


1 引言
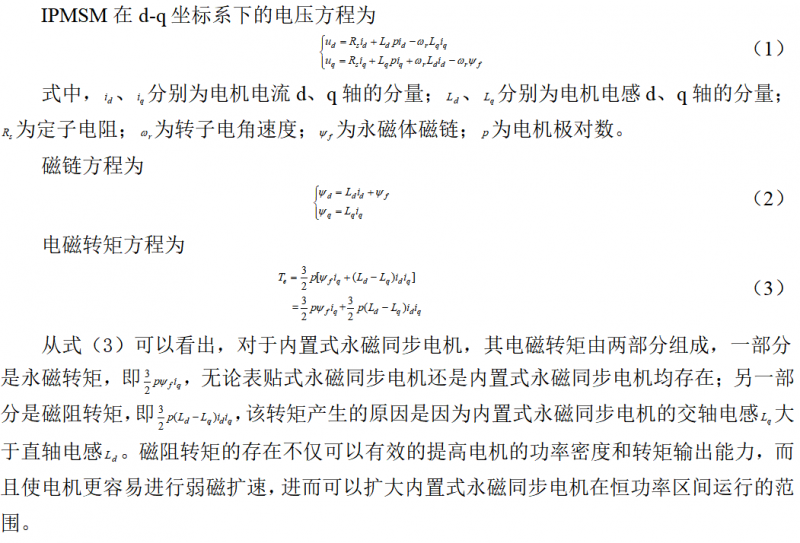
内置式永磁同步电机(Interior Permanent Magnet Synchronous Motor, IPMSM)具有体积小、效率高、功率密度高以及调速范围宽等优点,在电动汽车领域得到了广泛的应用[1-2]。而电机在运行过程中,其调速性能的优劣受电机参数的影响较大。因此,在永磁同步电机的调速系统设计过程中考虑参数变化很有必要。
目前,针对电感参数的处理方法中,主要由两个方面进行,其一是电感参数的在线辨识[3],即在电机运行过程中,直接利用辨识算法进行在线辨识,但该方法虽然能够在线辨识出电感参数的大小,却有一定的延时,同时辨识结果也存在一定的误差;其二是通过改进控制器来适应电感参数的变化,其中包括通过PI参数的自整定来适应电感参数的变化。文献[4]提出了一种基于民BF网络动态辨识的BP神经网络PID参数自整定算法,能够实现PID参数的在线自整定和优化,该算法能够有效解决被控对象的不确定性和非线性等问题,能实现参数的自整定,适用于时变非线性和强干扰的复杂系统中。文献[5]提出神经网络PID整定方法,将神经网络算法的并行运算和自适应的特点应用到PID整定中。文献[6]将模糊推理方法与PID相结合,根据误差及误差变化在线调整PID参数。文献[7]提出一种将基于模型和规则的参数自整定思想相结合的参数自整定及优化策略。文献[8]设计了基于参数自整定模糊PID控制的双闭环直流调速系统。
