


关键词:直流调速系统;直流电机;转速开环;稳态特性
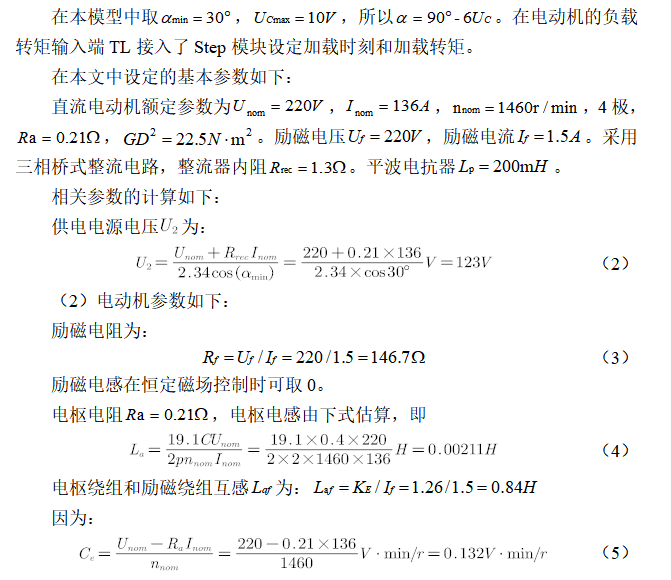
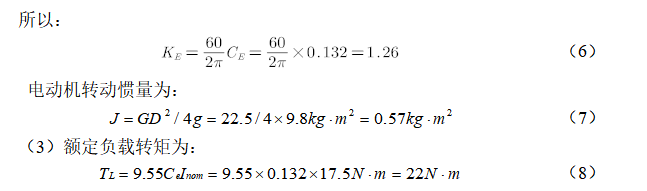
1 引言
随着近些年来我国经济的迅速发展,工农业生产、交通运输以及日常生活越来越多的需求对电机调速系统的设计要求也越来越高。直流电机较交流电机有着较大的启动转矩,具有良好的运行和控制特性,能够在广泛范围内进行平滑的调速。因此,凭借着直流调速系统结构简单、控制方便、工作可靠的特点,在许多大功率和调速性能要求较高的场合,如矿井、挖掘机、机床以及电梯等有着广泛的应用。从调速系统的发展过程来看,直流调速系统在理论及实践上均已经很成熟了,并且他还是交流调速系统的控制基础,因此,直流调速系统在生活生产中占据着重要的地位。
利用仿真的手段对设计的控制系统进行验证具有十分重要的意义。对于直流调速系统我们利用Matlab/Simulink软件就可以进行仿真。直流调速系统仿真研究的内容包括系统的建模性能分析算法设计和优化参数等几个方面,而算法设计是仿真中最重要的一项。本文对一些典型的直流电机控制系统从原理上进行了分析,然后直流开环调速系统、转速闭环调速系统进行了仿真建模,随后对系统的稳态及动态指标进行了分析。
2 直流电动机开环调速系统
2.1 直流开环调速系统原理
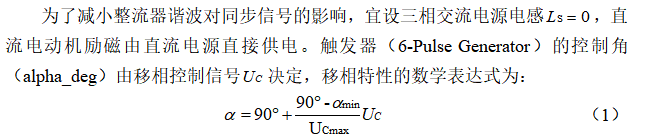
