



关键词:永磁同步电机;导向机制;改进萤火虫算法;PID控制器
1 引言
永磁同步电机具有效率高、功率密度大和控制性能好等特点,被广泛应用于各个领域。由于使用传感器会导致电机成本增加、使用范围受限和可靠性降低等问题,因此国内外学者对如何在永磁同步电机中避免使用传感器进行了研究。
目前针对永磁同步电机无位置传感器矢量控制系统提出了很多控制策略。文献[1]提出一种自适应的滑模控制,根据电机内外扰动自适应调节控制增益,提高了电机控制系统的鲁棒性;H. Lee、J. Lee等提出一种迭代滑模观测器增强了永磁同步电动机无传感器控制变参数的鲁棒性,电机速度估计和转子位置估计相比于传统的自适应算法更快;陆婉泉、林鹤云等提出了正弦饱和函数作为滑模控制的切换函数,减少了系统的抖振;文献[4]该方法具有设计简单、动态性能好等特点,预测控制最有可能成为继PI控制之后电力电子控制领域的替代方案, 文献[5]提出了一种基于连续时间模型非线性广义预测控制方法,该方法根据系统的非线性模型,通过泰勒级数展开得到预测模型,进而定义并优化包含预测输出的成本函数,得到非线性显式广义预测控制器。文献[6-7]在永磁同步电机转速–电流单环控制中考虑了电机机电两方面的非线性影响,动态性能好,结构更为简单,参数调节少,且不需要在线优化,计算量小。
永磁同步电机为非线性、强耦合的复杂系统,传统的PID控制难以达到理想的效果,本文提出一种具有导向机制的改进萤火虫算法,采用改进萤火虫算法对PID参数进行实时整定。实验结果表明,本文所提出的控制算法,能够准确和快速的跟踪电机转子的速度和位置,具有响应快、鲁棒性强的特点。
2 PMSM电机数学模型

3 改进萤火虫算法
对于传统的萤火虫算法,在迭代过程中,采用固定步长。在算法迭代前期,萤火虫种群的分布比较稀疏,算法适宜采用较大步长加快算法收敛速度;在算法迭代后期,适宜使用较小的步长防止错过最优解,提高算法精度。
3.1 自适应的移动策略
因为基本萤火虫算法采用固定步长会导致算法易陷入局部最优,迭代速度慢,易产生震荡等问题。本文根据公式(3)和公式(4)来动态的改变算法的移动步长。使步长在算法初期保持较大的数值,以便全局内搜索最佳解,防止算法陷入局部最优;在算法后期保持较小的数值,提高算法遍历性,防止错过最优解,提高算法精度。
![]() (3)
(3)
 (4)
(4)
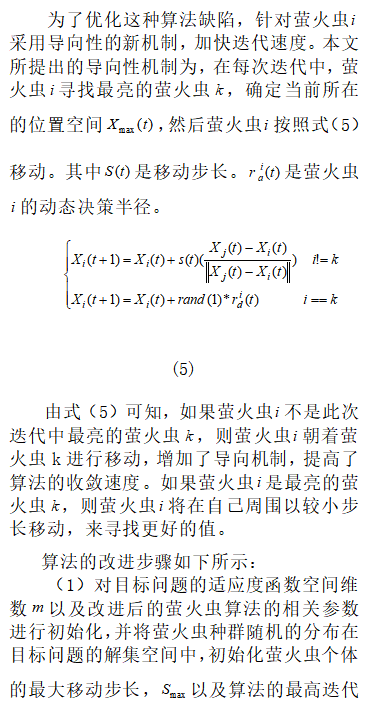
3.2 导向性移动策略
根据传统的萤火虫算法,如果萤火虫![]() 没有在动态决策半径内找到更亮的萤火虫
没有在动态决策半径内找到更亮的萤火虫![]() ,则萤火虫
,则萤火虫![]() 将不能移动。这个萤火虫虽然付出了大量的计算时间,但是并没有的到较好的位置移动。这种情况会导致算法迭代缓慢,增加算法进入局部最优的可能性。
将不能移动。这个萤火虫虽然付出了大量的计算时间,但是并没有的到较好的位置移动。这种情况会导致算法迭代缓慢,增加算法进入局部最优的可能性。
改进萤火虫算法流程图如图1所示。
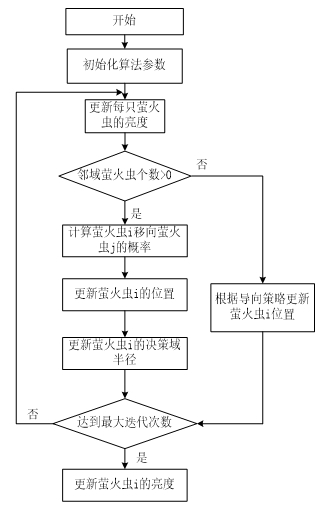
图1 算法流程图
![]()
4 改进萤火虫算法优化永磁同步电机智能PID控制器
在永磁同步电机中PID控制器的参数整定是最常遇到的问题,是否可以搜索到合适的PID参数直接关乎到系统的性能优劣。
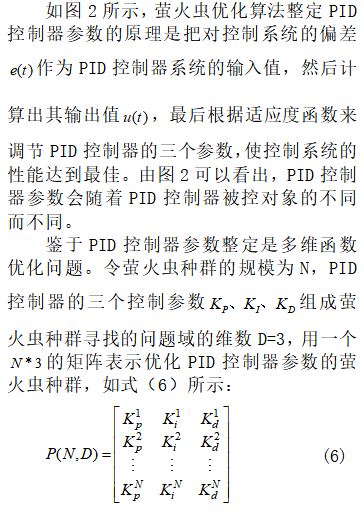
将每一个萤火虫对应一组PID控制器参数,然后在每次算法迭代中逐步优化每个萤火虫个体所对应的控制量,根据每一个萤火虫所处位置的优劣选取此次迭代中最优的萤火虫个体,经过多次迭代,最后将得到的最优位置的萤火虫所处的位置参数作为最后的PID控制器参数。基于改进的萤火虫算法的PID控制系统如图2所示。