针对电机在弱磁过程中磁路交叉饱和对交-直轴电感的影响,本文设计了一种基于变电感参数的PI参数自整定控制系统。
2 IPMSM弱磁控制原理
2.1 IPMSM的d-q坐标系数学模型
为便于分析,通过坐标变换得到永磁同步电机d-q坐标系下的数学模型,其数学模型的矢量图如图1所示。
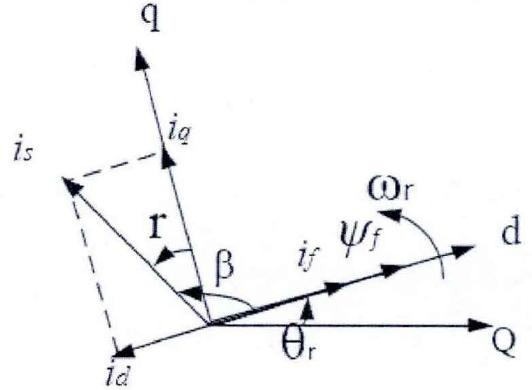
图1 永磁同步电机数学模型矢量图
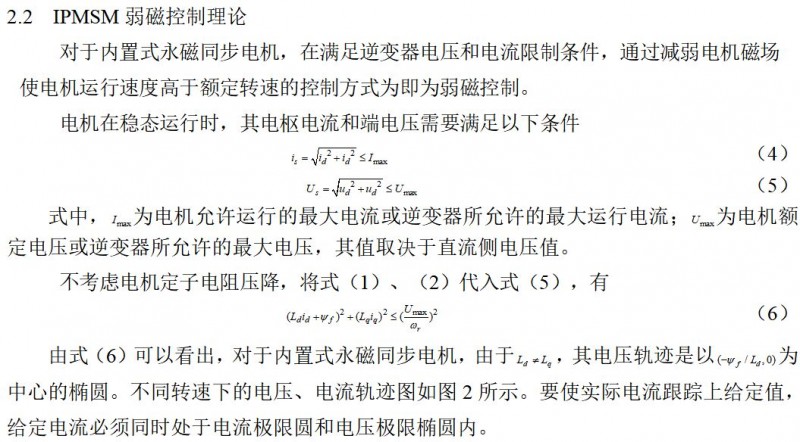 2.2 IPMSM弱磁控制理论
2.2 IPMSM弱磁控制理论
对于内置式永磁同步电机,在满足逆变器电压和电流限制条件,通过减弱电机磁场使电机运行速度高于额定转速的控制方式为即为弱磁控制。
电机在稳态运行时,其电枢电流和端电压需要满足以下条件
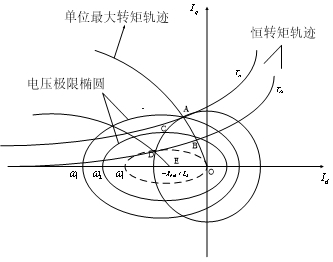
图2 电流控制轨迹
2.3 IPMSM弱磁控制模型
(1)最大转矩电流比(MTPA)控制
最大转矩电流比(MTPA)控制是内置式永磁同步电机应用最为广泛的一种矢量控制方法,其相量图如图3所示。
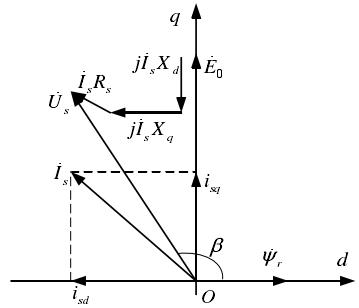
图3 最大转矩电流比控制的相量图