直流开环调速系统的电气原理如图1所示。直流电动机电枢由三相晶闸管整流电路经平波电抗器L供电,并通过改变触发器移相控制信号![]() 调节晶闸管的控制角,从而改变整流器的输出电压实现直流电动机的调速。在仿真中为了简化模型,省略了整流变压器和同步变压器,整流器和触发同步使用同一交流电源,直流电动机励磁由直流电源直接供电。
调节晶闸管的控制角,从而改变整流器的输出电压实现直流电动机的调速。在仿真中为了简化模型,省略了整流变压器和同步变压器,整流器和触发同步使用同一交流电源,直流电动机励磁由直流电源直接供电。
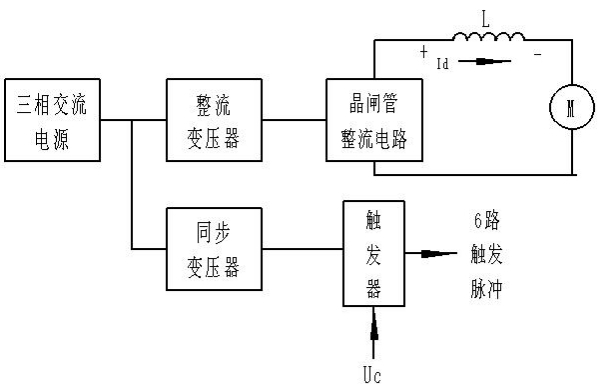
图1 直流开环调速系统电气原理
其移相特性如图2所示。
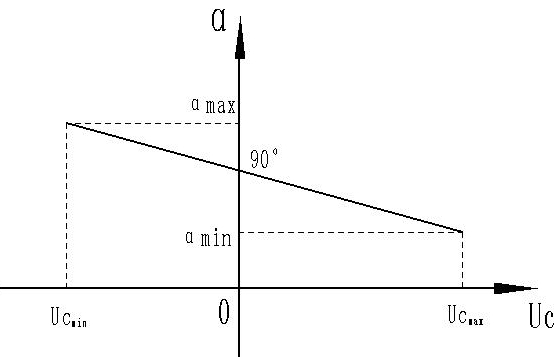
图2 移相特性
2.2 直流开环调速系统Matlab/Simulink建模
仿真的原理图如图3所示。
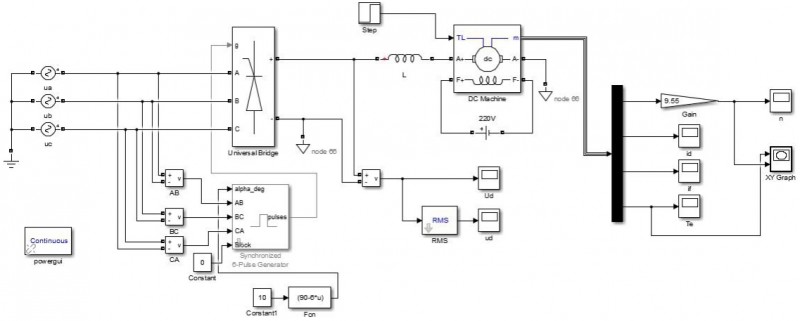
图3 直流电动机开环调速系统结构图
根据2.1节中的参数计算结果,对MATLAB模型中的各模块参数设置如表1所示。
(1)三相电源:此处用三组交流电源相位各相差120°代替;

(2)平波电抗器:电感![]() ;
;
(3)直流电动机:直流电动机参数如表2所示。
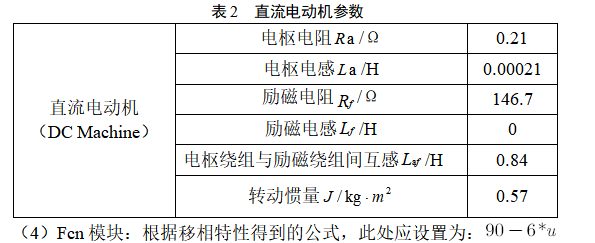
(5)Step模块:
