



关键词:服务机器人;表情识别;支持向量机
1 引言
随着机器人技术的飞速发展,家用服务机器人将成为未来机器人开发的一个主要方向。作为服务机器人关键技术,和谐的多方式人机交互技术已逐渐成为国内外学者的研究课题。视觉检测信息量大,且能获得对环境最全面最深入的反应,是机器人最为重要的感知力。基于视觉的人机交互技术已逐渐成为服务机器人智能交互技术的重要基础。若将面部表情识别技术应用于服务机器人,使其具有理解和表达情感的能力,将从根本上改变人与机器人之间的关系,对提高服务机器人的智能化程度有着非常重大的意义[1]。
2 人脸表情识别方法介绍
面部表情分类环节主要是设计分类机制对表情进行识别,归入事先定义好的相应类别。常用的面部表情分类的方法一般可以归为以下四类:
(1)基于模板匹配的方法。这类方法为每一个要识别的表情建立一个模板,将待测表情与每种表情模板进行匹配,匹配度越高,则待测表情与某种表情越相似。这种方法计算量小,易于实现但识别率不高[2]。
(2)基于神经网络的方法。神经网络在解决非线性问题上有较大优势,因而在静态图像的面部表情识别中有着广泛的应用。其缺点在于,当识别很多无限制的混合表情时,对分类器的训练将会比较困难。
(3)基于概率模型的方法。这类方法估计表情图像的参数分布模型,分别计算被测表情属于每个类的概率。HMM是一个统计模型,适用于动态过程时间序列并具有强大的时序模式分类能力,理论上可以处理任意长度的时序,其缺点在于参数的选择较为复杂[3]。
(4)基于支持向量机的方法。SVM是在统计学习理论的基础上发展起来的一种分类方法,在解决小样本、非线性和高维问题上有很多优势。它将训练样本变换到高维空间中寻找最优分界面进行分类。结合LBP与Gabor变换提取表情特征,基于SVM分类器进行表情识别,实验结果显示对于相同的表情特征提取方法,SVM的识别成功率明显高于基于模板匹配的方法及PCA法。基于表情弹性图特征,对两种SVM多类分类策略及不同参数的核函数进行表情识别对比实验,证实了“一对一”多类分类策略的分类效果优于“一对多”策略,在JAFFE表情库上测试的最高成功率达到88.84%。在SPIDER表情库上对采用三种核函数的SVM进行表情识别实验,最高识别率为88.4%[4]。
3 人脸检测定位与跟踪
作为表情识别系统的重要组成部分之一,人脸检测定位的主要目的是从由机器人单目摄像头采集的图像序列中检测人脸区域,为后续中人脸跟踪算法提供目标[5]。为了满足表情识别系统的实时性要求,本文提出一种基于肤色与纹理特征混合模型的人脸特征检测定位方法,其流程如图1所示。

图1 人脸检测算法流程图
粒子滤波器(Particle Filter)是一种迭代贝叶斯估计方法,其实质是利用状态空间中一系列随机生成的样本,即粒子,近似表示目标状态传播的后验概率分布。粒子滤波适用于任何能用状态空间模型表示的非线性系统,以及传统卡尔曼滤波无法表示的非线性系统,精度可以逼进最优估计[6]。
人脸检测、定位与跟踪环节的最终目的是输出统一的人脸图像以便进行表情特征的提取和表情分类。由于从输入图像序列中检测跟踪到的人脸图像尺寸和灰度各异,提取的表情特征维数及无法统一,难以获得令人满意的识别效果。因此对人脸检测定位与跟踪环节输出的人脸图像进行规范化处理就显得尤为重要。规范化处理包括人脸图像尺寸归一化和灰度归一化。
4 基于SVM的表情识别
不同的支持向量机参数对分类性能影响很大。因此在使用支持向量机进行表情分类前,需要选择恰当的支持向量机参数。事实上,支持向量机中可供调整的参数只有少数几个,一般的核函数中的惩罚参数C的可控性较好[7]。核函数决定着特征空间的选择,惩罚参数C则影响着支持向量机的边缘,这两者对支持向量机的泛化能力起着决定性作用。支持向量机对分类问题的求解实质上是利用内积运算对相似性和相似程度进行估价,而非线性映射Φ的形式决定着内积,从而决定着支持向量机对相似性和相似程度的不同估价标准。非线性映射Φ总是以核函数的形式出现在运算中,因此,内积运算实质上直接依赖于核函数形式。一般来讲,核函数的选择具有较大的灵活性,由不同的核函数可生成不同的支持向量机,从而实现对分类性能的有效控制。不同核函数SVM表情分类器性能测试结果如附表所示。
附表 不同核函数SVM表情分类器性能测试结果
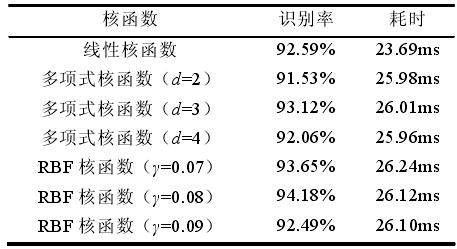
对其进行分析可得出如下结论:
(1)在分类器的实时性方面,采用线性核函数的SVM分类器耗时明显较少,这是因为其核函数形式相对简单,计算复杂度较小。采用多项式与RBF核函数的SVM分类器实时性无明显差别,分类耗时均高于线性核函数。
(2)在分类器的识别率方面,总体而言,采用RBF核函数的SVM分类器性能相对较好,其识别率略高于采用线性核函数和多项式核函数的SVM分类器,同时注意到,同种形式核函数的不同参数,对由其构造的SVM分类器的识别率有着显著的影响[8]。
人脸表情识别系统流程如图2所示。
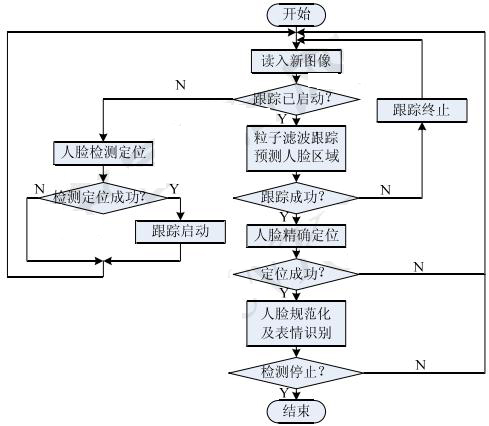
图2 人脸表情识别系统流程图
5 结语
针对基于机器人视觉的面部表情识别技术开展研究,本文开发出具有较高实时性及识别率的面部表情自动识别系统,基于支持向量机的方法。SVM是在统计学习理论的基础上发展起来的一种分类方法,在解决小样本、非线性和高维问题上有很多优势。它将训练样本变换到高维空间中寻找最优分界面进行分类。提出一种由粗到精的人脸检测定位方法。在基于肤色概率模型进行人脸粗定位的基础上,引入基于颜色、纹理特征混合模型的人脸特征定位方法,定位嘴唇及双眼。面部表情识别技术的研究对于服务机器人智能化多方式人机交互有着重要的意义。






共0条 [查看全部] 网友评论