在同步旋转d-q坐标系下
 (7)
(7)
代入转矩方程,有
![]() (8)
(8)
采用MTPA控制时,其电流矢量应满足
 (9)
(9)
联立式(4),可得
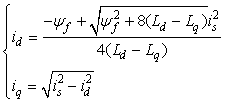 (10)
(10)
对于任意转矩都有对应的d-q轴电流来合成最小的电流法幅值,即可实现电动机的最大转矩电流比。图4为最大转矩电流比控制框图。
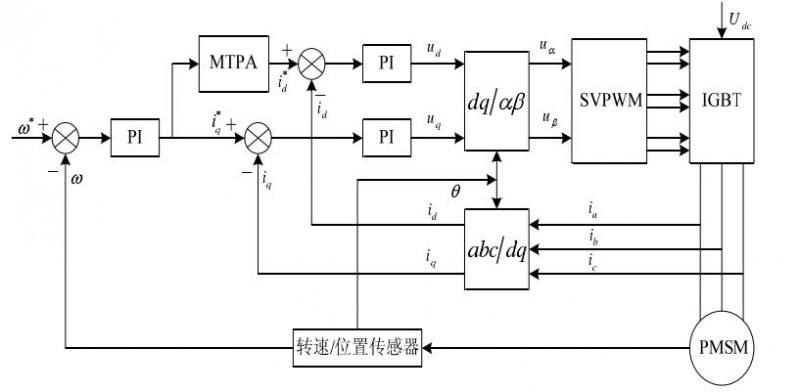
图4 最大转矩电流比控制框图
(2)弱磁控制
永磁同步电动机弱磁控制的思想源自他励直流电动机的调磁控制思想,当他励直流电动机端电压一旦达到所允许的最大工作电压时,想要获得更高的转速,应该延长电动机在恒功率区的运行范围,此时想要电压维持恒定必须通过降低电机的励磁电流来实现。
当电机运行于某一转速![]() 时,通过计算可求得电流矢量轨迹方程
时,通过计算可求得电流矢量轨迹方程
 (11)
(11)
当电压与电流均达到极限时,如需继续升速,则需降低输出转矩,有
 (12)
(12)
(3)最大转矩电压比(MTPV)控制
最大转矩电压比(MTPV)控制,是指输出同样的转矩条件下,所能达到的最大转速的最小定子电压的控制。MTPV轨迹实际上是把电压极限椭圆和转矩双曲线切点的连线起来的曲线,即产生不同转矩值所需的最小电压点的连线。