Start time: 0.5s
Initial value: 0
Final value: 171.4
(6)Gain模块:放大倍数设置为9.55;
(7)设置仿真参数:
仿真算法采用ode15s,仿真时间为4s,电动机空载起动,起动0.5s后突加额定负载。
2.3 仿真结果及分析
启动仿真后,观察结果如图4所示,它为整流器输出端的部分电压波形。
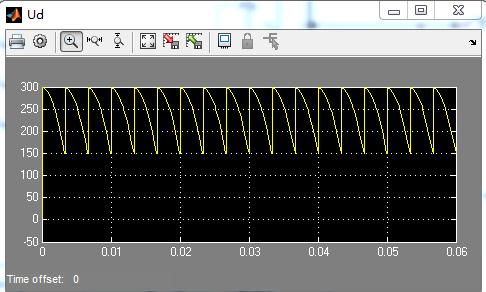
图4 整流器输出端电压波形![]()
图5所示为经过平波电抗器后电动机电枢两端电压波形。

图5 经过平波电抗器后电动机电枢两端电压波形
图6所示为电动机电枢回路转速变化波形。
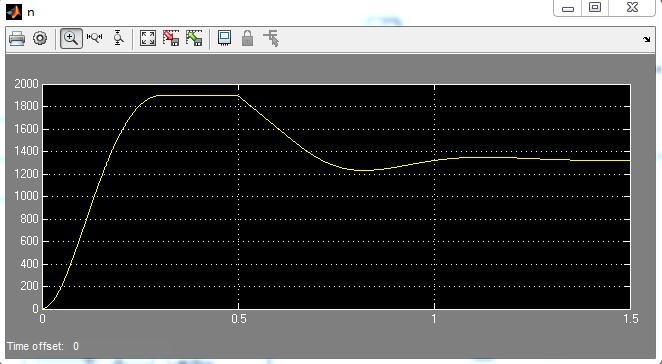
图6 电动机电枢回路转速变化波形
图7所示为电动机电枢回路电流变化波形。
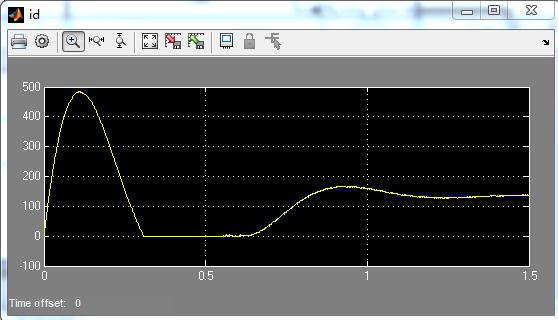
图7 电动机电枢回路电流变化波形
图8所示为电动机转矩变化曲线。
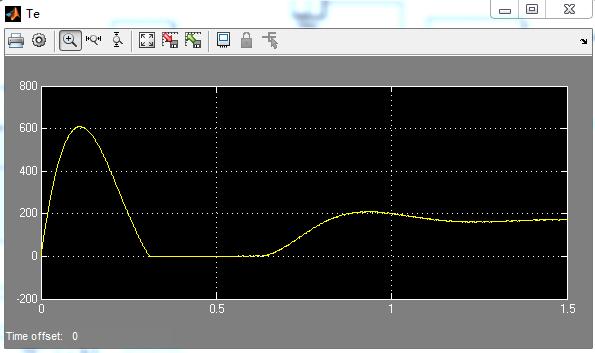
图8 电动机转矩变化曲线
图9所示为工作过程中电动机的转矩-转速特性曲线。
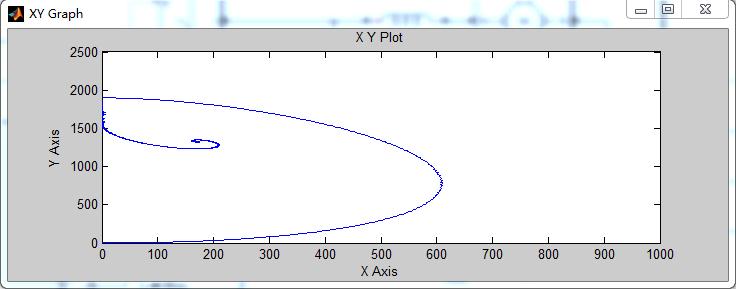
图9 电动机的转矩-转速特性曲线
