达到共振吸能与疲劳破坏的目的,最终实现摘果功能。
2.3 电机的选型
为了达到振摇目的,需要使用一个合适的动力元件。选择合适电机具有对此设计具有重要的经济与现实意义。大、中、小型电动机主要区别,一般以电机轴中心高度和电机定子铁心外径等尺寸而定,如附表所示,根据功率适用范围,本设计采用小型电动机作为动力输出。
附表 电动机主要区别
|
名称 |
电机轴中心高度H/mm |
电机定子铁心外径D/mm |
电机机座号 |
|
大型 |
>630 |
>1000 |
16号以上者 |
|
中型 |
355-630 |
500-1000 |
11-16号 |
|
小型 |
89-315 |
100-500 |
10号以下者 |
|
微型 |
<71 |
<100 |
10号以下者 |
2.4 振动机构的分析
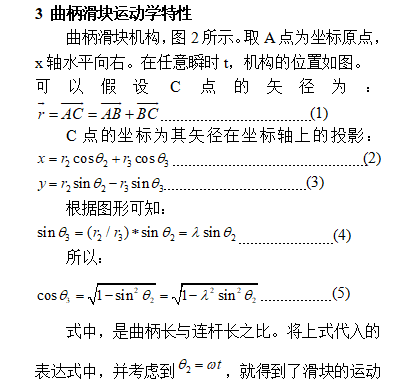
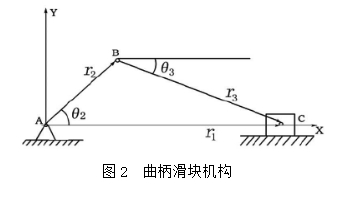
用于将曲柄的回转运动变换为滑块的往复直线运动。对曲柄滑块机构进行“运动校核”是当已知各构件尺寸参数、位置参数和原动件运动规律时,研究机构其余构件上各点的轨迹、位移、速度、加速度等,从而评价机构是否满足工作性能要求,机构是否发生运动干涉等[4]。曲柄滑块机构为铰链连接,运动副为低副各元件间为面接触,构成低副两元件的几何形状为拱形面,优点是加工制作简单,受力效果优良。因而在包括煤矿机械在内的各类机械中得到了广泛的应用。
4 曲柄滑块机构的振动与平衡
在一切有质量、构件质心有加速度或构件有角加速度的机械中,都存在着惯性力[5]。这将会增加额外动压力导致不仅将增加运动副中的摩擦力和构件的内应力,还导致磨损加剧、效率降低,产生大量噪音,也影响构件的强度。由此我们有必要进行一定的动平衡实验。一般消除动不平衡首先要进行静平衡调整,静平衡常用调节方法有:
(1)质量分配法:这种方法是通过在构件上加减质量的方法,例如加平衡重、掏孔等为了使机构的总质心位置始终处于机架上,机构的总质心不会随构件的运动而运动,从而达到振动力的完全平衡。
(2)平衡机构平衡法:即在机构上附加其它机构来平衡原机构的惯性作用。一般对相同的对称机构作为平衡方法。动平衡比静平衡则多了一项力矩平衡,要求在设计设计过程中尽量使旋转机构轴向方向的重心密度分布相同,而且根据机械原理上所得结论一般不太重要的动平衡可近似当静平衡处理。在实际生产中我们不能增加太多的冗余质量,而增对称机构可以降低原本单机构结构强度也可以消去静不平衡。因此我们采用平衡机构平衡的形式作为静平衡方案。
5 全文小结
基于振动的运动学特性,分析振动系统在外部简谐激振力的作用下产生的运动迹特征,进行振动式采收设备运动特性研究。在国内还属于一种创新性的做法,针对现有背景环境下可能有较大的发展前景,为林果采摘带来一定的突破。本装置工作时由单人即可完成作业,操作方便、工作可靠、效率高。在技术投入方面相比其他装置较为简单,十分适合于低成本、大量生产。
参考文献:
[1]成理鹏, 张继光, 李春雪. 一种水果采摘机的结构及功能设计[J]. 南方农机, 2018(1):34-34.
[2]陈明, 邹学平. 水果采摘、树枝修剪装置[J]. 中学科技, 2012(12):37-37.
[3]杨贞,王亚龙,韩冰. 牵引式果园采摘作业平台果实输送系统的研究设计[J]. 中国农机化学报, 2017, 38(7):24-28.
[4]刘晓敏. 基于气动复合弹性体柔性关节机械手研究[D]. 吉林大学, 2013
[5]孙桓,陈作模. 机械原理[M]. 北京:高等教育出版社,2013.
作者简介:
钱伟(1997-),男,湖北荆州人,本科,研究方向:车辆工程专业。
资助项目:“机电汽车”湖北省优势特色学科群开放基金资助项目(XKQ2018025)
E-mail:2857427825@qq.com; Tel:18827569691
邮编:441053;地址:湖北省襄阳市襄城区隆中路湖北文理学院新区25栋




共0条 [查看全部] 网友评论