用![]() 表示成
表示成![]() 的函数,可得MTPV的轨迹方程
的函数,可得MTPV的轨迹方程
 (13)
(13)
2.4 变电感参数的PI参数整定
在内置式永磁同步电机中,转子磁路结构不对称,有效气隙小,电枢反应磁场的作用使磁阻发生很大的变化,d轴电感和q轴电感不相等,存在磁磁路饱和的现象。由于d轴位移永磁的轴向位置,且永磁体磁导率接近于空气磁导率,所以q轴的有效气隙比d轴的有效气隙小,因此电枢反应引起的磁路饱和主要存在于q轴。
在实际电机中,由于不同的电机设计方案以及所使用的材料的不同,其电感值会随之改变。应用有限元软件计算得到的受磁路饱和影响的d轴和q轴电感如图4所示。
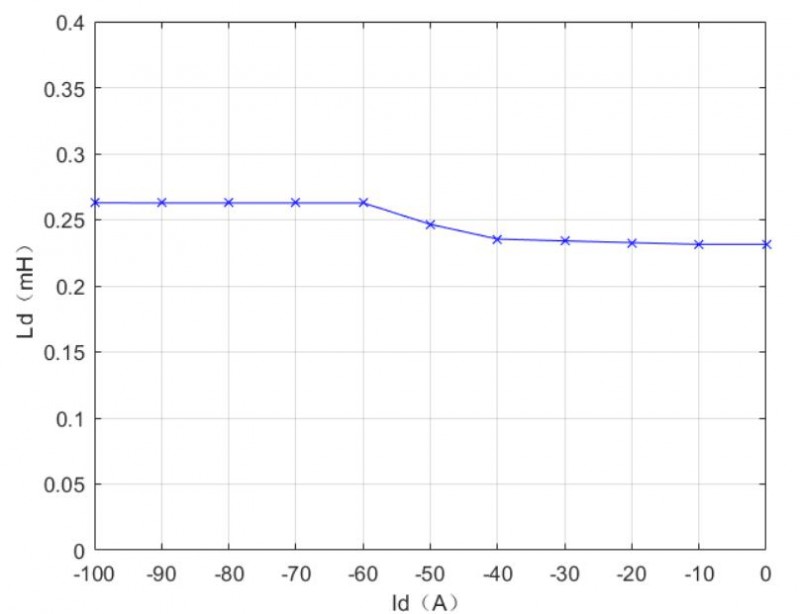
(a)d轴电感
(q)d轴电感
图5 考虑磁路饱和的电感参数变化曲线
从图5中可以看出,d、q轴电感并不是一个恒定的值。
3 仿真结果与分析
为验证本文所提出方法的有效性,利用Matlab中的Simulink搭建用于辨识电感参数的基于模型参考自适应的神经网络算法的模型,并进行仿真。电机参数如表1所示。
表1 电机参数
|
参数 |
数值 |
|
额定转速nN |
3000r/min |
|
极对数 |
6 |
|
最大直流母线电压Vdcmax |
350V |
|
最小直流母线电压Vdcmin |
270V |
