


关键词:永磁同步电机;模糊PI控制;转速环

1 引言
永磁同步电机(PMSM)具有功率密度高、结构简单以及调速性能好等优点,在工业领域得到广泛应用[1]。传统的PMSM矢量控制系统往往采用内外环级联结构,即内环实现电流控制,外环实现转速控制[2]。速度环是矢量控制系统中的一个极其重要的环节,应该具有高精度、快响应、宽调速范围的特性。在实际控制中一般采用PI速度调节器对速度环进行控制,这种控制方案比较简单,易于实现,使系统获得较好的稳态精度[3]。然而,由于永磁同步电机的非线性和强耦合性,难于建立准确的数学模型,使得系统的抗干扰能力和快速性差,对参数波动的鲁棒性不够理想[4-5]。
为了使系统具有良好的快速性和鲁棒性,本文采用将模糊控制与传统的PI控制理论相结合的方法,构造一种模糊PI复合型控制系统。这种复合型系统既具有模糊控制器控制灵活、适应性强的特点,又具有PI控制器控制精度高的特点。本文设计了模糊PI控制器,并分别对采用传统PI控制器和模糊PI控制器的系统模型进行仿真分析,仿真结果表明,采用模糊PI控制器的系统具有更好的鲁棒性和抗干扰能力。
2 PMSM数学模型
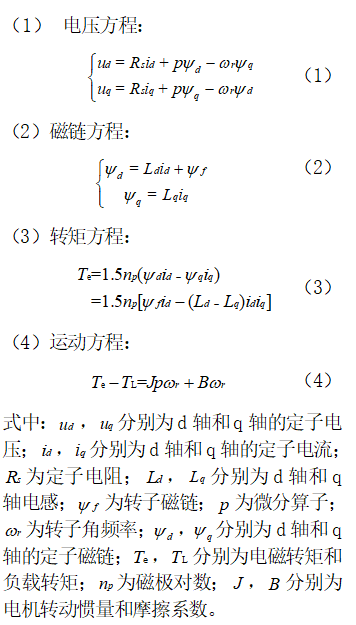
理想情况下,PMSM在d-q坐标系下的数学模型如下所示:
3 模糊PI控制器的设计
传统的PMSM矢量控制框图如图1所示,速度环采用传统的PI控制器,由于不具有在线整定参数的功能,因此不能满足在不同工况下系统对参数的自整定要求,从而影响其控制效果的进一步提高。

图1 PMSM矢量控制框图
本文以自整定模糊PI控制器代替传统的PI控制器,参数自整定模糊PI控制器的原理图如图2所示。以偏差![]() 和偏差变化率
和偏差变化率![]() 作为输入,经过模糊化、模糊推理和解模糊三个步骤,获得PI参数的调整量
作为输入,经过模糊化、模糊推理和解模糊三个步骤,获得PI参数的调整量 、
、![]() ,然后通过式(5)和式(6)实现PI控制器的参数自整定,其中
,然后通过式(5)和式(6)实现PI控制器的参数自整定,其中![]() 、
、![]() 为原来整定好的PI控制器参数。
为原来整定好的PI控制器参数。
![]() (5)
(5)
![]() (6)
(6)
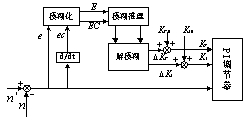
图2 模糊PI控制器结构框图
3.1 模糊化
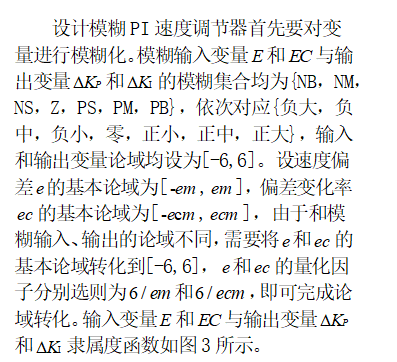

