



关键词:永磁同步电机;增量式编码器;转子初始位置;编码器校正
1 引言
永磁同步电机具有功率密度高、结构简单以及调速性能好等优点,在工业领域得到广泛的应用[1]。为了完成永磁同步电机的转速和转矩控制,通常需要精确的转子位置信息[2]。获得转子位置信息的方法主要分为有位置传感器和无位置传感器两类,近年来,无位置传感器的研究受到国内外学者的广泛关注,但是由于算法复杂、对电机参数依赖性强、估算精度低等缺点,在大多数应用场合还是采用有位置传感器方式[3]。目前应用最多的位置传感器是编码器,编码器按照编码方式可分为增量式编码器、绝对式编码器和混合式编码器,增量式编码器由于结构简单、测速精度高、成本低、接口电路简单等优点,在电机控制领域得到广泛应用[4]。由于增量式编码器不能提供准确的转子初始位置信息,所以在使用增量式编码器的系统中,需要额外的方法来确定电机转子初始位置。
本文分析了在未知转子初始位置时直接启动永磁同步电机可能出现的情况,提出了利用增量式编码器的A、B脉冲信号搜索转子初始位置的方法。在电机旋转几个脉冲的情况下,通过DSP的高速运算能力搜索电机初始位置,并在起动过程中校正增量式编码器。
在转子初始位置未知的情况下,假设启动时给定的电流矢量方向和三相ABC坐标系的A轴方向相同,那么转子初始位置和A轴的夹角关系可分为以下4种情况。
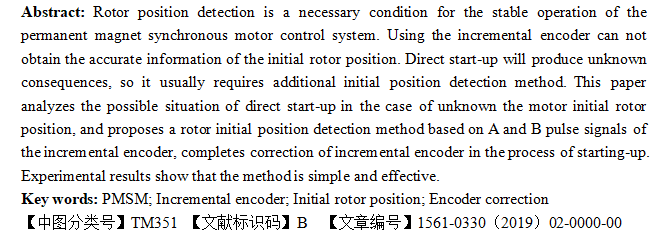
(1)转子和A轴夹角为0°,如图1所示。这种情况下,相同幅值的电流产生的电磁转矩最大,是永磁同步电机所期望的启动情况。
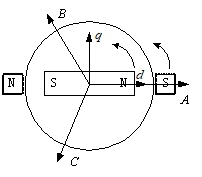
图1 转子和A轴夹角为0°
(2)转子和A轴夹角为90°,如图2所示。这种情况下,所产生的电磁转矩为0,启动时转子将静止不转,电机无法启动。
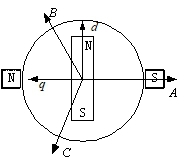
图2 转子和A轴夹角为90°
(3)转子和A轴夹角为锐角,如图3所示。这种情况下,转子受到的力矩不是最大,电机在空载或轻载的情况下有可能启动,但是由于电机没有足够大的电磁转矩,电机不能带重载启动,并且在启动过程中会产生过流现象。
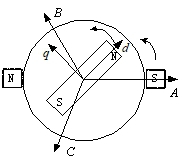
图3 转子和A轴夹角为锐角
(4)转子与A轴夹角为钝角,如图4所示。这种情况下,由于同性相斥,异性相吸,通电后产生的磁场会先排斥转子,即出现反转的现象,随后转过一定角度后又吸引转子,才能正常启动。
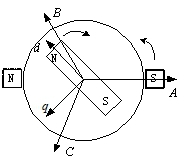
图4 转子和A轴夹角为钝角
由以上分析可知,在转子初始位置未知时启动永磁同步电机,出现的大多数情况是所不期望的,所以一般先通过额外的方法确定转子初始位置,然后再启动。
3 基于增量式编码器的搜索法
该方法在确定转子初始位置的过程中,向电机注入合适的电流矢量,DSP根据电机微动产生的A、B脉冲确定电机转向,进而改变注入电流矢量的方向,通过多次注入,不断缩小转子初始位置范围。
实验以2对极的永磁同步电机为研究对象,360°的机械空间被划分为2个部分,初始转子位置可能在0°到180°之间。假设转子在图5的某一位置,下面用搜索法来寻找转子与A轴的夹角。
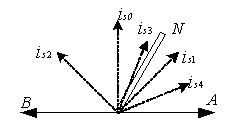
图5 搜索法原理示意图