图2 基于改进的萤火虫算法的PID控制系统图框图
![]()
5 实验结果及分析
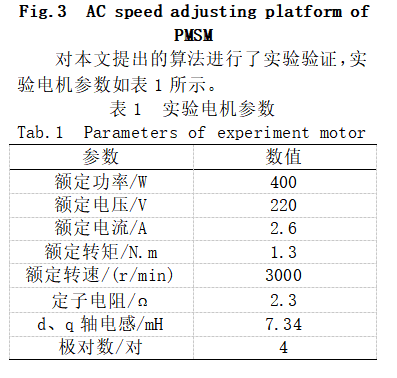
在永磁同步电机交流调速平台上,如图3所示。

图3 永磁同步电机交流调速平台
实验包括:稳定运行阶段给定转速突变、负载突增突降2种典型工况进行算法的实验验证。
(1)电机运行时,在给定转速突变情况下验证算法的动态性能。图4(a)为转速由500r/min突增到1000r/min情况下实际转速和给定转速波形图。可以看出加速时间为0.25s左右,转速超调较小,在加速之后可以迅速趋于稳定;图4(b)为电机稳定运行在1000r/min时,给定转速突减为500r/min的波形图。可以看出控制效果较好。由该图可知,本文算法可以使电机获得良好的动态性能。
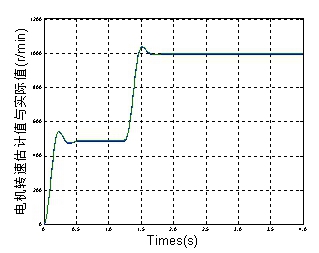
(a) 转速突增
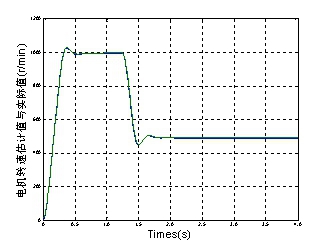
(b) 转速突减
图4 电机调速实验结果图
![]()
(2)电机运行时,在给定转矩突变情况下验证算法的鲁邦性。图5为电机在1000r/min、额定负载转矩的工况下,负载转矩变化的转速响应波形图。图5(a)为负载增加的波形图,可以看出在突加负载之后,电机转速出现小幅度的上升,在大约0.15s左右转速回到原来转速水平;图5(b)负载转矩突减的波形图,在突减负载之后,电机转速出现小幅度的下降,在大约0.15s之后转速快速回归原来转速。可以看出系统在外部负载扰动的情况下具有快速响应的能力。由该图可知,本文算法的控制系统受到外部负载干扰时具有较强的鲁棒性。
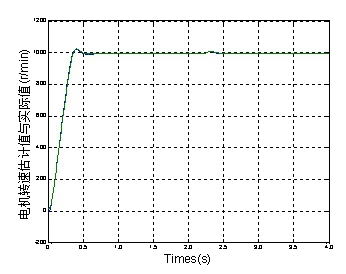
(a) 突加负载转矩
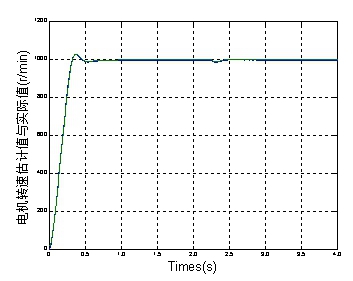
(b) 突减负载转矩
图5 电机变载实验结果图
![]()
6 结论
本文通过改进萤火虫算法对电机转速环PID参数进行整定。实现对转速的精确跟踪。实验表明,本文所提算法用在永磁同步电机上具有优秀的动态性能和鲁棒性,







共0条 [查看全部] 网友评论