图3 输入和输出变量的隶属度函数
3.2 模糊规则的制定
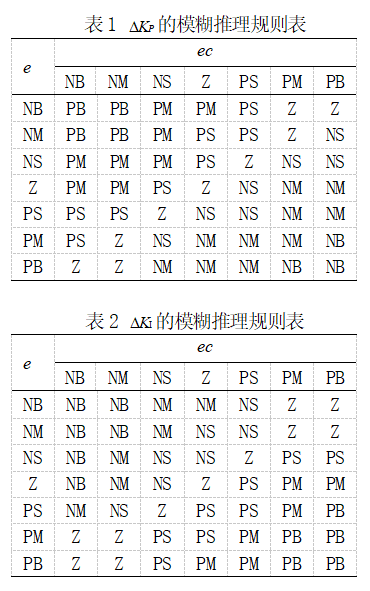
设计速度环的目的是使系统的反馈转速最大限度的跟随给定速度,无超调,响应速度快且出现干扰时能快速的调整达到稳定。因此,建立模糊控制规则的基本思想是根据速度环中的实际输出转速和给定转速的误差大小及其误差变化率的变化趋势来确定输出量的大小,同保证响应速度和限制超调,以达到良好的控制结果。考虑到模糊控制器输出为PI控制器的调整量,模糊规则的建立还要考虑到PI参数![]() 、
、![]() 的变化对整个系统性能的影响。在综合专家知识的基础上,结合前人长期的工程经验积累,并且进行大量仿真调试,得到PI参数调整量
的变化对整个系统性能的影响。在综合专家知识的基础上,结合前人长期的工程经验积累,并且进行大量仿真调试,得到PI参数调整量![]() 、
、![]() 的模糊控制规则表,分别如表1和表2所示。
的模糊控制规则表,分别如表1和表2所示。
3.3 模糊推理和解模糊

4 仿真结果分析
为验证算法的可行性,在 Matlab /Simulink 环境下搭建PMSM矢量控制系统仿真模型,速度环控制器分别采用传统的PI控制器和提出的模糊PI控制器进行对比。系统采用的 PMSM 参数为:定子电阻![]() 为1.09Ω;交直轴电感
为1.09Ω;交直轴电感![]() ,
,  均为3.3mH;永磁磁链为0.175Wb;电动机转动惯量 J=0.54×10-3 Kg·m2;额定转矩
均为3.3mH;永磁磁链为0.175Wb;电动机转动惯量 J=0.54×10-3 Kg·m2;额定转矩![]() 为4 Nm,额定转速为1500 r/min,极对数为2。
为4 Nm,额定转速为1500 r/min,极对数为2。
设定转速为1200r/min,电机起动时的负载转矩为2Nm,在0.03s时刻负载突变为4Nm。图4和图5分别是传统PI控制和模糊PI控制下的转速波形,可以看出,模糊PI控制较传统PI控制在启动时转速超调量小,突加负载时转速波动小。图6和图7别是传统PI控制和模糊PI控制下的转矩波形,可以看出,使用模糊PI控制的系统在启动和负载突变时,转矩过渡更稳定,对负载跟踪能力更强。
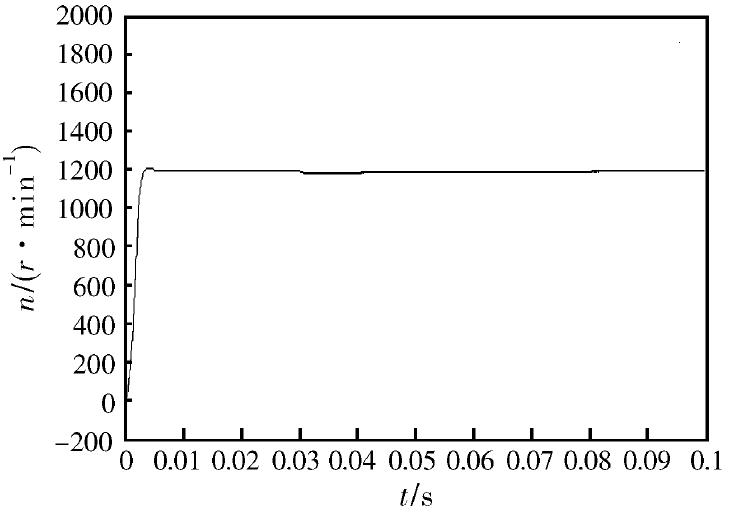
图4 传统PI控制转速波形

图5 模糊PI控制转速波形

图6 传统PI控制转矩波形

图7 模糊PI控制转矩波形
5 结束语
本文针对采用传统PI速度控制器的PMSM矢量控制系统存在的缺陷,提出采用参数自整定模糊PI控制器代替传统的PI速度控制器,并在Matlab/Simulink环境下建立了基于模糊PI控制器的系统仿真模型。仿真结果表明,采用模糊PI控制器的系统响应速度更快,抗干扰能力更强,运行更加稳定。




共0条 [查看全部] 网友评论