



关键词:多旋翼无人机;虚拟监控仪器;状态显示;姿态调整;控制参数修正
1 引言
目前多旋翼无人机应用广泛,由于成本相对较低、无人员伤亡风险、生存能力强、机动性能好、使用方便等的优势,使得无人机在军事国防、航拍摄影、地质测量、线路巡视、森林巡查、植保、快递等领域迅速发展[1-2]。为了使飞行器相关专业学生学习多旋翼无人机飞控系统的设计方法,本文设计了一种虚拟监控设备,旨在实现对多旋翼无人机的状态显示、姿态调整和控制参数修正。
多旋翼无人机教学平台能够使学生学习无人机的结构组成、传感器和执行机构的工作原理、逻辑思路和控制算法设计等方面的专业知识,提高学生的专业应用能力,掌握迅速发展的科学技术。本文针对多旋翼无人机教学平台设计了监控装置——虚拟监控仪器。虚拟监控仪器设计简单、研发费用低、开发周期短[3]。虚拟监控仪器安装在目前广泛使用的智能手机上,操作简单易学,并且为学生研制无人机电子遥控器提供了设计思路和验证方案,从而提高了教学效率。
2 虚拟监控仪器总体设计方案
根据多旋翼无人机教学平台的监控需求,虚拟监控仪器需实现状态显示、姿态调整、控制参数修正和数据处理的功能。状态显示功能为实时监视多旋翼无人机的工作状态,包括俯仰角、偏航角、横滚角、机头方向、经纬度、高度、电池电量等状态量;姿态调整功能为实时调整多旋翼无人机的执行机构,包括前后运动、左右运动、横滚运动、油门调整等动作量;控制参数修正功能为结合PID控制算法修正相关参数,包括比例P参数、积分I参数、微分D参数等参数量[4-5]。数据处理功能为数据通信和数据存储,数据通信是虚拟监控仪器与多旋翼无人机飞行控制器之间的数据交互,数据存储是将接收的状态数据和发出的姿态数据和控制参数保存,以便性能分析和故障诊断时使用。虚拟监控仪器总体设计方案如图1所示。
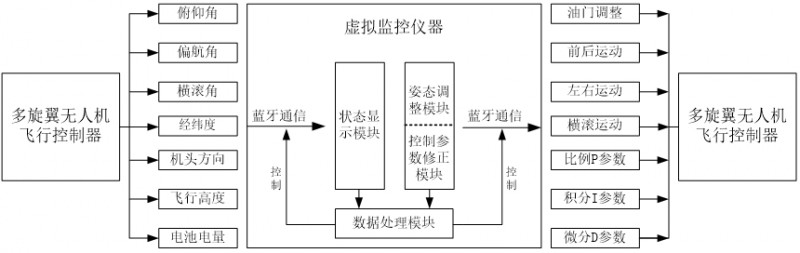
图1 虚拟监控仪器总体设计方案
3 状态显示模块设计
操作虚拟监控仪器的学生就是多旋翼无人机的飞行驾驶员,飞行驾驶员必须实时掌握多旋翼无人机的工作状态,才能做出正确的操作指令,以保障多旋翼无人机的正常工作。根据以上分析,状态显示模块是虚拟监控仪器的“感觉器官”,需要实时地将多旋翼无人机的工作状态展示出来。
3.1 状态显示模块需求分析
状态显示模块需要实时检测多旋翼无人机的工作状态。多旋翼无人机的工作状态有俯仰角、偏航角、横滚角、经纬度、机头方向、飞行高度和电池电量。根据以上分析,状态显示模块需要将以上数据实时显示,供飞行驾驶员掌握当前工作状态。本设计每1秒刷新一次显示数据,以满足实时要求。
3.2 状态显示模块程序设计
状态显示模块的界面主要使用User Interface栏中的label组件和Layout栏中的HorizontalArrangement组件。根据工作状态参数的数量及各参数的相关性设计界面,界面如图2所示。