由上面所示的仿真结果不难看出经过平波电抗器后电动机两端电压比整流器输出端的电压的电压波形脉动少了许多,电压平均值在225V左右符合设计要求。图5显示,最终电压平均值稳定在225V左右,因此结果是正确的。
图6和7所示为电动机电枢回路电流和转速变化过程,在全压直接起动情况下,起动电流很大,在0.25s左右起动电流下降为零(空载起动),起动过程结束,这时电动机转速上升到最高值。在起动0.5s后加额定负载,电动机的转速下降,电流增加。
图8所示为电动机的转矩变化曲线,可看出转矩曲线与电流成比例。
图9给出了工作过程中电动机的转矩-转速特性曲线。通过仿真反映了开环晶闸管-直流电动机系统的空载起动和加载工作情况。
3 转速负反馈有静差直流电动机系统
3.1 带转速反馈的有静差直流调速系统
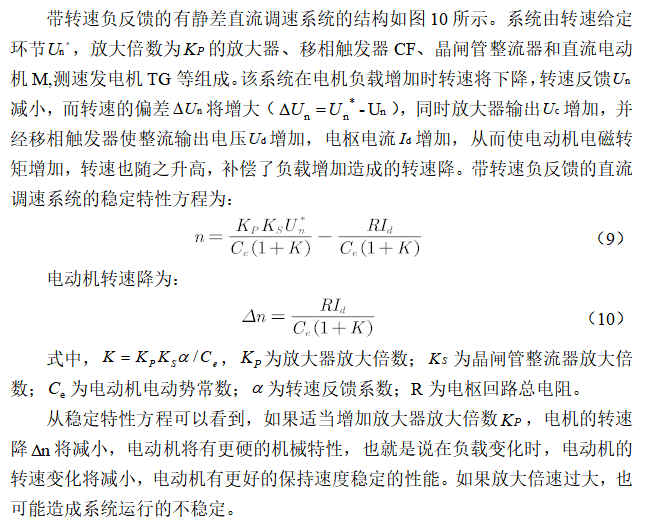
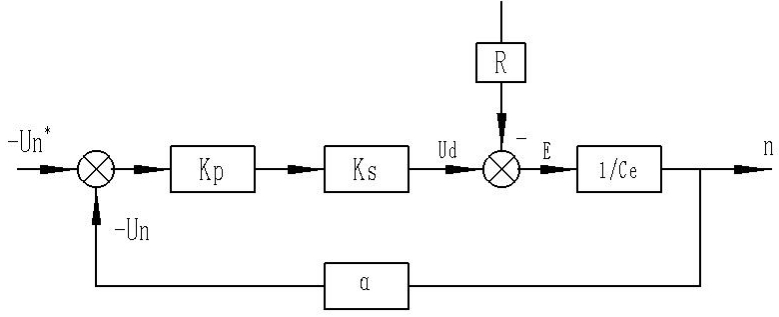
图10 转速反馈直流调速系统稳态结构
3.2 直流转速闭环调速系统稳态特性
转速反馈直流调速系统稳态结构图如图10所示。
本文取参数如下:
直流电动机的额定参数为220V、55A、1000r/min,电动势常数Ce=0.193V·min/r,晶闸管整流器放大倍数Ks=44,电枢回路总电阻R=1Ω,转速反馈系数α=0.0116。
根据2.1节中电机稳态方程及电机转速降公式进行计算得到转速给定值应该为![]() 。则利用MATLAB仿真如图11所示。
。则利用MATLAB仿真如图11所示。