初始定位时首先产生与A轴夹角90°的电流矢量![]() ,通过增量式编码器的A、B信号确定电机微动的方向,如果转子是顺时针微动,则说明转子位置在90°到180°之间;如果转子逆时针微动,则说明转子位置0°到90°之间。如果是第二种情况,下次产生与A轴夹角45°的电流矢量
,通过增量式编码器的A、B信号确定电机微动的方向,如果转子是顺时针微动,则说明转子位置在90°到180°之间;如果转子逆时针微动,则说明转子位置0°到90°之间。如果是第二种情况,下次产生与A轴夹角45°的电流矢量![]() ,如果转子顺时针微动,则说明转子位置在45°到90°之间;如果转子逆时针微动,则说明转子位置在0°到45°之间,针对第一种情况,下次注入与A轴夹角67.5°的电流矢量
,如果转子顺时针微动,则说明转子位置在45°到90°之间;如果转子逆时针微动,则说明转子位置在0°到45°之间,针对第一种情况,下次注入与A轴夹角67.5°的电流矢量![]() 。以后的操作类似,搜索法的程序流程图如图6所示,根据系统的实际情况选择合适的检测次数。
。以后的操作类似,搜索法的程序流程图如图6所示,根据系统的实际情况选择合适的检测次数。
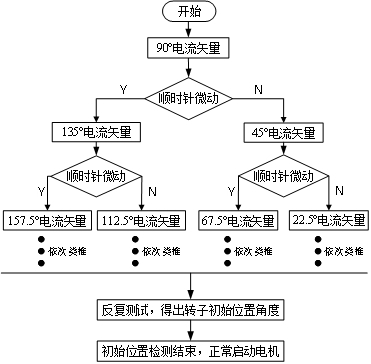
图6 搜索法程序流程图
在初始定位过程中,电流矢量的幅值和作用时间是重要参数,如果电流的幅值太大或作用时间太长,电机会转动很大角度。所以随着转子定位范围的缩小,同时减小电流矢量的幅值和作用时间,避免电机转动角度过大。在检测过程中,由于编码器一周输出的脉冲多达数千,而电机转过几个脉冲就可以检测出微动方向,所以初始定位时电机基本不动,满足大多数应用场合。
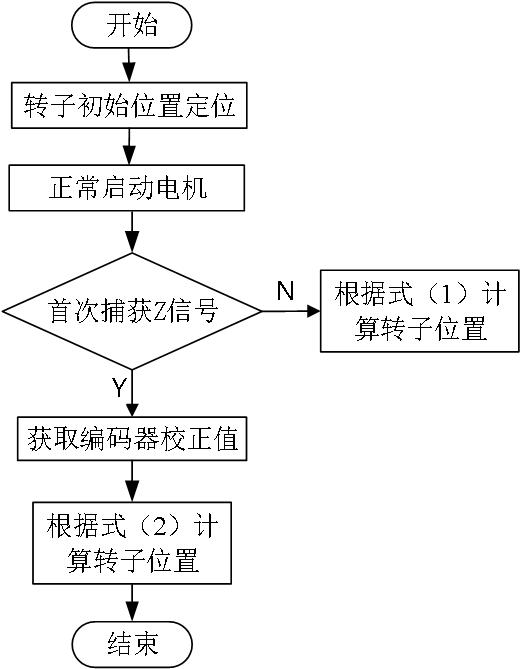
图7 编码器校正的程序流程图
为便于说明,将C定义为“编码器校正值”。图7给出编码器校正的程序流程图。首先根据搜索法确定转子的初始位置,然后正常启动电机,在首次检测到Z信号前,根据式(1)计算转子的电气角度。在首次检测到Z信号时记录此时的编码器校正值,按照式(3)计算Z信号和A轴的机械偏差角,完成编码器的校正,再根据式(2)计算出转子的电气角度。
5 实验验证
为了验证所提出的转子初始位置检测和编码器校正方法,搭建了永磁同步电机驱动控制实验平台,进行实验验证。主控芯片为TMS320F28335,电机采用400W 、2对极的表贴式永磁同步电机,增量式编码器为1024线的欧姆龙编码器,型号为E6B2_CWZ6C。
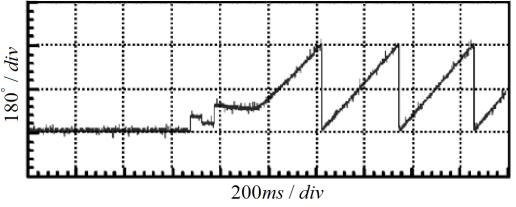
图8 搜索法定位的转子角度波形
图8为搜索法定位的转子角度波形,可以看出,转子在初始时刻有轻微转动,随着注入电流矢量次数的增加,转子基本不动,并逐渐逼近真实值,本实验给定8次电流矢量,最大误差为0.703°,然后把该检测值用于启动。
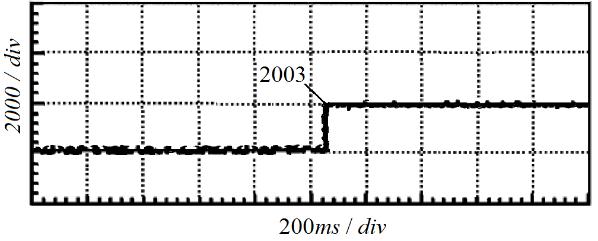
图9 编码器校正实验结果
编码器的校正实验结果如图9所示,启动时,在首次检测到Z信号之前,编码器的校正值为0,检测到Z信号后,校正值更新到2003。完成转子的初始定位和编码器的校正,永磁同步电机控制系统便能顺利启动和运行。
6 结论
本文提出了一种基于增量式编码器的永磁同步电机转子初始位置检测方法,并在启动过程中完成编码器的校正,实现电机的平稳启动和可靠运行。实验结果表明,该策略简单有效,适用于在初始定位时允许转子微动的应用场合。







共0条 [查看全部] 网友评论