|
转动惯量J |
0.11kg*m2 |
|
定子电阻Rs |
0.00005Ω |
|
转子磁链ψf |
0.11Wb |
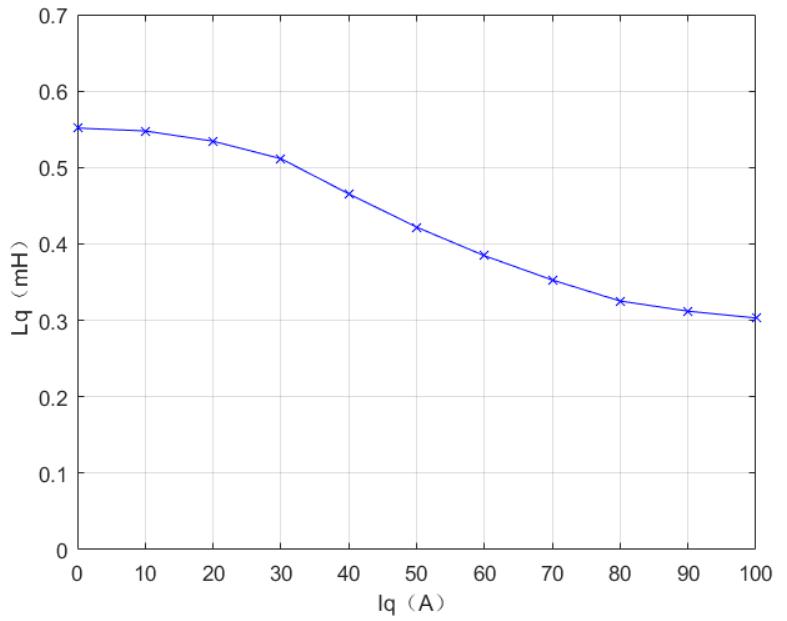
应用Simulink 搭建了基于变电感参数的PI参数自整定控制系统,其弱磁控制框图如图6所示。
图6 弱磁控制框图
转子磁场定向的矢量控制基本思想是在沿转子磁场定向的同步坐标系上,将定子电流矢量分解为磁场电流![]() 和转矩电流
和转矩电流![]()
![]() ,分别对其进行控制。永磁同步电机矢量控制系统是一种闭环控制系统,它与开环系统相比具有精度高、响应快、调速范围宽、运行平稳等优点。永磁同步电机矢量控制系统由五部分组成,分别为位置与速度检测模块、速度环及电流环PI调节模块、坐标变换模块和空间矢量脉宽调制模块。
,分别对其进行控制。永磁同步电机矢量控制系统是一种闭环控制系统,它与开环系统相比具有精度高、响应快、调速范围宽、运行平稳等优点。永磁同步电机矢量控制系统由五部分组成,分别为位置与速度检测模块、速度环及电流环PI调节模块、坐标变换模块和空间矢量脉宽调制模块。
为验证电感参数对控制系统的影响,分别对不考虑电感参数饱和及考虑电感参数饱和的两种情况进行对比分析。
3.1 不考虑电感参数饱和
图7-图8分别为d-q轴电流、电机输出转矩,此时并未考虑电感饱和。