图2 状态显示模块界面
根据需求分析,每1秒刷新一次显示数据,状态显示模块创建了一个定时器Clock1.Timer事件,将Clock1的TimerInterval属性修改为1000(即1秒)。每隔TimerInterval的时间间隔,就会运行Clock1.Timer事件中的代码。定时器调用接收子函数程序如图3所示。
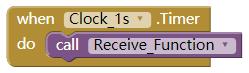
图3 定时器调用接收子函数程序
为了判断数据传输是否正确,多旋翼无人机飞行控制器发送的姿态角(俯仰角、偏航角、横滚角)、所处方位方向、电池电量等工作状态参数都有一个识别码。在状态显示模块程序中,为了接收飞行控制器发送的识别码,需要在状态显示模块程序中定义识别码变量。部分定义识别码变量程序如图4所示。
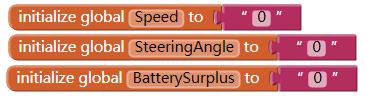
图4 部分定义识别码变量程序
状态显示模块程序中的识别码验证程序和工作状态参数显示程序全部定义在接收子函数中,设计中采用每验证一个识别码,将对应的参数显示。识别码错误,对应的参数显示框为“error”。某个识别码错误,不影响下一个识别码验证。部分识别码验证程序和状态参数显示程序如图5所示。
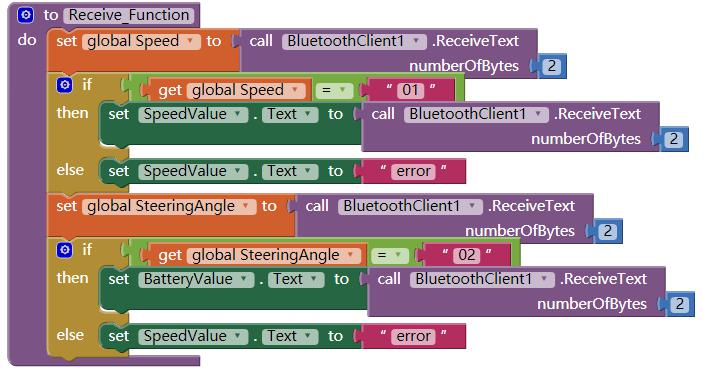
图5 部分识别码验证程序和状态参数显示程序
4 指令生成系统设计
指令生成系统由姿态操作模块和控制参数修正模块组成,操作虚拟监控仪器的飞行驾驶员需要及时调整多旋翼无人机的行为动作,避免多旋翼无人机撞到障碍物或坠机。多旋翼无人机必须按照虚拟监控仪器发出的有效指令进行动作,如果多旋翼无人机在执行姿态指令的过程中出现动作滞后、超调或稳定性差,需要修正相应的控制参数,使其实时有效地进行姿态调整。根据以上分析,姿态调整模块是虚拟监控仪器的“肢体器官”,控制参数修正模块是虚拟监控仪器的“免疫器官”,两者共同作用调整多旋翼机器人的姿态,保障其正常工作。
4.1 指令生成系统需求分析
指令生成系统需要实时效地调整多旋翼无人机的动作姿态。多旋翼无人机的动作姿态有油门大小、左右运动、前后运动、横滚运动。保障姿态执行到位的控制参数有比例P参数、积分I参数和微分D参数[6]。指令生成系统需要将以上姿态参数和控制参数发送给多旋翼无人机飞行控制器。每调整一个姿态参数或控制参数,虚拟监控仪器将所有姿态参数和控制参数发送一次,没有调整的参数值在发送过程中不发生变化。
4.2 指令生成系统程序设计
指令生成系统的界面分为姿态调整界面和控制参数修正界面,主要使用User Interface栏中的Button组件和Layout栏中的HorizontalArrangement组件。根据姿态参数和控制参数的数量及各参数的相关性设计界面,界面如图6所示。