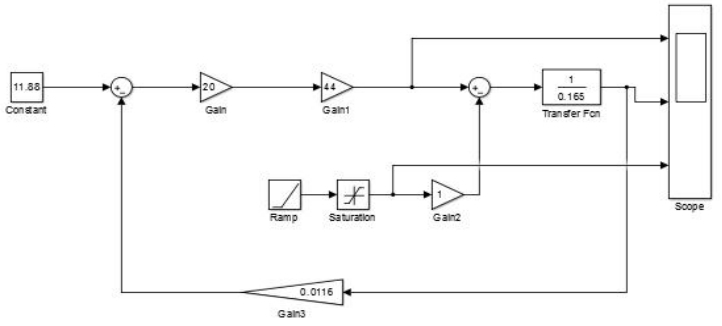
图11 直流转速闭环调速系统稳态特性仿真模型
在模型中按照已知条件带入模块参数,当Kp=20时然后设置仿真参数后,启动仿真然后打开示波器可以观察电压、转速和负载的稳态曲线如图12所示。
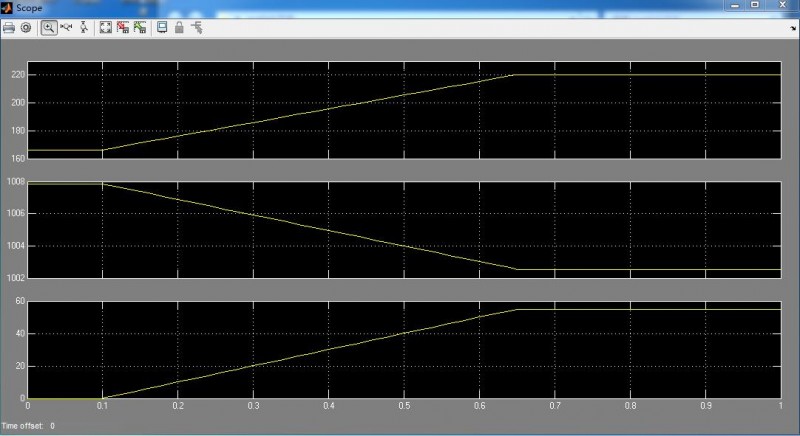
图12 单闭环有静差直流调速系统稳态特性曲线(Kp=20)
在系统空载时(0.1s加载前)整流器输出电压为220V,转速为1002.5r/min。随着负载电流的增加,转速略有下降,在大约0.64s时,电流达到额定值,这时的转速为1007.5r/min,系统的转速降为![]() ,如图13为当Kp=40时系统的特性:
,如图13为当Kp=40时系统的特性:
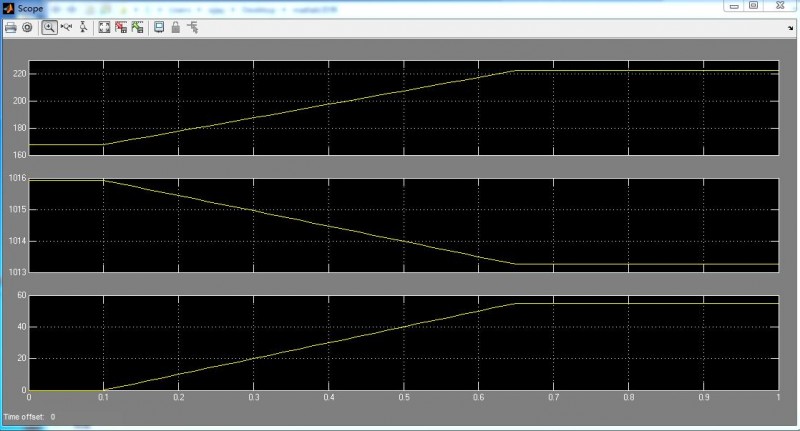
图13 单闭环有静差直流调速系统稳态特性曲线(Kp=40)
不难看出,随着放大倍数的增加,系统转速降略减小,静特性的硬度增加,抗负载扰动的能力提高。
3.3 带转速反馈的有静差直流调速系统Matlab/Simulink建模
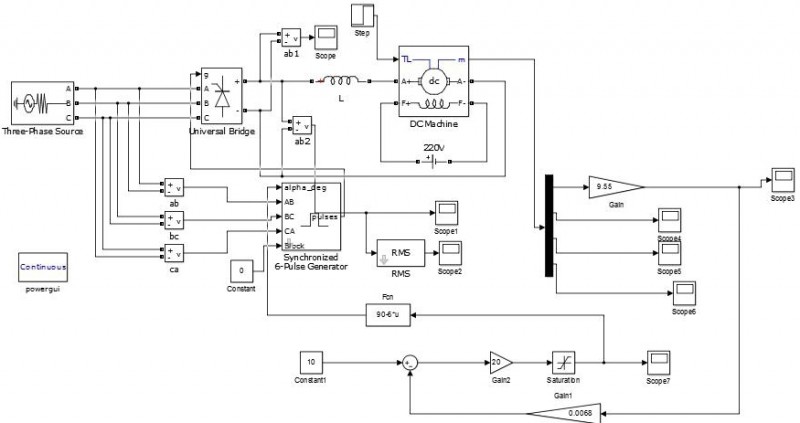
图14 转速负反馈有静差直流调速系统仿真模型
3.4 仿真结果及分析
![]()
![]()
![]()
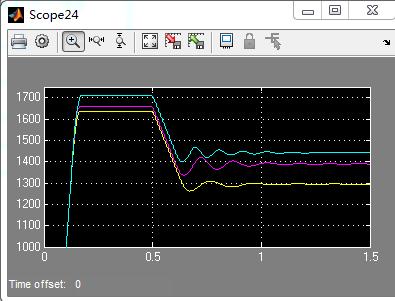
图15 额定转速时不同放大倍数时的响应曲线