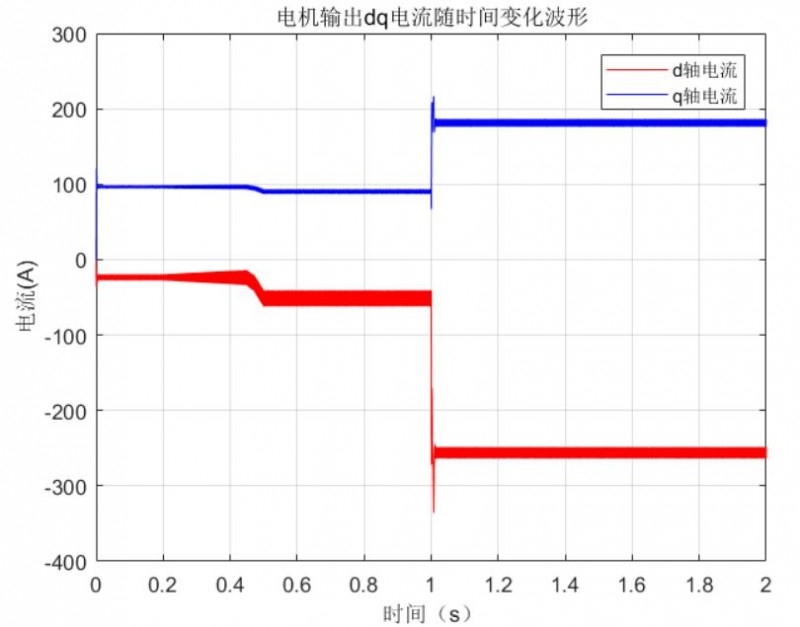
图7 d-q轴电流波形图
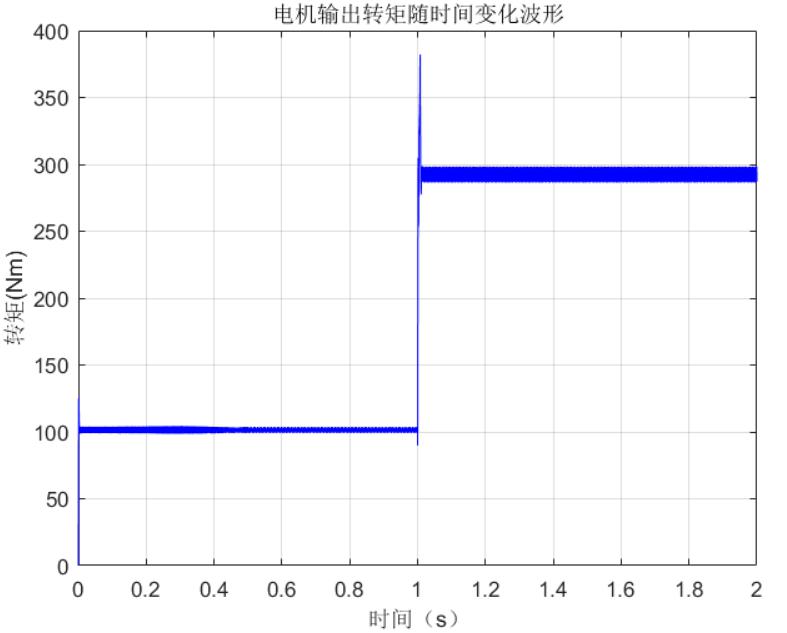
图8 电机输出转矩随时间变化波形
从图7中可以看出,电机的转矩在1s后从100Nm跃升到290Nm。
3.2 考虑电感参数饱和
图9-图11分别为d-q轴电流、电机输出转矩和转速。
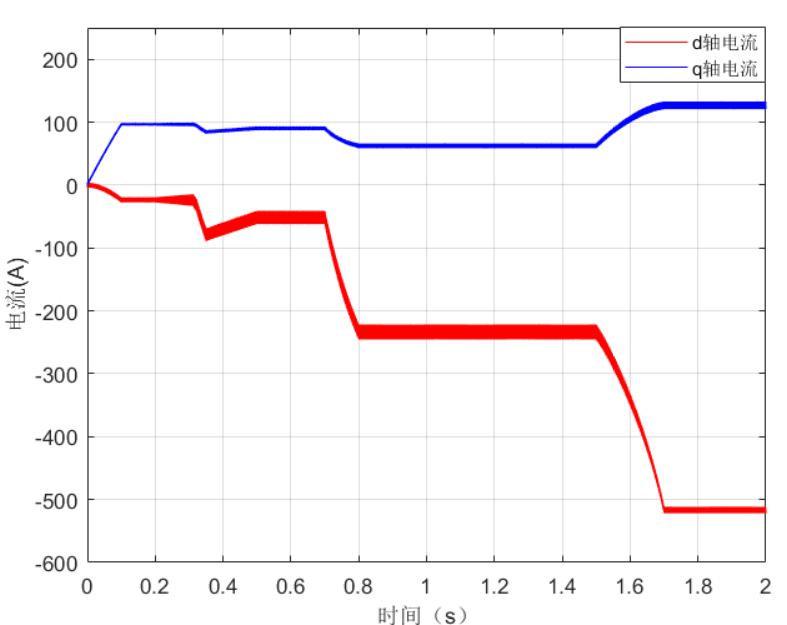
图9 d-q轴电流波形图
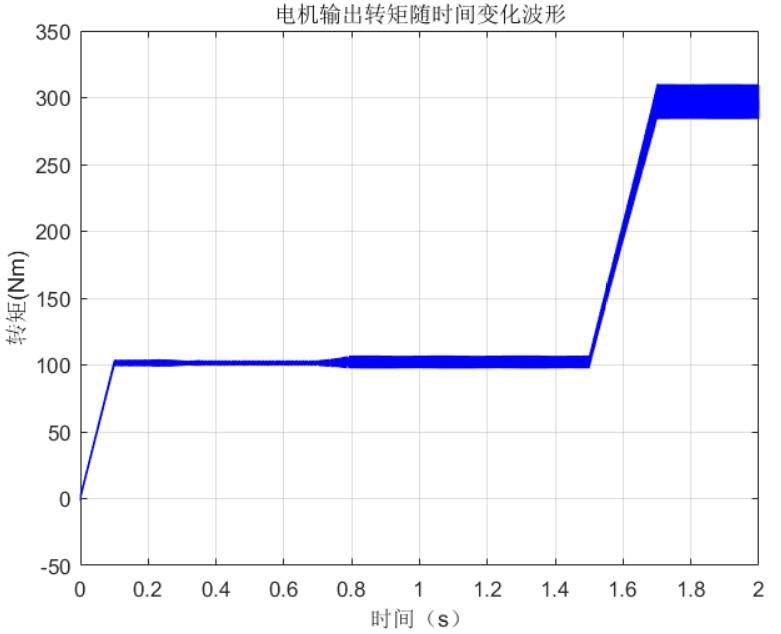
图10 电机输出转矩随时间变化波形
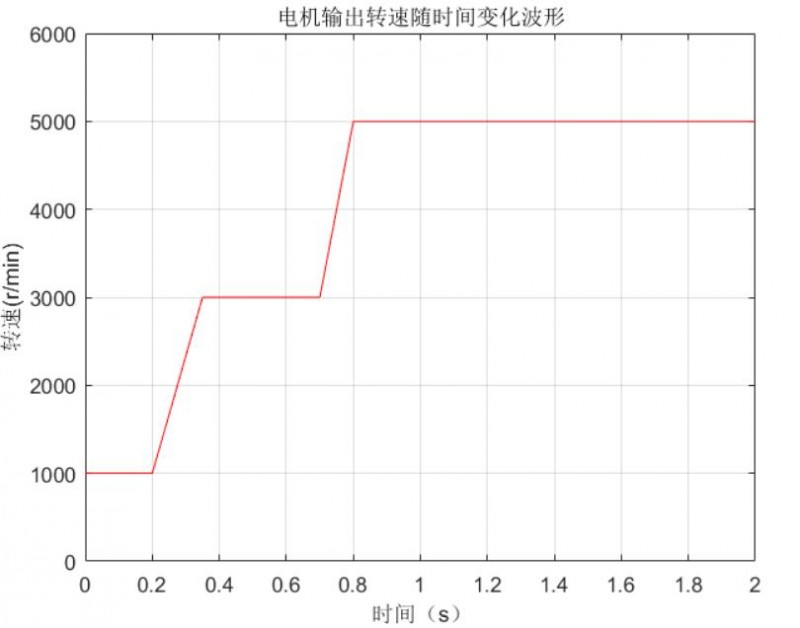
图11 电机输出转矩随时间变化波形
对比图6,从图9中可以看出,当考虑了电感参数饱和后,dq轴电流也不在平稳,这更符合实际电机工况。这是因为当电机进入弱磁区后,去磁电流是励磁磁场减弱,电机退出饱和,交-直轴电感均会受到影响,尤其是q轴电感变化很大。
4 结论
本文针对永磁同步电机在弱磁过程中由定子电流引起的磁路交叉饱和对交-直轴电感的影响,设计了一种基于变电感参数的PI参数自整定控制系统。仿真结果表明采用PI参数自整定的弱磁控制策略可使永磁同步电机矢量控制系统具有良好的动态性能和鲁棒性。




共0条 [查看全部] 网友评论