图6 指令生成系统界面
根据需求分析,每调整一个姿态参数或控制参数,虚拟监控仪器将所有动作参数发送一次。姿态调整模块和控制参数修正模块程序中的全部参数发送程序定义在发送子函数中,部分参数发送程序如图7所示。当按下姿态调整模块或控制参数修正模块界面中的操作按钮时,首先相应的参数发生变化,然后调用发送子函数将所有参数发送一次,部分操作按钮程序如图8所示。
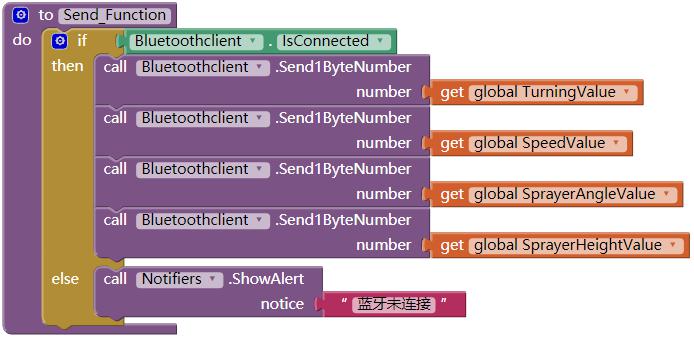
图7 部分参数发送程序
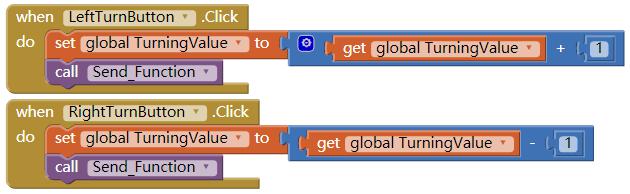
图8 部分操作按钮程序
5 数据处理模块设计
虚拟监控仪器与多旋翼无人机飞行控制器之间需要进行无线数据通信,才能实现状态显示、姿态调整和控制参数修正的功能。同时,为了便于故障诊断和性能分析,需要工作过程中产生的姿态数据、调整数据和控制数据。
5.1 数据处理模块需求分析
多旋翼无人机飞行控制器将传感器采集的工作状态参数通过无线设备发送给虚拟监控仪器的状态显示模块,虚拟监控仪器的姿态调整模块将姿态调整参数以及控制参数修正模块将算法修正参数通过无线设备发送给多旋翼无人机飞行控制器。由于虚拟监控仪器安装在广泛使用的智能手机上面,智能手机都配备蓝牙模块,所以采用蓝牙模块作为无线通信设备[7-8]。在发送和接收各种参数时,将这些参数保存下来,供故障诊断和性能分析时使用。
5.2 数据处理模块程序设计
数据处理模块程序分为两部分,一部分为蓝牙通信配置程序,另一部分为数据存储程序。蓝牙通信配置的界面由User Interface栏的ListPicker组件和Button组件构成。ListPicker组件实现搜索蓝牙设备的功能,并将搜到的蓝牙设备以列表形式展现,当选择某个蓝牙设备时,将此蓝牙设备的Mac地址赋给事先定义的变量,搜索蓝牙设备程序如图9所示。Button组件实现连接和断开蓝牙设备的功能,系统初始化后,初次点击Button组件,将连接蓝牙设备,再次点击将断开蓝牙设备,连接和断开蓝牙设备程序如图10所示。
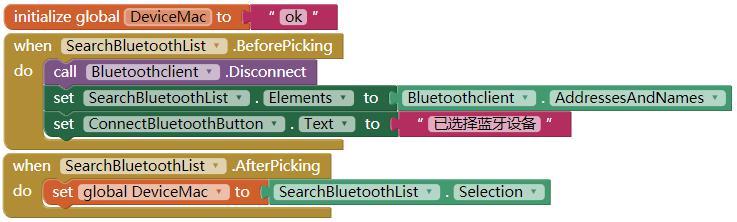
图9 搜索蓝牙设备程序
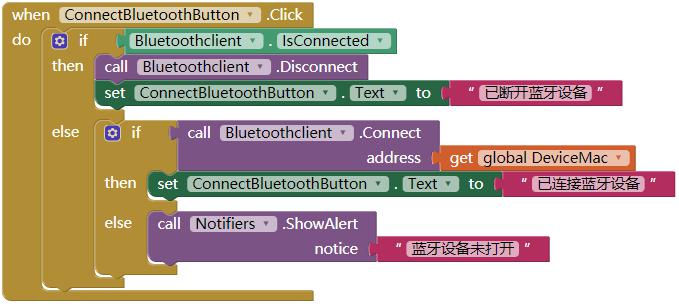
图10 连接和断开蓝牙设备程序
数据存储程序由Storage栏中的File组件实现。程序中每1s存储一次数据,数据保存在txt文档中,并自动添加到文档内容的末尾,不会覆盖原有的数据,以免造成数据丢失,部分数据存储程序如图11所示。
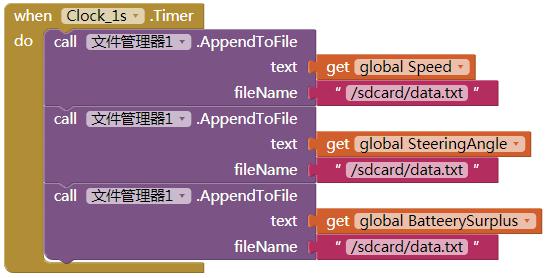
图11 部分数据存储程序
6 虚拟监控仪器性能验证
在App Inventor软件的Designer设计界面完成虚拟监控的外观制作,在Blocks Editor块编辑界面完成数据处理和逻辑算法的编辑。虚拟监控仪器的外观如图12所示。
设计完成后,需要生成apk文件安装到智能手机。生成apk文件的步骤为选择App Inventor软件的Build菜单项,在其下拉菜单中选择provide .apk to my computer选项,即可生成apk文件[9],将此文件复制到智能手机中,双击该文件即可安装。安装到智能手机后的界面如图13所示。


图12 虚拟遥控器设计外观图 图13 安装在智能手机的虚拟遥控器界面图
为了验证虚拟监控仪器的性能,搭建了验证试验台,多旋翼无人机飞行控制器通过蓝牙模块与智能手机蓝牙模块配对通信。首先验证虚拟监控仪器接收飞行控制器发送的工作状态参数;其次验证虚拟监控仪器向飞行控制器发送姿态参数和控制参数,借助电脑端的无人机地面站软件显示相关参数;最后验证通信距离,在没有障碍物的情况下,30米内通信正常。虚拟监控仪器性能验证平台如图14所示。

图14 虚拟监控仪器性能验证平台
7 结论
基于App Inventor软件开发虚拟监控仪器降低了多旋翼无人机教学平台的研制费用。由于虚拟监控仪器依靠智能手机进行工作,操作简单易学,没有硬件运行故障,极大提高了教学效率。经过性能试验验证表明,多旋翼无人机飞行控制器与虚拟监控仪器通过蓝牙模块能够进行有效通信,通信距离为30米以内,满足教学平台的使用要求。






共0条 [查看全部] 网友评论