(注:蓝色-Kp=20;紫色Kp=10;黄色Kp=5)
不难看出,随着放大器放大倍数的增加,系统的稳态转速提高,即稳态转速降减小。
图16所示为在1/2额定转速![]() =5时的转速响应曲线,以Kp=10和200两种情况进行比较,在Kp=200时,稳态转速降减小但是调节过程中的震荡系数增加,这从相应的移相控制信号变化也可以看到相同的情况。
=5时的转速响应曲线,以Kp=10和200两种情况进行比较,在Kp=200时,稳态转速降减小但是调节过程中的震荡系数增加,这从相应的移相控制信号变化也可以看到相同的情况。
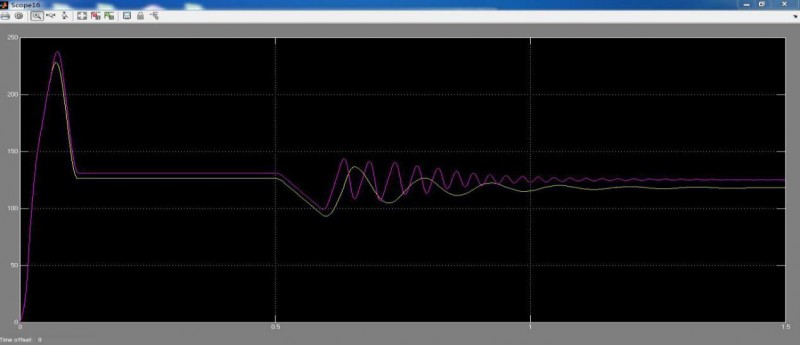
图16 移相控制信号波形
(注:紫色-Kp=200;黄色Kp=10)
4 结论
直流电机调速系统在机械电子工业中得到越来越广泛的应用,电机的速度控制与消除扰动的性能是衡量调速系统的最主要性能指标之一。对基于的直流电机调速系统所作的仿真研究,方便地实现了算法设计与系统性能分析。
本文首先对直流开环系统进行了仿真分析,通过仿真结果可以知道,开环系统的仿真结果与实际需求一致,说明该控制算法的正确性。随后我们在开换系统的基础上添加了转速闭环进行建模仿真,并对不同的放大倍数情况下进行对比分析。我们可以得到放大倍数的增大,会使得系统的稳定转速提高,稳态转速降减小,同时会伴随着震荡增加。因此,合适的放大倍数对系统的控制效果影响很大。




共0条 [查看全部] 网友评论